
飞跨电容三电平逆变器空间矢量调制及电容电压平衡控制
2019-11-15 08:09:34秦佳昕宋文祥
微电机 2019年9期
秦佳昕,宋文祥,张 琪
(上海大学 机电工程与自动化学院,上海200444)
0 引 言
近年来多电平逆变器是高压、大功率应用领域的一个研究热点,与两电平逆变器相比,三电平拓扑结构具有输出电流谐波畸变率低、开关电压应力小等优势,对电机三相电流高频谐波的减少,以及电机高频振动噪声的降低都有一定作用[1-2]。二极管箝位逆变器拓扑结构在三电平应用中广受欢迎[3-4],但是当多电平或调制度较高时,直流侧电容中点电压平衡实现困难。飞跨电容拓扑结构避免了二极管箝位电路器件数量消耗过大、二极管耐压不均衡和中点电压不平衡问题[5],逆变器电平数易扩展,逆变器的控制灵活,当整流侧采用类似的结构时,逆变器还可以四象限运行[6-7]。为保证逆变器的运行安全,在运行过程中必须严格控制飞跨电容电压的平衡。
飞跨电容逆变器的调制策略主要分为载波脉宽调制(Carrier-based Pulse Width Modulation,CBPWM)[8-9]和空间矢量脉宽调制(Space Vector Pulse Width Modulation,SVPWM)[10-11]。CBPWM由于具有操作简单,易于实现的特性而被广泛应用,但飞跨电容电压不易控制,较低的调制度下的输出电压谐波性能较差。SVPWM开关模型简单、数字容易实现、电压利用率高、谐波性能好,而且通过合理的选择冗余状态,可以在输出相同电压波形下,降低开关损耗,能够有效提高逆变器的输出性能。由于SVPWM调制策略的复杂性,当逆变器输出电平数超过5时,便很难应用[12]。
本文提出一种计算方便的飞跨电容三电平逆变器空间矢量调制策略,基于传统三电平SVPWM策略,通过判断飞跨电容电压不平衡方向和负载电流的流向,采用砰砰滞环控制方法,引入电容电压调整系数,确定各相冗余工作状态OA和OB的相对作用时间,从而实现飞跨电容电压的平衡和稳定。该方法简化冗余矢量的选择和时间计算,容易推广至多电平。最后对所提出的控制方法进行了仿真研究,结果表明飞跨电容三电平调制模式及其电容电压平衡控制的有效性。
1 飞跨电容三电平逆变器主电路
飞跨电容式三电平逆变器主电路如图1所示。逆变器正常工作时,每个飞跨电容上的电压维持在Udc/2,起到电容箝位效果。

图1 飞跨电容式三电平逆变器主电路
以N点为零电位参考点,负载电流ix(x=a,b,c)流出逆变器为正方向。通过控制开关通断,各相桥臂具有四种工作状态:P状态、N状态、OA状态和OB状态,输出电压具有三个状态:Udc、Udc/2、0。以A相桥臂为例,电路工作状态如图2所示。下面对四种工作状态进行分析[8]。
(1)P状态:如图2(a)所示工作状态为P状态时,S1、S2导通,S3、S4关断,相电压输出为Udc。
(2)N状态:如图2(b)所示工作状态为N状态时,S3、S4导通,S1、S2关断,相电压输出为0。
(3)OA状态:如图2(c)所示工作状态为OA状态时,S1、S3导通,S2、S4关断,相电压输出为Udc/2。若ia>0,则负载电流ia由P点经过S1、电容Ca、续流二极管D3到A点,电容Ca充电;若ia<0,则负载电流ia由A点经过S3、电容Ca、箝位二极管D1到点P,电容Ca放电。
(4)OB状态:如图2(d)所示工作状态为OB状态时,S2、S4导通,S1、S3关断,相电压输出为Udc/2。若ia>0,则负载电流ia由N点经过续流二极管D4、电容Ca、S2到A点,电容Ca放电;若ia<0,则负载电流ia由A点经过箝位二极管D2、电容Ca、S4到点N,电容Ca充电。
飞跨电容式三电平逆变器单相桥臂工作状态与开关管对应关系如表1所示[9]。其中,OA状态和OB状态输出电压大小相等、对外输出作用相同,为O状态的两个冗余工作状态。表中,“1”表示导通,“0”表示关断。
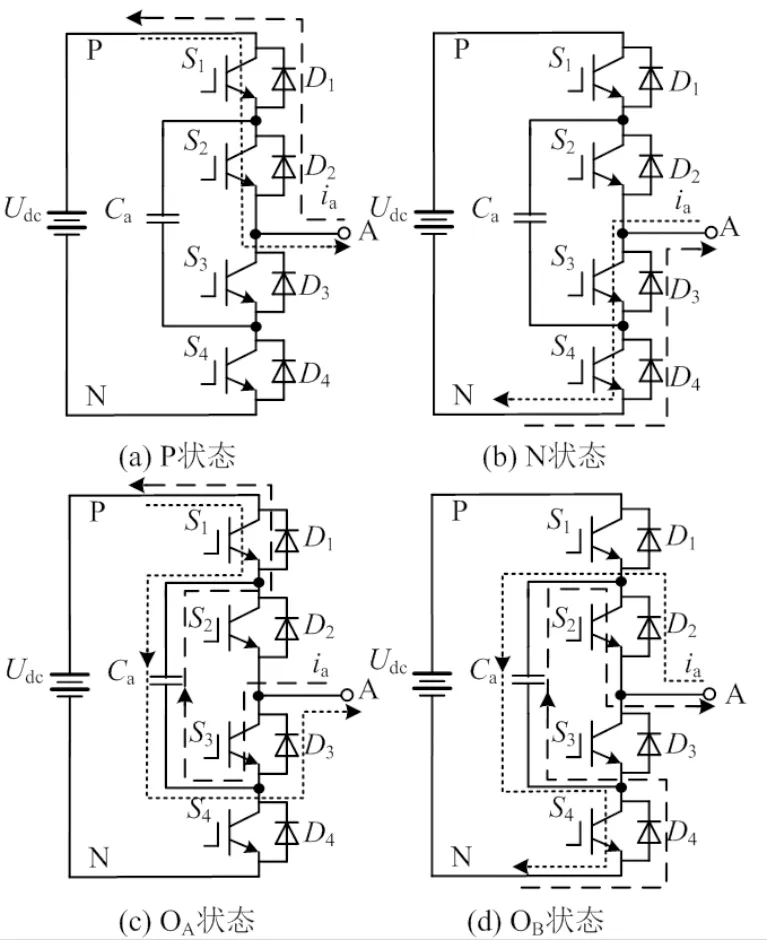
图2 飞跨电容式三电平逆变器A相桥臂工作状态

表1 单相桥臂工作状态与开关管对应关系
飞跨电容充放电与工作状态对应关系如表2所示。OA状态和OB状态的输出电压均为0,二者输出作用效果相同;负载电流ix方向一致时,对飞跨电容电压作用相反。因此,可以通过调节OA和OB的相对作用时间,独立地控制电容电压的平衡[10]。

表2 电容充放电与工作状态对应关系
2 飞跨电容三电平空间矢量调制策略
飞跨电容式三电平逆变器与二极管箝位型三电平逆变器的拓扑结构十分相似,因此可以将传统三电平空间矢量调制策略应用到飞跨电容式三电平逆变器上。
空间矢量调制主要有以下3个步骤[3]:
(1)区域判断。确定参考电压矢量所在区域,找出合成参考电压矢量的三个基本空间矢量。
(2)时间计算。确定三个基本空间矢量的作用时间,即每个矢量对应的占空比。
(3)矢量时序分配。确定各个基本矢量对应的开关状态及作用次序,将基本矢量对应的作用时间分配给相应的开关状态,实现对开关器件的控制。
三电平逆变器每相输出Udc/2,0,-Udc/2三种电压,通过Park变换,可以得到图3所示输出27种基本矢量。以区域I为例,参考矢量合成如图4所示[11]。由于每个O状态均对应OA和OB,因此飞跨电容三电平逆变器存在多个冗余工作状态。首先根据参考矢量幅角确定所在图3所示大区域位置,其次依据式(1)~式(3)三条规则判断小区域位置,具体判断如表3所示。
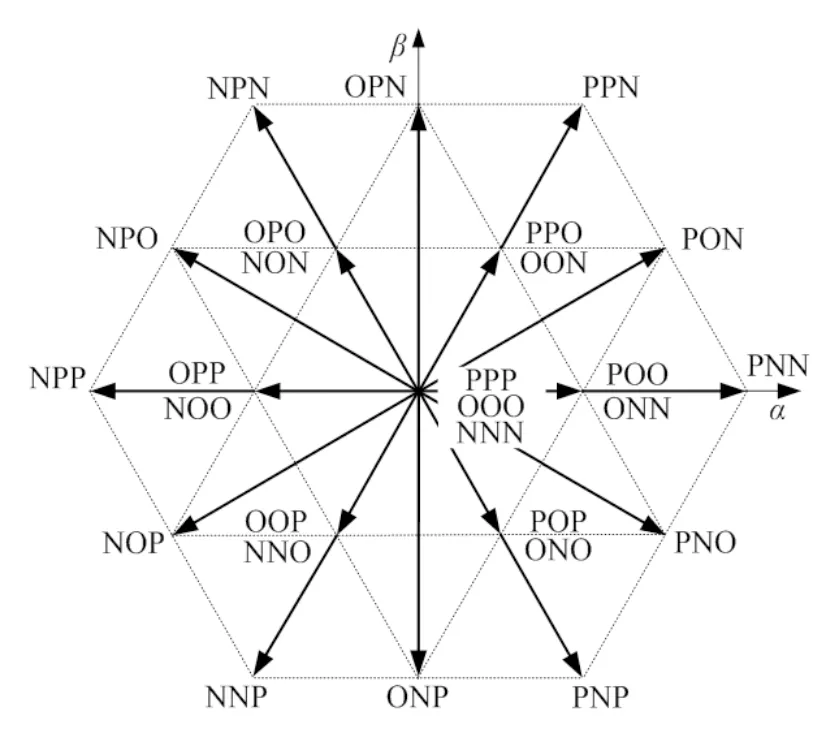
图3 三电平逆变器空间状态矢量图
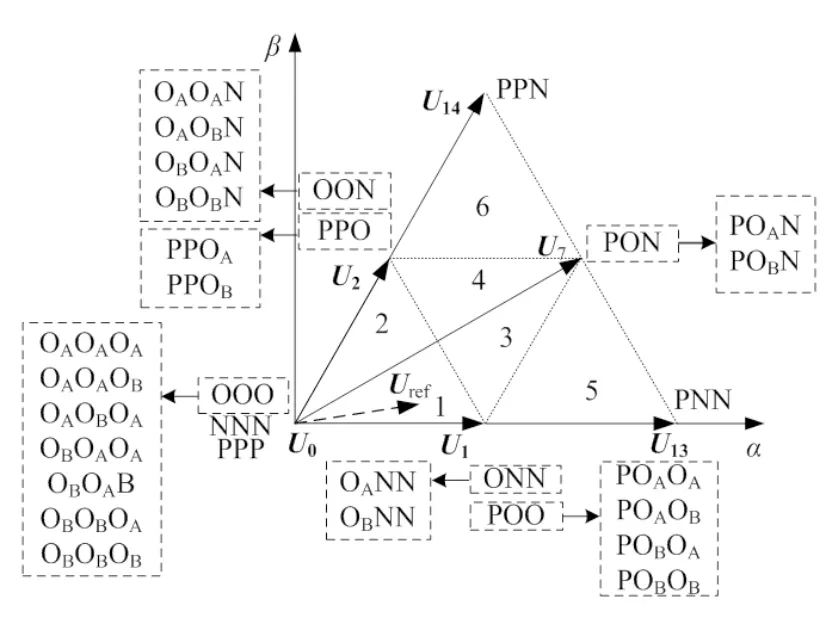
图4 区域I参考矢量合成
规则1:
(1)
规则2:
(2)
规则3:
(3)
式中,Uα、Uβ分别为参考矢量Uref在α、β轴上的投影分量。

表3 小区域判断规则
经过区域判断,参考电压矢量Uref可由最近三个基本空间矢量等效合成。根据伏秒平衡原理,解方程组(4)可以得到各基本矢量的作用时间[3]。
(4)
式中,T1、T2、T3分别为矢量U1、U2、U3的作用时间Ts为空间矢量调制的控制周期。定义调制度m为
(5)
式中,Uref为参考电压矢量幅值,Udc为直流母线电压。采用八段式时序分配得到开关控制信号,以第I-1区域为例,首发负小矢量的输出电压矢量时序图如图5所示。
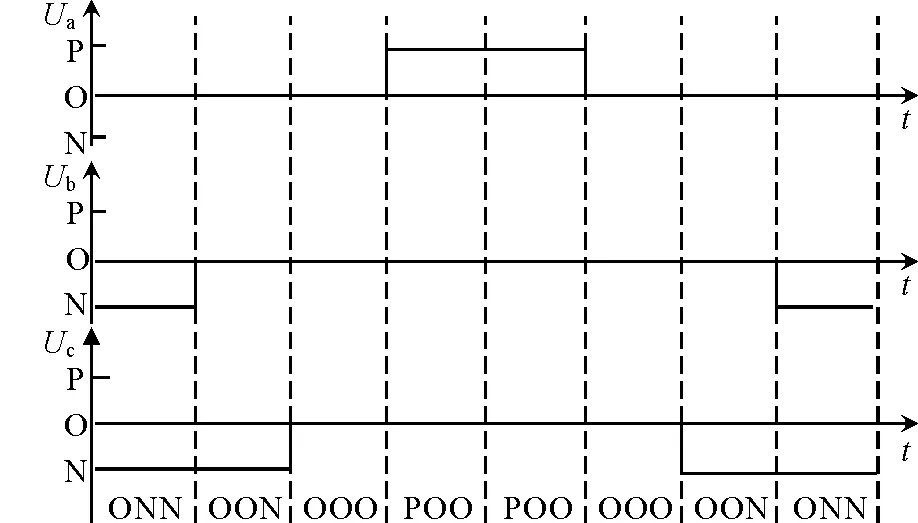
图5 首发负小矢量的输出电压矢量时序图
值得注意的是,采用传统三电平逆变器SVPWM控制,可以满足输出电压的控制要求,但是飞跨电容电压偏移将导致逆变器不能稳定运行。本文接下来针对飞跨电容式三电平逆变器电路结构,研究相应调制算法实现对输出电压和电容电压平衡两方面目标进行控制。
3 飞跨电容电压平衡控制
基于传统三电平空间矢量调制,采用负小矢量首发的八段式矢量作用顺序,将空间矢量的作用时间分配给对应的矢量状态。每相输出为状态O时,实际电路对应两种工作状态:状态OA和OB,则存在状态OA和OB作用时间如何分配问题,即冗余工作状态的选取问题。设kx为x(x=a,b,c)相飞跨电容电压调整系数,状态OA的作用时间TA=kx·to,状态OB的作用时间TB=(1-kx)·to,to为状态O的作用时间。
以第I-1区域A相为例,该区域矢量作用次序为[ONN] →[OON] → [OOO] → [POO] → [POO] → [OOO] → [OON] → [ONN],即A相作用次序为[O] → [O] → [O] → [P] → [P] → [O] → [O] → [O]。假如将状态OA和OB作用时间平均分配(ka=0.5)如图6所示,A相作用次序为[OA] → [OA] → [OA] → [P] → [P] → [OB] → [OB] → [OB],图中负载电流ia>0,Ts表示开关周期。由表2可知,当ia>0时,状态OA对电容充电,充电时间为TA;状态OB对电容放电,放电时间为TB。当ka=0.5时TA=TB,即对电容充放电时间相同。但是在一个采样周期内,负载电流大小仍然按照正弦规律变化,在TA时间间隔内的负载电流小于TB时间间隔内的负载电流。在相同时间间隔内通过电容的充电电流和放电电流大小不相等,造成电容电荷的积累(或流失),导致电容电压不平衡。
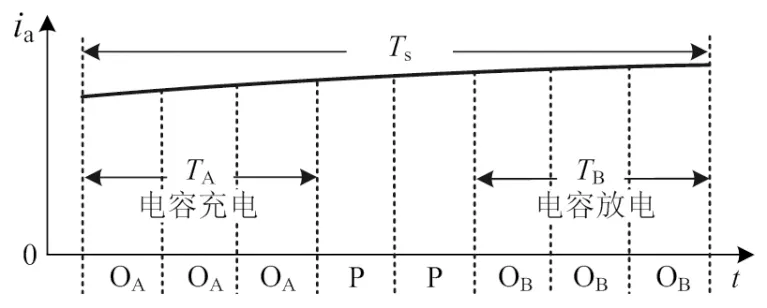
图6 第I-1区域A相状态OA和OB平均分配与负载电流示意图(ia>0)
为保证电容电压平衡,通过检测实际负载电流ix方向,就可以知道状态OA或OB对飞跨电容电压的影响方向,并考虑到x相的飞跨电容电压Ucx的不平衡方向,来调整状态OA和OB的相对作用时间,即改变飞跨电容电压调整系数kx。一般取0.25≤kx≤0.75,本文kx取0.4或0.6。
具体控制规律如表4所示,当Ucx>Udc/2,且ix<0,则kx>0.5,否则kx<0.5;当Ucx

表4 飞跨电容电压调整系数kx取值
根据上述控制规则,第I-1区域A相作用顺序中加入平衡控制后,状态OA作用时间TA和状态OB作用时间TB与负载电流关系如图7所示。这种闭环电容电压控制方案实际上是一种砰砰滞环控制,飞跨电容电压调整系数kx的滞环取值如图8所示,图中ΔUcx=Ucx-Udc/2,滞环宽度δ。该控制方式需要每相电流方向的信息,基于这些信息,分配状态OA和OB的相对作用时间,使得电容电压向着不平衡的相反方向移动。
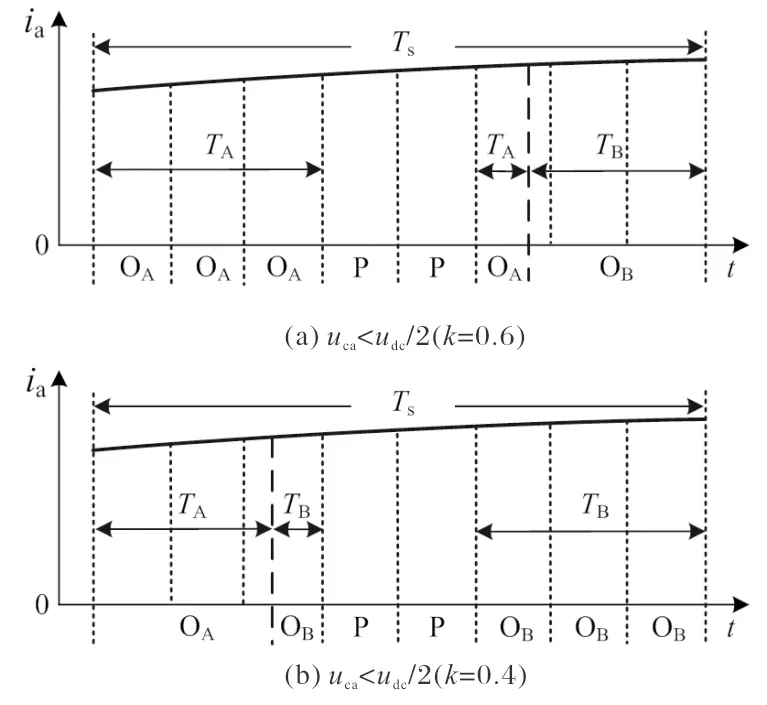
图7 加入平衡控制后第I-1区域A相状态OA和OB作用与负载电流示意图
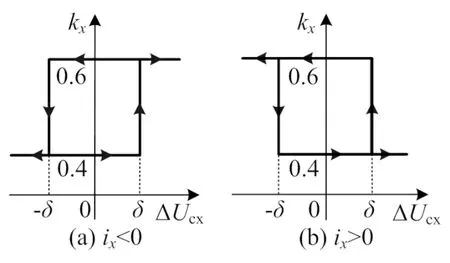
图8 飞跨电容电压调整系数kx
图9给出了飞跨电容三电平逆变器空间矢量调制系统的总体方案框图,主要包括参考矢量输入、空间矢量调制和飞跨电容电压平衡控制及其三电平逆变器,其中通过检测逆变器中各相负载电流ix和各相飞跨电容Ucx进行电容电压平衡控制。
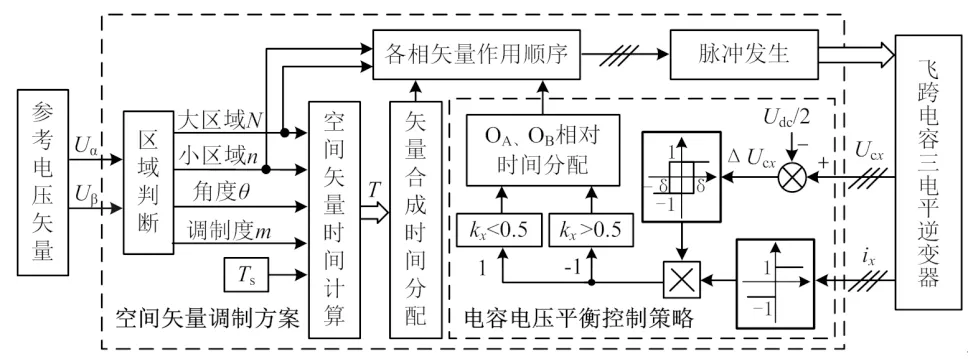
图9 飞跨电容三电平逆变器空间矢量调制系统方案
4 仿真研究
为验证本文提出的控制算法,基于Simulink建立了仿真模型,并针对三相阻感负载进行仿真研究。仿真中的主要参数为:直流母线电压540 V,开关频率2 kHz,电压滞环宽度5 V,负载电阻12 Ω,负载电感20 mH,飞跨电容取值220 μF。
图10分别显示调制度m为0.4、输出频率f为20 Hz,调制度m为0.8、输出频率f为40 Hz以及调制度m为1.0、输出频率f为50 Hz下电容电压平衡控制线电压、相电流和飞跨电容电压波形。在t=0.3 s之前没有施加平衡控制,之后加入本文研究的电容电压平衡控制策略。从图中可看出,未施加控制之前飞跨电容电压有较大偏移,加入平衡控制后,电容电压不平衡现象得到了有效抑制,输出波形得到明显改善,验证了所提出的平衡控制方法的正确性和有效性。

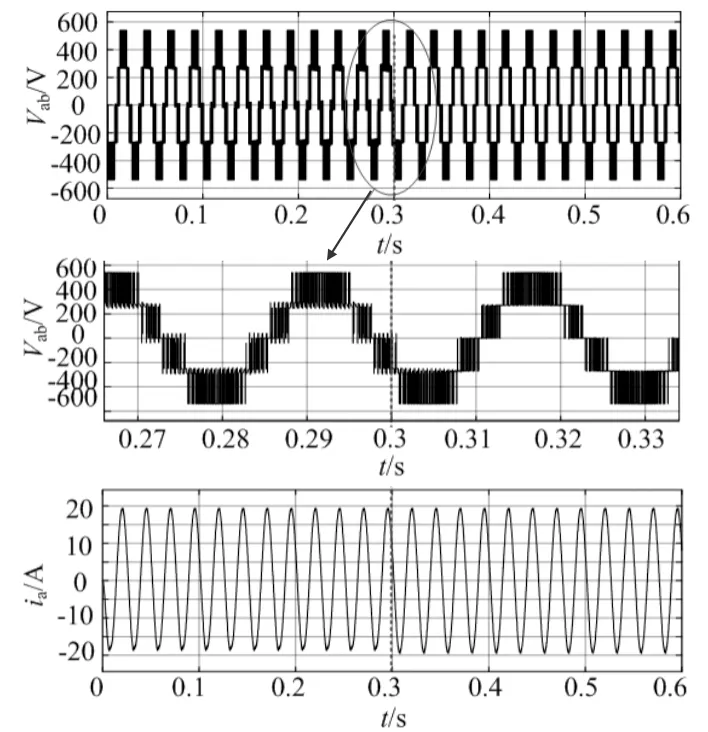

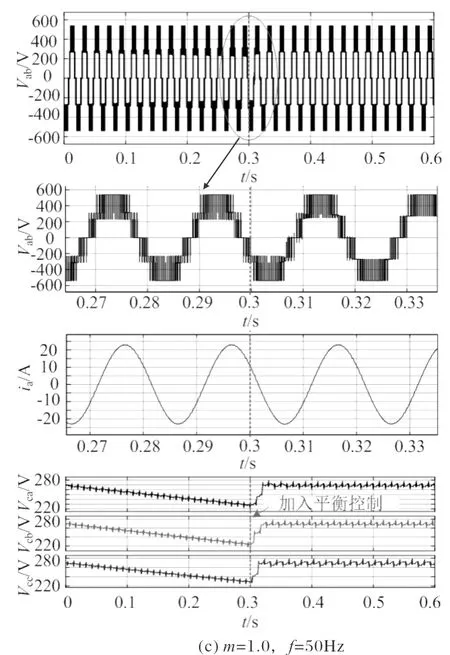
图10 施加电压平衡控制前后的线电压、相电流和飞跨电容电压波形
图11给出了三种调制度m与频率f的连续运行仿真结果,在0~0.15 s时间段m=0.4、f=20 Hz,在0.15~0.3 s为m=0.8、f=40 Hz,而在0.3~0.45 s则运行于m=1.0、f=50 Hz。特别地,由图11(c)可看出调制度由低到高的连续运行条件下电容电压均能够稳定在260~280 V之间,表明所提出的平衡控制策略能够在由低到高的整个调制范围内运行。

图11 不同调制度连续运行时的线电压、相电流和飞跨电容电压波形
由于不同的飞跨电容取值对电压平衡控制的效果和影响不同,图12给出了m=0.8、f=40 Hz时的三种不同飞跨电容值的仿真对比结果,在0~0.15 s时间段的电容值为68 μF,在0.15~0.3 s时电容为220 μF,而在0.3~0.45 s时电容为470 μF。由图12(c)可以看出电容值越大,电容电压波动越小,平衡控制效果越好。但考虑到电容体积、成本等问题,电容值不宜过大,应该根据实际需要选取电容大小。

图12 采用不同飞跨电容值的运行结果对比
5 结 语
本文研究了飞跨电容式三电平逆变器空间电压矢量调制策略,并针对其运行中出现的飞跨电容电压不平衡问题,给出了一种新型电容电压平衡控制方法,该方法基于传统三电平SVPWM算法,通过判断飞跨电容电压不平衡方向和负载电流的流向,确定每相冗余工作状态OA和OB的相对作用时间,能够实现电容电压的平衡控制。不同调制度和飞跨电容值条件下的仿真结果,充分验证了所提出的系统控制方案的有效性。
猜你喜欢
中学生数理化·高一版(2021年11期)2021-09-05 12:21:24
电子制作(2019年10期)2019-06-17 11:44:58
电子测试(2018年18期)2018-11-14 02:30:28
传感器与微系统(2018年7期)2018-08-29 00:44:40
现代防御技术(2016年1期)2016-06-01 12:13:28
电测与仪表(2016年22期)2016-04-12 00:19:58
新高考·高一物理(2016年1期)2016-03-05 22:47:39
电子工业专用设备(2015年4期)2015-05-26 09:10:33
电测与仪表(2015年2期)2015-04-09 11:28:58
电测与仪表(2014年7期)2014-04-04 12:09:32
