
基于硬件在环的舵鳍联合减摇实验系统设计
2019-09-12 02:48
船海工程 2019年4期
(海军工程大学 导航工程系,武汉 430033)
船舶在转弯过程中,会产生较大的横摇,过大的横摇会降低船舶的安全性[1],因此,研究舵鳍联合减摇及航迹保持具有一定的工程应用价值。目前,国内外已经研制出了具有航迹控制功能的操舵仪并开始装备使用。虽然船舶上都安装了减摇鳍与自动舵,但一般都是通过舵机系统控制船舶的航向、航迹,通过减摇鳍控制器实现船舶减摇,两个系统独立工作,系统之间没有直接联系。根据实际的船舶航行经验,在航行过程中,操舵控制会影响船舶的横摇运动,鳍的运动会影响船舶的艏摇运动,因此,将相互独立的舵控制系统与鳍控制系统联合起来,综合考虑两种控制的耦合效应,一定程度上会提高船舶航迹航向控制及鳍减摇控制性能[2-3]。
实验室条件下,不能最大限度模拟真实的船舶舵鳍联合减摇情况,也无法验证所设计的控制算法在实船上是否有效可行。针对这一问题,设计构建舵鳍联合减摇的硬件在环实验系统,以文献[4]为基础建立基于船舶航迹保持的横摇模型,在实际装备的控制器中根据船舶航迹全局NPD最优控制算法设计舵鳍联合减摇控制算法,通过实际物理信号与Simulink环境下建立的仿真系统模型实时通信,进行半实物实时仿真,以检验实验系统的可行性及设计的算法在减摇与航迹控制方面的有效性。
1 船舶运动模型
在船舶航行过程中,船舶直线航迹运动非线性模型为
(1)
式中:y为橫偏位移;U为航速;ψ为航向角;r为艏摇角速度;δc为控制舵角;K、T、α、β为船舶参数。对于大部分船舶α≥0成立;当β=1时,为直线稳定船舶;当β=-1时,为直线不稳定船舶。
对于船舶横摇运动,根据Conolly的理论及当船舶横摇运动较小时,可对其线性化,得到线性横摇数学模型。

由于舵角与艏摇角速度对横摇角的耦合较强,故横摇模型中还需考虑艏摇角速度r与实际舵角δa[5],即式(2)可改为
mr+nδa
(3)
式中:m、n分别为艏摇角速度、舵角对横摇角的影响因子,其值可以根据船舶参数,利用文献[6]中计算船舶运动的分离型模型或者通过回转实验获得。

(4)
联立式(1)、(3)、(4),可得到船舶航迹控制及横摇运动非线性模型。
2 航迹控制及减摇算法
文献[7]提出的基于最优控制的船舶航迹全局NPD控制律为
δc=-kψ(ψ+f(y))-krr
(6)
船舶进行舵鳍联合减摇控制过程中,尤其当船舶进行转弯运动时,在考虑艏摇角速度和舵角对横摇角的影响后,仅引入横摇角及横摇角速度反馈的最优控制器无法消除艏摇角速度和舵角造成的船舶横摇运动。若要提高减摇效果,则应减摇控制器中考虑引入船舶的艏摇角速度与舵角反馈,故设计减摇控制器[8]如下。
αc=-(kpφ+kdp+kαrr+kαδδa)
(7)
式中:kp、kd、kαr、kαδ为控制器中相应的状态反馈系数。
3 硬件在环实验系统设计
为了在实验室条件下,利用实际的控制器和真实的通信信号,最大限度地模拟实际船舶的运动,通过串口实现操舵仪控制器和仿真系统的实时通信,实现半实物仿真。模拟器中的数据和Simulink仿真结果,可以更加直观全面地反映船舶的航线跟踪情况和舵鳍联合减摇的效果。
该实验系统组成主要包括装备在实际船舶的船载电子海图系统(ECS)、自动操舵仪设备及外置电脑中利用Simulink仿真模块搭建的横摇/鳍机运动模型。其实物见图1,其中图1a)为硬件在环仿真系统整体实物,图1b)为ECS操作界面。硬件在环仿真系统结构示意于图2。

图1 硬件在环仿真系统

图2 硬件在环仿真系统结构
由图2可知,整个系统的工作流程为状态设置模块首先对控制器进行设置,船载电子海图系统ECS设置船舶参数、规划计划航线,之后进行正向(反向)监视,将计划航线输入至操舵仪设备中的减摇及航迹控制器,控制器根据减摇目标及航迹保持要求得到转舵指令和转鳍指令,转舵指令传输给操舵仪中的模拟器,通过模拟器中的船舶航向航迹运动模拟解算得到模拟GPS信号、模拟计程仪信号、模拟罗经信号以及实际舵角信号,再反馈至控制器中;同时控制器给出的转鳍指令和模拟器给出的舵角信号通过串口传输到外置电脑中搭建的Simulink仿真系统中,经过船舶横摇/鳍机运动模拟得到的横摇角和实际鳍角信号,也反馈回控制器。其中减摇及航迹控制器输出航向、舵角信息至航向显示器、舵角显示器和综合显示器。
4 实验仿真分析
在船载电子海图系统上设置船型参数:船长100 m、船宽50 m,转舵半径650 m,GPS距船艏50 m、离左舷25 m。在PC机上将船舶模拟位置设置在广东雷州半岛附近,初始船位为北纬20°33′,东经110°39.5′,船速设置为15 kn,初始航向为280°,计划航线为W32—W33—W34—W35。采用前述控制器,得到仿真结果见图3~7。

图3 ECS的计划航线

图4 模拟航迹

图5 模拟舵角和航向
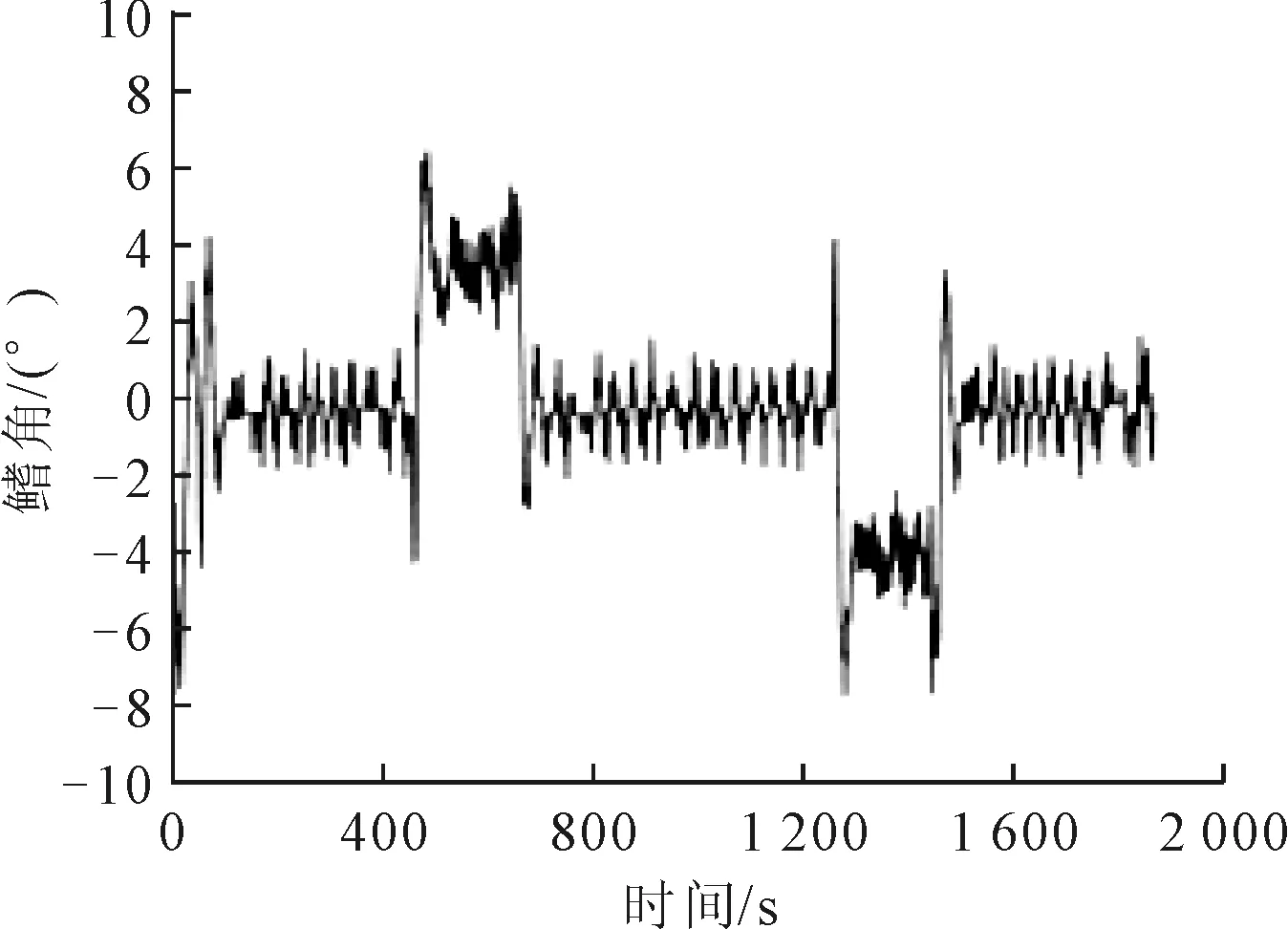
图6 鳍角α的变化

图7 横摇角φ的变化
图3为船载电子海图中规划的计划航线。
图4为船舶航向航迹运动模拟器给出的实际航迹,其中虚线为计划航线,实线为船舶实际航行轨迹,图4表明被控船舶能够较好地跟踪计划航线航行。
图5为相应的舵角和航向变化。
图6为在航迹控制过程中鳍角的变化。
图7为经过舵鳍联合减摇控制后横摇角的变化。仿真曲线表明,直线航行时,船舶横摇角摆动幅度很小,在两个转弯过程中,由图6可见,控制器会给出较大的控制鳍角以提供足够的扶正力矩抑制船舶横倾。由图7可见,在转弯过程中船舶横摇角没有明显变化,仿真实验结果表明所设计的舵鳍联合减摇算法有效,在船舶航行过程中尤其是转弯时具有较好的减摇效果。
5 结论
所设计的硬件在环仿真实验系统在实验室条件下能够模拟实际船舶舵鳍联合减摇情况,通过电子海图、模拟器和仿真结果直观全面地验证了船舶航迹控制下的舵鳍联合减摇控制方法有效可行,同时这种半实物仿真实验方法为舵鳍联合操控仪的研究提供一定的实验基础。
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
舰船科学技术(2022年10期)2022-06-17
科技与创新(2021年24期)2022-01-03
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
雷达科学与技术(2020年4期)2020-09-11
民用飞机设计与研究(2019年4期)2019-05-21
