
智能辅助驾驶系统中横摆角速度信号估计方法的研究
2021-11-05 21:08刘芬曲延羽廖尉华覃高峰林智桂
汽车与驾驶维修(维修版) 2021年10期
刘芬 曲延羽 廖尉华 覃高峰 林智桂

中图分类号:U462 文献标识码:A
0引言
在智能辅助驾驶横向功能中,曲率是轨迹规划的核心要素之一,而曲率的计算则直接依赖于车辆横摆角速度。精确度高的横摆角速度是轨迹规划准确的基石,稳定性好的横摆角速度是横向控制功能表现稳定舒适的基础。
轨迹规划使用的横摆角速度通常来自车辆横摆角速度传感器测量的横摆角速度值。但横摆角速度传感器测量的结果经车载通信网络传输时会叠加信道噪声,同时在车辆行驶工况十分复杂的情况下,横摆角速度传感器所处的工作环境实时变化,其测量结果很难保证准确性和可靠性,不利于实现准确的轨迹规划和开发舒适稳定的智能辅助驾驶横向功能。
1横摆角速度估计方法研究
根据海外博主Bza rg2015年发表的博文《How a Kalman filter works,in pictures》,现有的横摆角速度估计方法中,有基于车辆动力学模型估计横摆角速度,但并未考虑信息融合,信号来源单一,不能明显提升数据可信度。还有研究提出将基于车辆动力学建模的结果与传感器测量的结果融合,但并未考虑经通信信道传输的横摆角速度噪声去除处理。
为使车辆横摆角速度尽可能反映车辆真实的横摆角速度值,本研究方法首先使用卡尔曼滤波算法对通信信道传输的横摆角速度进行噪声滤除处理,作为第一个横摆角速度估计值。其次,基于二自由度车辆动力学模型结合当前车辆横向加速度和当前车辆速度估计横摆角速度,并将经过噪声处理后的横摆角速度值作为测量值,经卡尔曼滤波融合以后得到第二个横摆角速度估计值。再次,基于车辆运动学模型结合车身参数与车辆速度传感器信息估计横摆角速度,也同样将经噪声处理的横摆角速度值作为测量值,经卡尔曼滤波融合以后得到第三个横摆角速度估计值。
最后,将上述3种横摆角速度估计值融合,来达到提高车辆横摆角速度值准确性、可靠性的目的。这种处理方法能充分利用车上已有的硬件资源,在不增加硬件成本的基础上,提高横摆角速度信号的准确性、可靠性和稳定性,助力开发安全、舒适以及稳定性较好的智能辅助驾驶横向控制系统。
2基于车辆动力学和运动学模型估计横摆角速度
2.1基于车辆横向动力学模型估计车辆横摆角速度
2.1.1车辆动力学模型
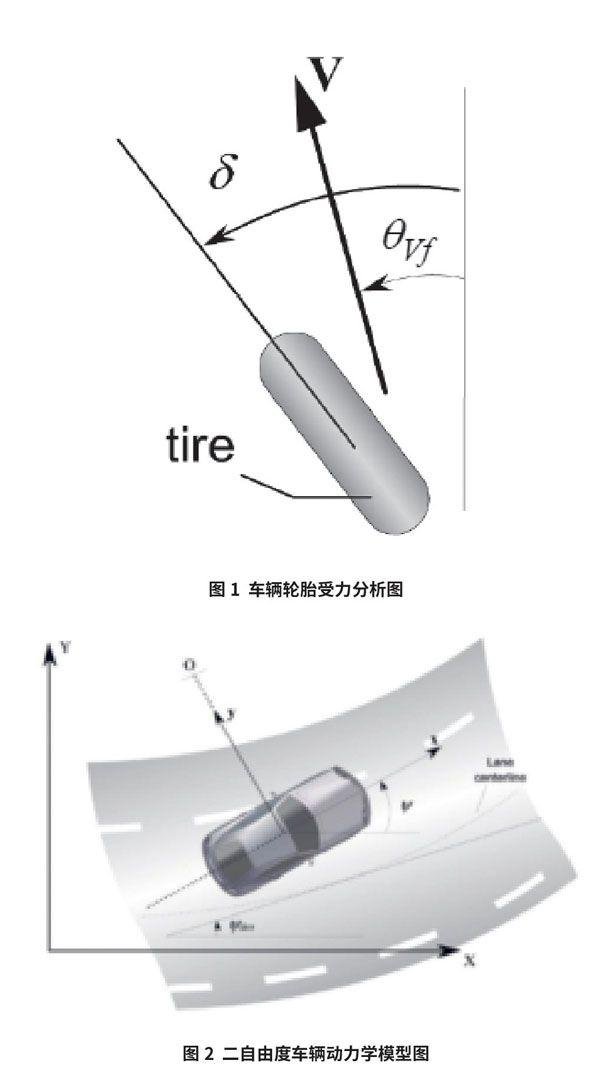
通过车辆轮胎受力分析图与二自由度车辆动力学模型图(图1和图2),分析车辆的受力平衡和力矩平衡,再结合车辆的横向加速度传感器信息与速度传感器信息,可以估算出车辆的横摆角速度。其估计过程如下。
首先,基于图1和图2所示的模型分析出横向加速度和横摆角加速度与横向速度和横摆角速度之间的关系表达式如下。式中δ——前轮轮胎纵轴方向与车辆纵轴方向的夹角
M——车身质量,单位为kg
ψ——车辆横摆角
y——车辆的横向位移,单位为m
C——αf前輪刚度系数
Cαr——后轮刚度系数
Iz——车辆绕Z轴旋转的转动惯量,单位为kg·m2
Vx——车辆的纵向速度,单位为m/s
Lf——前轴中心到车辆质心的距离,单位为m
Lr——后轴中心到车辆质心的距离,单位为m
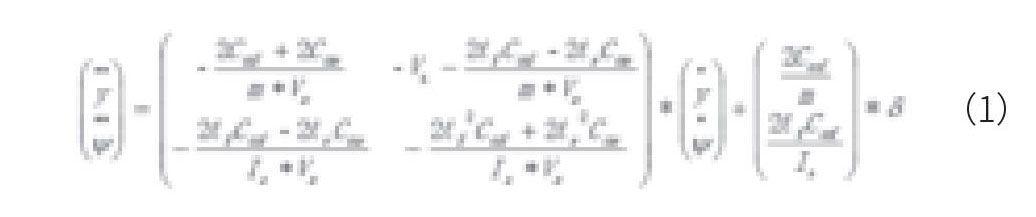
2.1.2表达式线性化得到状态方程
式(1)矩阵方程为非线性模型,而卡尔曼滤波是线性估计器,因此需要对上述模型进行线性化处理,从而得到横摆角速度的状态转移方程。
由雅克比矩阵求解线性化系数:线性化并离散化后的状态方程如下:
由车身横摆角速度传感器和横向加速度传感器的测量值得到观测方程:式(2)~式(4)中:
I2×2——-阶单位矩阵
Wk——卡尔曼滤波状态转移方程中的过程噪声
Vk——卡尔曼滤波观测方程中的测量噪声
其余变量含义与式(1)同。
基于上述状态方程和观测方程,应用卡尔曼滤波器即可得到本方法最终的横摆角速度估计值。
由于此方法是基于二自由度的车辆动力学模型进行计算,相较于车辆真实的运动环境,有一定程度的简化。而且为满足卡尔曼滤波估计器线性化的要求,其状态方程是经过线性处理的状态方程,所以会出现一定程度的误差,导致最终结果不足以表征车辆真实的横摆角速度值。
2.2基于车辆运动学模型估计横摆角速度
基于车辆运动学模型估计横摆角速度时,首先要结合车辆纵向速度v、车身参数和车辆的前轮转角,计算当前车辆的轨迹半径。然后根据以下式(5)计算出车辆的横摆角速度值。
再利用卡尔曼滤波将计算出的横摆角速度值与经噪声处理的横摆角速度值进行融合,得到本方法估计的横摆角速度值。
车辆运动学模型假设车辆在低速匀速圆周运动中车辆轮胎滑移角为0°,车辆轮胎横向不受力。但在车辆实际运动过程中,并不完全遵循匀速圆周运动,且在弯道中车速较高时,轮胎横向受力不可忽视,故此方法不能完全反映车辆真实的横摆角速度值。
3结果验证分析
基于车辆动力学模型估计的横摆角速度,基于车辆运动学模型估计的横摆角速度,经过噪声去除处理后的传感器横摆角速度值,以及前3种结果进行权重融合后的横摆角速度结果如图3所示。
从图3中可知,基于车辆运动学模型估计出来的横摆角速度更稳定,但由于车辆运动学模型条件的简化,并不能完全反映车辆真实状态。基于动力学模型估计的横摆角速度经过一段时间收敛以后,与经处理后的传感器横摆角速度信号值相比有一定的偏置。
结合横摆角速度传感器本身测量的不确定性,将这3种信源进行融合输出能充分利用3种数据源提高数据置信度和减小数据的波动程度,为控车提供稳定可靠的横摆角速值,符合理论分析预期。噪声去除处理加上多种信息源融合,有利于提高横摆角速度估计值的准确性、可靠性和稳定性。
4结束语
本文研究横摆角速度估计方法,在已有的硬件基础上提供除传感器测量值以外的其他2种横摆角速度估计方法。其中重点介绍了基于车辆动力学模型估计横摆角速度的方法。为使最终的横摆角速度值尽可能反应车辆真实的横摆角速度,克服这些单一横摆角速度估计方法的缺点,本研究增加了信号噪声去除处理,并将3种不同途径获取的横摆角速度通过权重融合输出得到最终可靠性较高、稳定性较好的横摆角速度值。
作者简介:
刘芬,本科,助理工程师,研究方向为智能驾驶系统车辆状态、轨迹估计。
猜你喜欢
内燃机与配件(2022年2期)2022-01-17
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05
中学课程辅导·教师通讯(2018年10期)2018-09-04
中学生数理化·高一版(2017年3期)2017-07-08
新高考·高一物理(2016年11期)2017-07-07
电脑知识与技术(2016年27期)2016-12-15
软件导刊(2016年9期)2016-11-07
科技视界(2016年14期)2016-06-08
新高考·高一物理(2016年1期)2016-03-05
