
一种复杂环境下的多假设分支跟踪方法
2020-09-11 12:29:02许厚棣张瑞国
雷达科学与技术 2020年4期
马 娟, 许厚棣, 张瑞国
(1. 中国电子科技集团公司第三十八研究所, 安徽合肥 230088; 2. 空装驻合肥地区第一军事代表室, 安徽合肥 230088; 3. 太原卫星发射中心, 山西太原 030031)
0 引言
雷达系统工作过程中,接收到一个波束的回波探测数据后,经过信号处理系统的点迹检测和数据处理系统的关联、滤波后,上报更新后的雷达航迹信息,完成一个处理循环[1-2]。机载雷达在载机运动的过程中下视探测目标,杂波环境具有强度大、特性复杂、变化快的特点,检测过程中容易发生漏报和虚警;机载雷达一般需要同时跟踪大量目标,跟踪对象包含导弹、飞机、车辆、舰船等各类目标,目标运动参数范围广,缺乏目标的先验信息。因此,机载雷达跟踪目标时,如果航迹与目标一一对应,使一批目标只能处于运动参数固定的某种运动状态下,当目标机动状态不明或目标丢点同时存在机动关联门限内的虚警或杂波时,或者在机动关联门限内有多个符合条件的点迹时,单帧内无法对目标的运动状态进行准确的判断,容易因关联错误带来航迹丢失、航迹误跟、航迹重新起始,严重影响航迹质量[3-5]。
本方法是复杂环境下机载雷达目标跟踪方法的架构设计,区别于常用的极大似然类和贝叶斯类目标跟踪方法[6],在航迹机动状态不明时建立航迹的分支航迹。本方法基于以下概念:每一回波首先考虑目标机动状态不变,同时考虑目标机动状态变化、虚警和新目标出现的可能性。
本方法中航迹根据分支类型分为父、子、孙三类。稳定跟踪的航迹为父航迹,父航迹的机动状态变化时可建立多个机动参数不同的子航迹,子航迹的机动状态不确定时可建立多个机动参数不同的孙航迹。子航迹和孙航迹是雷达内部航迹,不作为雷达情报上报。通过父、子、孙三级分支航迹之间的替代和继承实现对杂波区目标、机动状态未知目标和多目标的稳定跟踪。
1 分支航迹属性
航迹的分支结构示意图如图1所示,图中所示为一批目标的假设航迹层级和分支类型。本示例假设一个父航迹最多可以建立3个子航迹,一个子航迹最多可以建立3个孙航迹,实际使用时可以根据需要设置。图中任意孙航迹节点可为空,任意子航迹节点和其下属的孙航迹可以同时为空。为了实现分支航迹之间的替代和继承,在航迹信息中增加分支信息,分支信息的内容包括当前航迹的分支类型、父航迹索引和子航迹索引。

图1 航迹的分支结构示意图
以跟踪一批历史运动状态为非机动的目标为例,带有分支信息的航迹具有以下属性:
1) 航迹的分支类型包括父、子、孙三类,分支类型为父的航迹(以下简称父航迹)为主航迹,分支类型为子的航迹(以下简称子航迹)为父航迹的分支航迹,分支类型为孙的航迹(以下简称孙航迹)为子航迹的分支航迹,孙航迹不再建立分支航迹。
2) 父航迹的父航迹索引为空,父航迹的子航迹索引为其建立的子航迹,子航迹的父航迹索引为建立它的父航迹,子航迹的子航迹索引为其建立的孙航迹,孙航迹的父航迹索引为建立它的子航迹,孙航迹的子航迹索引为空。
3) 父(子)航迹可以有多个子(孙)航迹,子(孙)航迹只可以有一个父(子)航迹。
4) 父航迹、子航迹可以与新探测的点迹进行非机动关联和机动关联,孙航迹只与新探测的点迹进行机动关联。
5) 父航迹与点迹进行非机动关联成功后更新航迹,解除父航迹与其子航迹和其子航迹与相应孙航迹的分支关系,其孙航迹删除,有非机动更新的子航迹独立出来作为新起始的父航迹,没有非机动更新的子航迹删除。
6) 点迹在父航迹的机动关联门限范围内、父航迹在当前帧没有有效的非机动关联且父航迹的分支航迹数量未满,新建父航迹的分支航迹(子航迹),以父航迹的最近更新点为航迹的起始点。
7) 点迹在子航迹的机动关联门限范围内,子航迹在当前帧没有有效的非机动关联且子航迹的分支航迹数量未满,新建子航迹的分支航迹(孙航迹),以子航迹的第一帧点迹为航迹的起始点。
8) 子航迹与点迹进行非机动关联成功后更新子航迹,删除其孙航迹。
9) 孙航迹与点迹建立机动关联成功后更新孙航迹。
10) 子航迹和孙航迹每一次更新后进行航迹确认判断,航迹确认后替代父航迹成为主航迹,继承父航迹的属性和批号,被替代父航迹删除,父航迹的其余分支航迹的处理同5)。
2 多假设跟踪实现
2.1 点航关联建立
分支航迹关联通过3个步骤分别对父航迹、子航迹和孙航迹进行机动、非机动关联,建立航迹与点迹的配对:
1) 所有新点迹与所有父航迹、子航迹一一进行非机动关联判断,判断点迹是否在航迹的非机动关联门限范围内,关联成功的点迹与航迹建立非机动点航配对。
2) 所有新点迹与所有父航迹、子航迹、孙航迹一一进行机动关联判断,判断点迹是否在航迹的机动关联门限范围内,关联成功的点迹与航迹建立机动点航配对。
3) 按航迹的分支类型和关联类型分别计算每一个点航配对的联合条件概率,同一类型按条件概率的大小排序。
2.2 点航关联确认
在多目标跟踪和强杂波、虚警环境下,一个点迹可能与多个航迹建立点航配对,一个航迹也可能与多个点迹建立点航配对,点航关联确认判断哪些点航配对是最终有效的。一个点迹或航迹只能被选中一次,如果一个配对中的点迹或航迹已经被其他确认的点航配对选中,该点航配对将被删除。
对点航配对按类型处理的先后顺序如下:父航迹的非机动关联 > 子航迹的非机动关联 > 孙航迹的机动关联>子航迹的机动关联 > 父航迹的机动关联。在每一种点航配对类型中按条件概率从大到小的顺序选中点航配对。选中的点航配对保存供分支航迹更新处理。
2.3 航迹更新处理
航迹更新处理被分支关联确认选中的点航配对,具体实施方案根据分支类型按顺序处理。
1) 处理父航迹的非机动关联配对。取点航配对中的点迹更新航迹。如果航迹有子航迹,断开父航迹与子航迹的隶属关系;如果子航迹自建立后有非机动更新,该子航迹升级为独立的父航迹;该父航迹的其余分支航迹全部删除。
2) 处理子航迹的非机动关联配对。取点航配对中的点迹更新航迹,判断航迹是否可以转为确认航迹。如果航迹转为确认航迹,子航迹继承父航迹的航迹批号和其他航迹属性;删除父航迹,删除其他自建立后无非机动更新的子航迹,自建立后有非机动更新的子航迹升级为独立的父航迹;该父航迹下属的孙航迹全部删除。
3) 处理孙航迹的机动关联配对。取点航配对中的点迹更新航迹,判断航迹是否可以转为确认航迹。如果航迹转为确认航迹,孙航迹继承父航迹的航迹批号和其他航迹属性,父航迹删除,删除该父航迹所有自建立后无非机动更新的子航迹、有非机动更新的子航迹升级为独立的父航迹,删除该父航迹的其余孙航迹。
4) 处理子航迹的机动关联配对。取点航配对中的点迹建立新的孙航迹。
5) 处理父航迹的机动关联配对。取点航配对中的点迹建立新的子航迹。
3 IMM-JPDA算法
一般情况下,目标机动时,机动参数未知,同时在密集目标和密集杂波的环境下,很容易出现虚警和漏报现象。本文算法在建立航迹的多条分支航迹的架构下,点迹与航迹关联时采用交互式多模型联合概率数据互联(IMM-JPDA)算法[1-2,6],该算法将交互多模型(IMM)滤波与联合概率数据互联(JPDA)算法结合,能够得到杂波环境下多目标跟踪的最优解,适合密集回波环境下的机动目标关联判断。
3.1 IMM滤波器
IMM滤波器假定当前时刻的目标按有限个模型进行机动,计算出模型集内各模型对应的后验概率,通过基于各模型更新得到的目标状态与后验概率加权得到目标的状态估计。
一个完整的IMM滤波流程主要有4步:
1) 相互作用
滤波器包含N个模型,计算与每一个模型匹配的滤波器的混合初始条件。模型j在k时刻的初始状态向量为
(1)
相应的协方差为
(2)

2) 卡尔曼滤波
3)多模型概率更新
(4)
(5)

4) 组合估计
状态向量和协方差的最终组合结果为
(6)
(7)
3.2 JPDA关联算法
JPDA基于关联门限对检测区域内的所有可能回波进行评估,寻找每一回波与各目标关联的概率,将它们对目标的修正通过加权的方式融合。该算法基于两个基本假设:每个目标最多只产生一个凝聚点,一个凝聚点最多只来源于一个目标,但是不同目标的波门可能交叉。
联合概率数据互联的目的就是计算每一个量测与其可能的各种源目标相互联的概率。设mk为第k周期的量测数,θjt(k)表示量测j(j=0,1,…,mk)源于目标t(0≤t≤T)的事件,其中θj0(k)表示量测j源于杂波或虚警,Zk表示直到k周期的确认量测的累积集合。定义
βjt(k)=P{θjt(k)|Zk}
(8)
表示第j个量测与目标t互联的概率,并且
(9)
(10)
互联概率的计算是整个JPDA关联算法的关键,计算流程是找出所有满足规则的联合事件,搜索可行的联合事件,计算可行事件的后验概率,得出航迹与量测的概率分量,再归一化获得量测与目标的互联概率。
IMM-JPDA算法采用IMM滤波器。基于交互多模型滤波结果,计算可行事件的后验概率,进而计算出各量测与各目标之间的关联概率和目标的状态更新值、协方差更新值和模型概率更新值。
3.3 多假设分支航迹关联
本文提出的多假设分支跟踪方法是航迹跟踪算法的架构设计,分支航迹设计与IMM-JPDA算法结合使用。点航关联的隶属度和航迹状态的更新结果采用IMM-JPDA关联算法的计算结果。
多假设分支跟踪方法中具体关联类型包括点迹与航迹的非机动关联、点迹与航迹的机动关联、点迹与点迹的非机动关联和点迹与点迹的机动关联。其中点迹与航迹的非机动关联结果用于更新父航迹或子航迹,点迹与航迹的机动关联结果用于更新孙航迹,点迹与点迹的非机动关联结果用于起始建立父航迹,点迹与点迹的机动关联结果用于建立子航迹和孙航迹。
4 多假设分支跟踪性能评估
4.1 实验一 高机动目标跟踪
实验采用仿真数据,场景设置如下:两批目标分别进行“跑道”形和“八字”形运动,运动轨迹如图2所示,目标速度300 m/s,向心加速度4g,数据率10 s。未采用多假设分支跟踪算法时两批目标转弯时都丢失,转弯结束后重新起始。采用该方法后航迹连续。

图2 机动目标运动轨迹
图3为图2中目标1部分航迹的分支状态示意图。根据机动状态变化类型可以分为进入机动和退出机动。
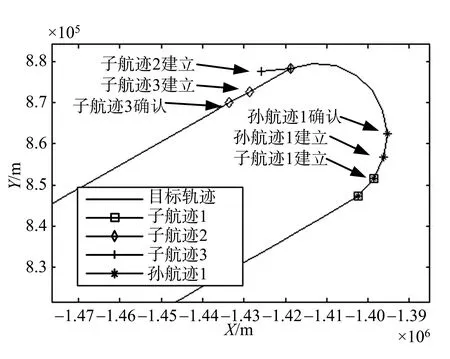
图3 点迹对应分支航迹状态示意图
1) 进入机动
进入机动过程中,子航迹1的第二个点迹与主航迹不符合非机动关联准则,但是符合机动关联准则,因此建立主航迹的分支航迹(子航迹1)。此后探测的点迹与子航迹1不符合非机动关联准则,符合机动关联准则,因此建立子航迹1的分支航迹—孙航迹1。孙航迹1再次更新后按照航迹确认准则判断孙航迹1可以确认,此时孙航迹1替换主航迹,继承主航迹的属性,删除子航迹1和主航迹,原航迹批号由孙航迹1继承,保证系统航迹批号不变。
2) 退出机动
退出机动过程中,子航迹2的第二个点迹量测误差较大,在预测的关联门限范围之外,因此建立主航迹的分支航迹—子航迹2,子航迹3的第二个点迹与子航迹2不符合机动关联准则,但是子航迹3的第二个点迹与主航迹符合机动关联准则,因此子航迹3的第二帧同样与主航迹上的点迹建立主航迹的分支航迹—子航迹3,此时主航迹同时存在两批子航迹。子航迹3再次更新成功后,子航迹3确认,子航迹3替换主航迹,主航迹和子航迹2被删除。
4.2 实验二 目标在杂波区丢点时跟踪
实验数据来源于某次雷达的实际测量数据。如图4所示,目标进入杂波区后连续三次未探测到目标点迹,同时机动关联门限范围内有虚警。未采用此算法前,航迹与虚警错误关联,导致再次探测到目标后无法与原航迹关联,航迹删除后又重新起始。采用本文提出的多假设分支跟踪方法后,航迹丢点后与虚警建立分支航迹,重新探测到目标点迹后,目标点迹与航迹继续关联,分支航迹被删除,目标继续稳定跟踪至观测结束。
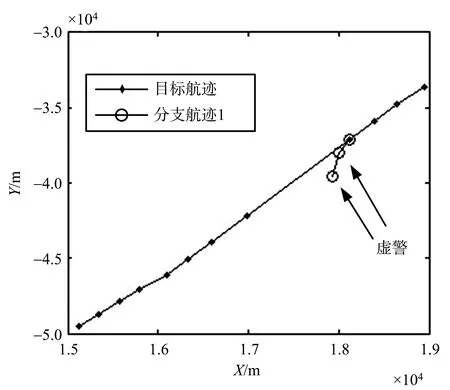
图4 目标在杂波区丢点时跟踪示意图
4.3 实验三 目标机动状态变化时跟踪示意图
实验数据来源于某次雷达的实际测量数据。如图5所示,目标掉头即将完成时,机动状态变化,按照目标可能机动范围建立机动关联门限,机动关联门限内有两个探测点迹可以与航迹建立机动关联,对两个点迹分别建立原航迹的分支航迹。此后接收的探测数据在分支航迹1与分支航迹2的共同门限内,经联合概率数据互联算法计算与分支航迹1的关联概率最大,分支航迹1更新,分支航迹2暂时保留。分支航迹1再次更新后,进行机动航迹确认判断,判定目标状态符合转弯机动规则,分支航迹1确认,分支航迹1替代父航迹成为主航迹,删除分支航迹2,目标稳定跟踪至任务结束。
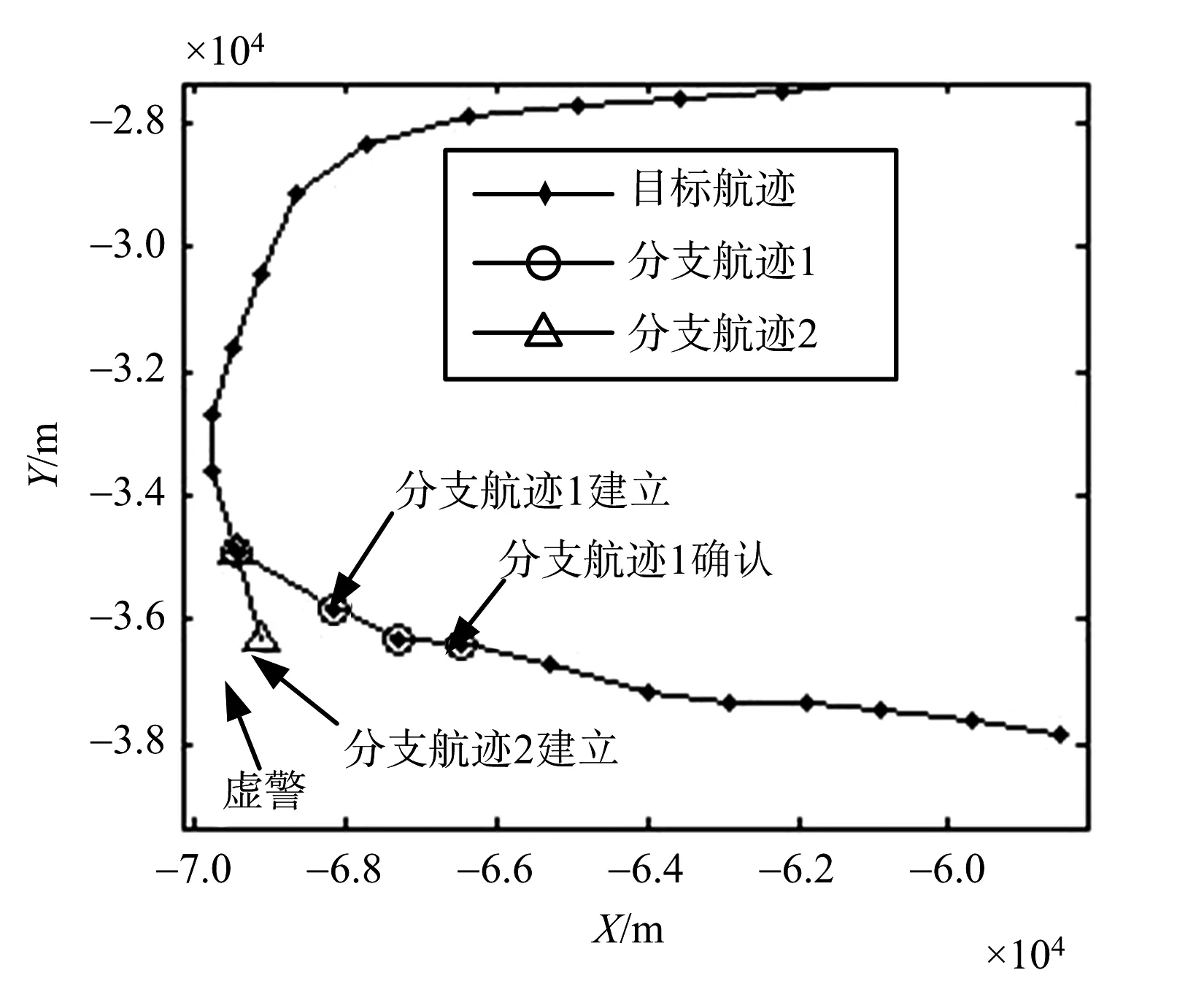
图5 目标机动时跟踪示意图
5 结束语
本文针对杂波、丢点、目标机动等条件下的多目标跟踪问题,提出了一种复杂环境下的多假设分支跟踪方法。该方法采用对原航迹建立机动特性不同的多级分支航迹的方法,结合IMM-JPDA算法进行点航关联判断。从对仿真数据和实测数据的处理结果可以看出,该方法实现了对杂波区目标、机动状态变化目标的稳定跟踪。
猜你喜欢
汽车实用技术(2022年4期)2022-03-07 06:02:26
科学与信息化(2021年30期)2021-12-24 08:00:20
中国西部(2021年4期)2021-11-04 08:57:32
中学物理·高中(2021年3期)2021-06-06 07:25:18
华东师范大学学报(自然科学版)(2020年1期)2020-03-16 03:14:55
火控雷达技术(2019年1期)2019-04-11 06:35:00
电子技术与软件工程(2018年9期)2018-02-25 06:21:08
中国科技博览(2017年31期)2017-09-20 07:56:08
西北工业大学学报(2015年3期)2015-12-14 13:08:44
湖湘论坛(2015年3期)2015-12-01 04:20:17
