
基于ESO的PMSLM无差拍电流预测控制
2019-09-20 10:59施昕昕王通通谢高硕
微电机 2019年7期
林 健,刘 晗,万 其,施昕昕,王通通,谢高硕
(南京工程学院 先进数控技术江苏省高校重点建设实验室,南京211100)
0 引 言
在PMSLM驱动系统中,电流环作为内环,其动态及稳态控制性能直接决定了直线电机推力的品质,因此高性能的电流控制策略受到了众多学者的关注[1]。对于PMSLM数字控制系统,采用无差拍电流预测控制可以以较少的计算量获得较好的跟踪性能,适合数字式控制[2-4]。该方法基于电机电压方程离散化模型来预测电压基准,通过SVPWM将其转化为相应的开关信号[5]。然而,无差拍预测控制完全依赖于精确的PMSLM模型,这意味着模型参数失配会使得计算的电压基准偏离其期望值。
为解决参数扰动问题,在文献[6]中,提出了一种采用增量调制器作为电流调节器的方法,可以有效地减小电流的稳态误差。在文献[7]中,设计了鲁棒预测电流控制方法,以减小电感参数失配引起的期望电流与测量电流之间的电流误差,但该方法忽略了永磁体磁链和电阻失配的影响。在文献[8]中,提出了用并联积分环方法进行预测控制,以补偿电机模型的不精确性和电机参数的变化,然而很难调整积分增益以获得较好的瞬态响应且不超调。
本文提出了一种改进的ESO,从电流量误差中提取扰动量的误差值,并将其用于观测扰动量,收敛速度快,同时利用时变增益的方式避免了初始时刻电流峰值过大。最后将改进的ESO用于观测扰动量,并应用于无差拍电流预测控制,提高了系统的鲁棒性。
1 ESO的设计
为了方便研究主要问题,将复杂的PMSLM系统简化,忽略电机绕组和永磁体的阻尼作用,忽略涡流和磁滞损耗,假设励磁磁场与电枢反应磁场均是正弦分布。在dq坐标系下的永磁同步直线电机数学模型可以表示为:
(1)
式中,R为初级电阻,为次级极距,φf为次级永磁体磁链,Ld、Lq分别为d、q轴电感分量,由于采用的是表贴式结构,因此可以Ld=Lq=L。ud、uq分别为初级d、q轴电压,id、iq分别为初级d、q轴电流,v为初级运动速度。
电机参数受系统工况等不确定因素影响,实际参数与标称参数会有偏差,式(1)变为
(2)
式中,R0、L0、φf0为电机电阻、电感、磁链的标称参数。ΔR、ΔL、Δφf为电机电阻、电感、磁链的参数偏差,ΔR=R-R0,ΔL=L-L0,Δφf=φf-φf0
若令ESO中电压ud、uq作为输入量,电流id、iq作为状态量,其余量分别作为dq轴总扰动fd、fq:
(3)


(4)


(5)

可以看出,传统ESO通过电流量的观测值和实际值的误差e1,来调节观测值的导数。用e1调节电流的导数符合误差控制原理,但若是用于调节扰动观测值z2的导数,将导致收敛速度变慢[9-11]。为此考虑将扰动量误差e2也加以利用,并用以调节z2的导数。由于扰动量无法直接测量,考虑从式(4)和式(5)中,通过用z1的导数和x1的导数相减来提取:
(6)

(7)
然而式(7)所示的ESO依然是高增益观测器,这将导致系统初始时刻出现峰值过大现象,甚至引发震荡问题[12]。本文将观测器的增益设计为时变增益,在初始时刻设置较小的增益来抑制峰值过大问题,随后逐渐增大并稳定于一个常值。设定增益为比例函数:
(8)
式中,γi和ηi为常数,ki为比例系数,ti为时间,i=1,2。
2 观测器稳定性分析
无差拍预测控制是一种离散化的控制系统,因此观测器的稳定性分析要基于离散化模型,将状态空间描述和改进后的ESO进行前向欧拉离散化,可得:
x(k+1)=A1x(k)+B1u(k)+E1h(k)
(9)
z(k+1)=A1z(k)+B1u(k)-L2(k)e(k)
(10)
式(9)和式(10)中,状态转移矩阵变为A1=TA+I;控制矩阵变为B1=TB;干扰矩阵变为E1=TE;观测器增益矩阵变为L2=TL1;T为采样周期;I为单位矩阵。
假设采样周期T足够小,扰动在两个采样周期内几乎不变,则h(k)可以忽略。将式(9)和式(10)相减,可得误差状态矩阵:
(11)
由于e2(k)中含有e1(k+1),考虑通过线性变换分析误差状态:
(12)

则观测器的特征方程为

(13)
因为ESO增益均大于0,可知观测器所有特征根均为负实部,即观测器极点均分布于z域单位圆内,观测器稳定[13]。离散ESO结构如图1所示。

图1 离散ESO结构图
3 基于ESO的无差拍电流预测控制
将上述ESO观测出的dq轴系统扰动,引入至电压方程式(3)中,并将之离散化,得到基于ESO的电流预测控制算法:
(14)

图2 基于ESO的电流预测控制算法框图
4 实验结果
本文采用的实验平台如图3所示,其中PMSLM由Kollmorgen公司生产,电机的参数如下:电感L=0.0134 H,电阻R=1.3 Ω,极距=0.032 m,磁链ψ=0.11 Wb,阻尼系数为0.2 Ns/m,采样周期为T=100 μs。平台的配套软件系统可以对直线伺服系统的运行方式进行监控、设置,实时读取实验数据并保存,用于后续的分析与处理。

图3 直线电机伺服实验平台
为了验证设计的电流预测控制算法有效性,分别利用传统ESO和改进ESO,进行了电机电流跟踪和速度跟踪试验。首先,分别将控制器中的电感、磁链、电阻的给定参数设定为2.5L、0.5ψ、0.2R,采用id=0的控制策略并给定电流iq=2A。改进ESO参数为:γ1=3,η1=6,t1=4 ms,γ2=400,η2=600,t2=4 ms。传统ESO参数为:l1=4,l2=600。结果如图4~图6所示,当电感给定值为2.5L,无ESO的无差拍预测控制系统的谐波含量逐渐增大,将会失稳,并且电流响应速度较慢;当磁链给定值为0.5ψ,无ESO的系统,iq存在偏差且偏差逐渐增大;当电阻给定值为0.2R时,iq存在恒定偏差;而应用传统ESO和改进ESO的控制方法,都可以抑制参数扰动带来的问题,但是改进ESO更好的抑制了峰值,且电流跟踪速度更快。
比较速度跟踪性能时,令给定电机速度为100 mm/s,外加负载力为300 N,将控制器中电感、磁链、电阻等参数给定值设为2.5L、0.5ψ、0.2R,图7为对应的速度跟踪波形比较,应用改进ESO的无差拍预测控制,启动时电机速度波动更小,启动后速度更加平稳,而传统ESO补偿下的无差拍预测控制,在初始时刻峰值较高且出现了震荡。实验结果表明,本文提出的电流控制算法初始时刻峰值较低,响应速度快,避免了参数扰动造成的电流静差以及失稳问题。
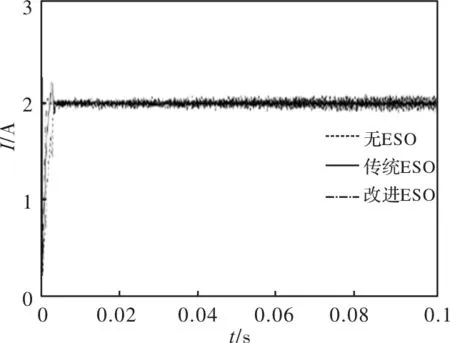
图4 给定电感2.5L时电流跟踪波形比较

图5 给定磁链0.5ψ时电流跟踪波形比较

图6 给定电阻0.2R时电流跟踪波形比较
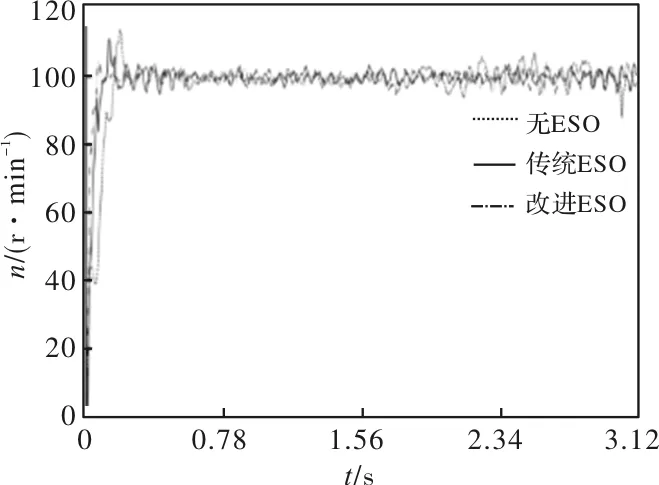
图7 存在差数偏差时速度波形跟踪比较
5 结 语
为解决PMSLM无差拍预测控制系统中参数扰动带来的电流静差及失稳等问题,将参数扰动引入电压方程并建立数学模型。并在此基础上提出了一种改进ESO。从电流量误差中提取扰动量误差的信息,根据误差控制原理,将其用来调节扰动量观测值,加快了观测器的跟踪速度,并且设计了时变的增益用以抑制电流峰值过大问题。从数学上证明了该观测器的稳定性,并将其用于无差拍控制系统的电流实时补偿。最后在PMSLM控制系统试验平台上,给定电流和速度下,开展系统不同参数存在偏差时的电流与速度跟踪试验,结果表明该方法对系统参数偏差带来的扰动具有较强的鲁棒性,有更快的电流跟踪速度且有效抑制了初始时刻电流峰值。
猜你喜欢
微电机(2022年8期)2022-10-12
传感器与微系统(2022年3期)2022-03-23
电源学报(2022年1期)2022-02-25
通信电源技术(2021年9期)2021-09-23
西安航空学院学报(2021年5期)2021-04-15
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
航空发动机(2020年3期)2020-07-24
电源学报(2020年3期)2020-06-28
微特电机(2019年7期)2019-08-02
