改进bang-bang控制的磁流变阻尼钢弹簧浮置板轨道基频的减振效果
2019-08-13 03:18:18韦凯牛澎波赵泽明李怀龙杜香刚
中南大学学报(自然科学版) 2019年7期
韦凯,牛澎波,赵泽明,李怀龙,杜香刚
(1.西南交通大学高速铁路线路工程教育部重点实验室,四川成都,610031;2.西南交通大学土木工程学院,四川成都,610031;3.中国铁道科学研究院高速铁路轨道技术国家重点实验室,北京,100081)
目前,地铁凭借其方便快捷、运量大等优点,已成为众多城市解决交通拥堵问题的主要措施。然而,地铁在给人们出行提供便利的同时,随之产生的振动噪声污染问题也受到了社会各界的关注[1]。目前,我国针对地铁振动噪声污染问题,主要采用扣件减振、轨枕减振和道床减振等轨道减振措施。研究表明,在这些减振轨道型式中,钢弹簧浮置板轨道是整体减振效果最好的轨道结构[2]。国内外学者对钢弹簧浮置板轨道的减振性能以及工程应用现状开展了多方面的研究工作。通过研究发现:浮置板轨道在中/高频的隔振效果比较好,在低频段的减振效果并不理想[3-4]。刘维宁等[5]针对钢弹簧浮置板轨道进行了低频振动特征测试,测试结果表明浮置板轨道结构越低的基频,取得的减振效果越好,然而,振动同样会在基频附近被放大。李俊岭[6]研究分析了钢弹簧浮置板轨道基频振动放大对结构物振动的影响规律,发现浮置板与结构物的基频越接近,结构物的振动反而会增大。吴宗臻等[7]测得地铁浮置板区间地表的振动加速度振动主频为8~10 Hz,与浮置板基频非常相近。韦凯等[8]建立了磁流变阻尼半主动隔振的钢弹簧浮置板轨道型式,为提高钢弹簧浮置板轨道低频的减振效果开辟了新的研究思路。已有研究成果表明,浮置板轨道结构的整体减振效果较好,但其振动在基频的放大现象仍有待解决。为了解决此问题,并降低轨道结构的振动传递到周围环境,本文作者将磁流变阻尼材料应用于钢弹簧浮置板轨道结构,建立磁流变阻尼器隔振钢弹簧浮置板轨道型式。为了研究此轨道型式的可行性和适用性,首先对磁流变阻尼器的动力性能进行测试,然后选用修正的Dahl 模型模拟磁流变阻尼器的力学特征与工作原理[9-11]。基于车辆-轨道耦合动力学理论,并结合改进bang-bang 半主动控制方法,仿真分析地铁车辆-轨道-磁流变阻尼器隔振钢弹簧浮置板轨道垂向耦合系统的动力响应特征,并重点对比引入磁流变阻尼器前后钢弹簧浮置板轨道在基频附近的减振效果。
1 磁流变阻尼器的动力性能测试表征及其控制策略
目前,磁流变阻尼主要应用于汽车、航空、大型土木工程建筑领域,暂无用于地铁轨道结构减振的磁流变阻尼器。本文首先根据轨道交通荷载特征,选出试验测试的磁流变阻尼器,并通过万能试验机对其动力学性能进行试验测试。其次,采用修正的Dahl 模型准确表征磁流变阻尼材料的非线性动力特性,并通过实测结果验证其理论模型的准确性。最后,根据磁流变阻尼器出力特点及浮置板时域位移曲线,选取简单实用,并能有效控制浮置板基频振动的控制策略,为磁流变阻尼器能够进行车-轨耦合动力仿真提供理论基础。
1.1 磁流变阻尼器的动力性能测试
本文选取ZX-MRFD型磁流变阻尼器作为试验对象,该阻尼器设计最大出力为20 kN,设计行程为±20 mm。本次试验利用WAW-1000 型微机控制电液伺服万能试验机对磁流变阻尼器进行动力性能测试。试验测试前,将外接电源接入磁流变阻尼器,以实现通过改变外接电流可测试不同磁流变阻尼器出力情况下的磁流变阻尼力特性。
基于浮置板垂向位移小于3 mm的规定,本次试验采取位移激励方式。为测试不同出力情况下的磁流变阻尼非线性动力特征,本文根据外部激励频率、位移幅值、电流共设置8种工况,如表1所示。激励幅值为1 mm 和幅值2 mm 测得的力-位移曲线与力-速度曲线分别如图1和图2所示。
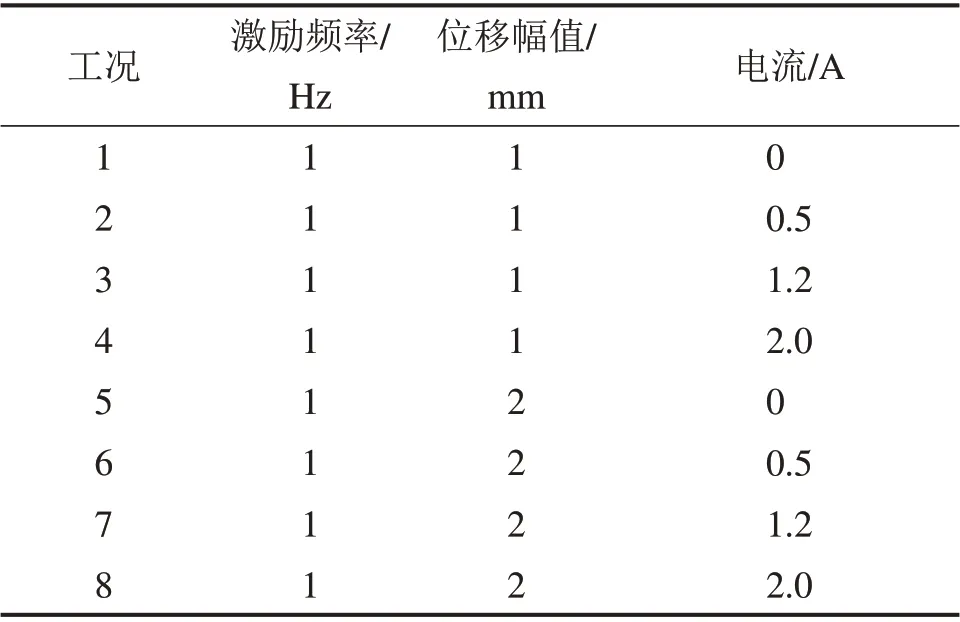
表1 测试工况表Table 1 Test cases

图1 位移幅值1 mm时阻尼力与位移和速度的关系Fig.1 Relationihip among damper force and displacementand velocity when displacement amplitude is 1 mm
根据磁流变阻尼器力-位移曲线与力-速度曲线可以看出:
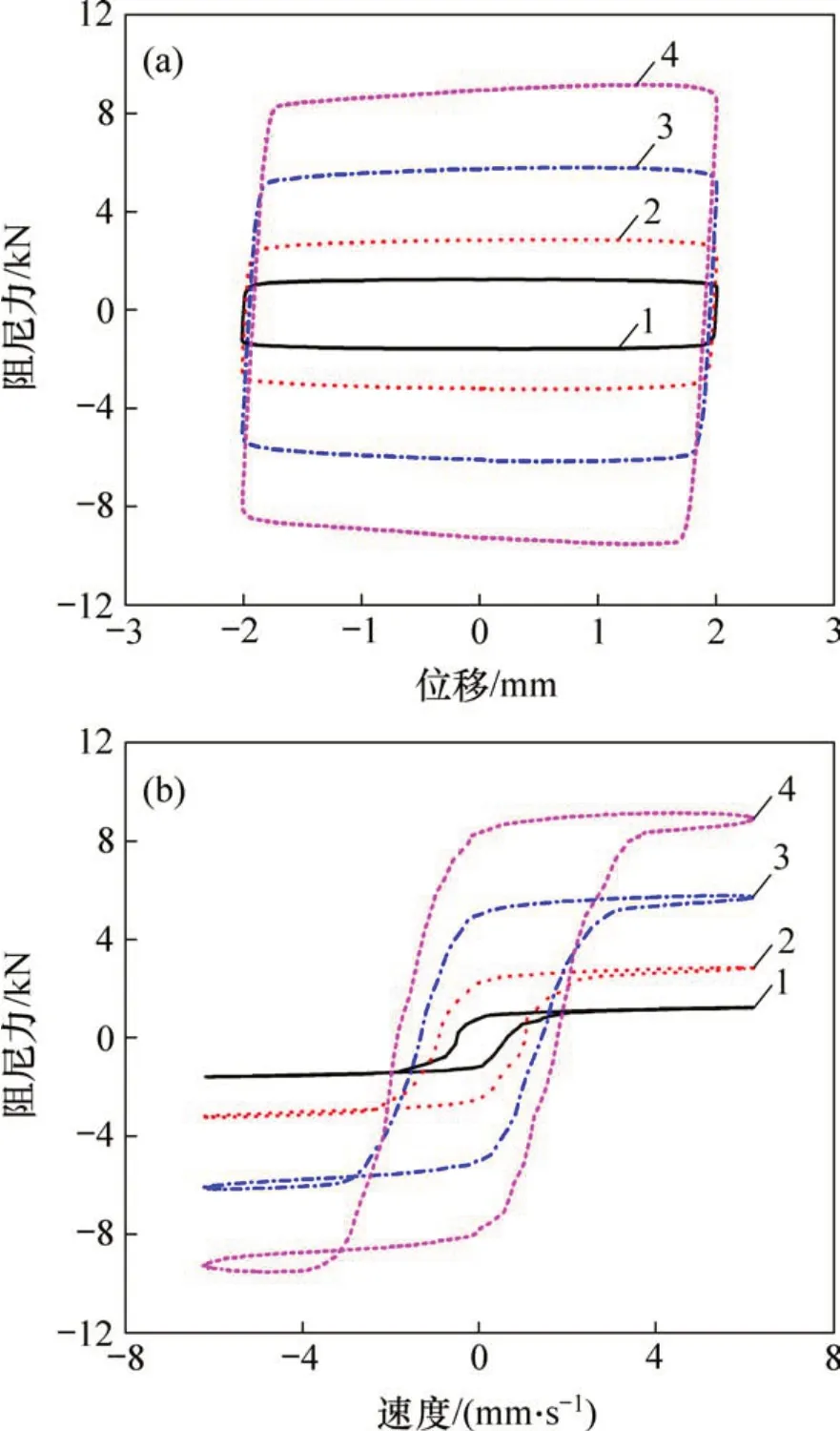
图2 位移幅值2 mm时阻尼力与位移和速度的关系Fig.2 Relationihip among damper force and displacementand velocity when displacement amplitude is 2 mm
1)阻尼力-位移曲线饱满近似矩形,在施加位移激励时,曲线沿顺时针方向循环。在相同的激励条件下,随着磁流变阻尼输入电流增加,磁流变阻尼器输出力的幅值随之增大,阻尼力-位移曲线所包围的面积也逐渐增大,这说明在磁流变阻尼器1个循环周期内所消耗的能量逐渐增大。
2)阻尼力-速度曲线形状近似为对称的双曲线,阻尼力沿上支和下支曲线形状随速度的变化而变化;当速度增大时,阻尼力沿上支和下支曲线增加;当速度减小时,阻尼力沿上支和下支曲线减小。
1.2 磁流变阻尼器的动力学模型及其验证
为了准确反映结构振动中磁流变阻尼的非线性动力性能,首先应建立磁流变阻尼的动力学模型。目前,较为常用的磁流变阻尼力学模型有宾汉姆(Bingham)模型、现象模型(修正的Bouc-Wen 模型)与修正的Dahl 模型等。修正的Dahl 模型与Bingham 模型相比,能准确地模拟磁流变阻尼材料的力-速度的非线性响应。同时,相比修正的Bouc-Wen 模型,其模型所需要确定的动力参数较少,识别难度也相应降低,而且可以准确模拟磁流变阻尼力的滞回特性,有很好的工程适用性[11]。故本文采用修正的Dahl 模型对磁流变阻尼非线性行动力响应进行表征。该模型的结构示意图如图3所示。
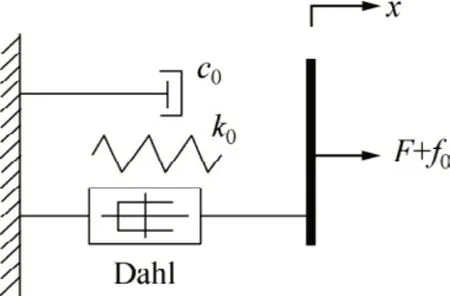
图3 修正的Dahl模型Fig.3 Modified Dahl model
修正的Dahl模型的磁流变阻尼力可以表述为:

式中:k0和c0分别为磁流变阻尼器自身的刚度系数和黏滞阻尼系数;Fd为可控库仑阻尼力;X为阻尼器的位移;f0为初始力;Z为库仑摩擦力的量纲一滞回量;σ为控制滞回曲线的形状参数。
为了验证修正的Dahl 模型的正确性与合理性,首先应识别修正的Dahl 模型动力学参数,再将修正的Dahl 模型的理论拟合曲线与实测曲线进行对比。文献[12]介绍了基于能量法理论对修正的Dahl模型动力参数具体的识别方法。8种测试工况得到的辨识结果如表2所示。下面以第4 组数据为例,将修正的Dahl 模型计算得到的理论值与试验值进行对比,结果如图4所示。从图4可以看出:该理论模型的计算值与试验值能够较好地吻合,说明修正的Dahl 模型能够较准确地模拟磁流变阻尼力的滞回特性。
1.3 磁流变阻尼半主动控制策略
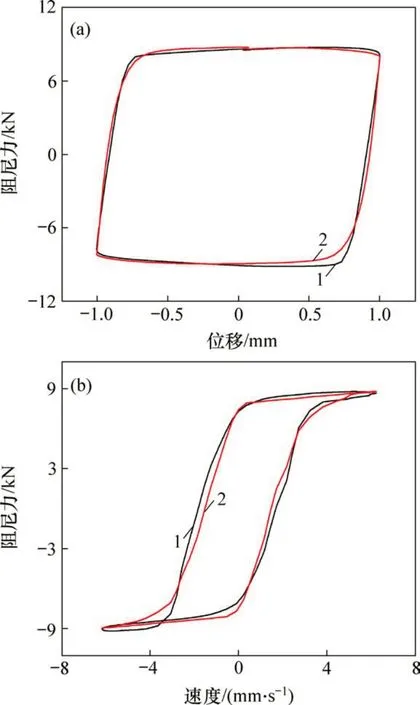
图4 修正的Dahl模型的理论值与试验值比较Fig.4 Comparison of theoretical value and experimental value of modified Dahl model
磁流变阻尼器的半主动控制策略既有被动控制策略不需要外部能量输入的优点,又可以达到主动控制策略的控制效果,被认为是最具前景的结构控制技术之一[9]。目前国内外学者提出或改进的半主动控制策略有很多,本文所用的控制策略为改进的bang-bang控制算法。该算法是在bang-bang 控制的基础上,增加了位移阈值控制,避免了在结构位移较小的情况下,磁流变阻尼器提供较大的阻尼力[10]。该控制方法简单实用,并易于在浮置板轨道结构中实现。改进的bang-bang控制算法可以表示为

表2 修正的Dahl模型辨识参数Table 2 Identification parameters of modified Dahl model
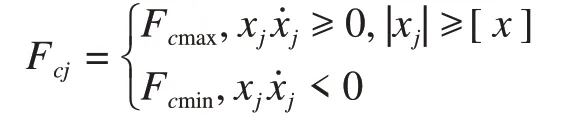
式中:[x]为设定结构的位移限值,其数值由经验确定,本文取0.5 mm。该控制算法表示:当结构位移和速度方向相同(远离平衡位置)且位移超过限值[x]时,磁流变输出最大阻尼力,否则,磁流变施加最小阻尼力。该算法可以使磁流变阻尼器只施加抑制结构振动的力,不能施加使结构振动加剧的力。
2 车辆-轨道-磁流变阻尼器隔振钢弹簧浮置板轨道垂向耦合动力学模型
为了分析列车荷载作用下磁流变阻尼器对地铁钢弹簧浮置板轨道的减振特性,探讨磁流变阻尼器隔振浮置板轨道的垂向振动特征,需要研究建立车辆-轨道-磁流变阻尼器隔振浮置板轨道垂向耦合动力学模型。
2.1 车辆模型
本文采用地铁A型车进行数值仿真分析,将地铁列车简化为10 个自由度、具有两系悬挂的车体垂向模型,具体的参数取值见表3。

表3 地铁A型车的计算参数Table 3 Parameters of“Type A”subway vehicle
2.2 磁流变阻尼隔振浮置板轨道模型
磁流变阻尼器隔振钢弹簧浮置板轨道系统是基于钢弹簧浮置板轨道结构形式,在每个钢弹簧位置处增加1个磁流变阻尼器,垂向模型如图5所示。在仿真分析模型中,钢轨采用离散点支撑的有限长Euler 梁模型,浮置板采用离散点支撑的有限长自由梁模型,扣件系统与钢弹簧隔振器均采用Kelvin-Voigt 模型,磁流变阻尼器采用修正的Dahl模型。在耦合系统中,轮轨垂向力采用Hertz非线性弹性接触理论进行计算,钢轨的振动方程见文献[13]。浮置板轨道系统具体计算参数如表4所示。
在传统轨道板的自由梁模型[14]上,增加了磁流变阻尼的库仑干摩擦元件,因此,轨道板离散点支撑的自由梁垂向振动方程将变为(以向下为正):
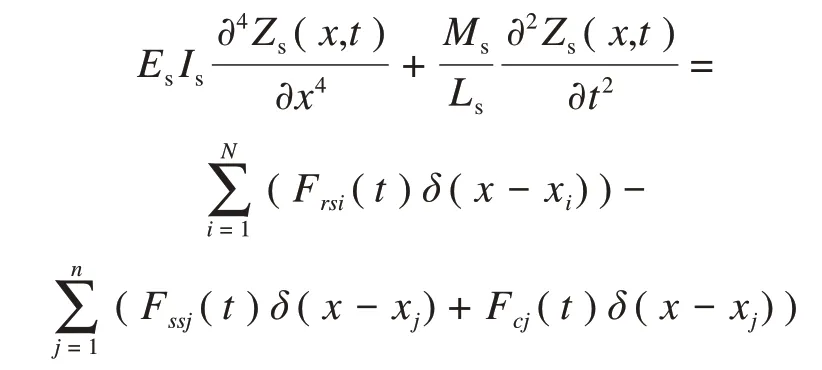
其中:
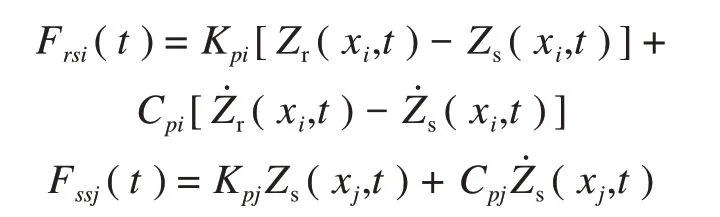
式中:δ为Dirac函数;EsIs为浮置板的抗弯刚度;Ms和Ls分别为单块浮置板的质量和长度;Kpi和Cpi分别为第i个扣件处的垂向刚度和阻尼;Ksj和Csj分别为第j个钢弹簧隔振器的垂向刚度和阻尼;Zr(xi,t)和(xi,t)分别为钢轨和浮置板的垂向振动位移;Zs(xi,t)和分别为钢轨和浮置板的速度;Frsi(t)为第i个扣件处的支点反力;Fssj(t)为第j个钢弹簧隔振器支撑力;Fcj(t)为第j个磁流变阻尼器的出力,由修正的Dahl模型计算得到;N为每块浮置板上的钢轨扣件数量;n为每浮置板下钢弹簧隔振器数量。
钢弹簧隔振器的黏滞系数随着外部荷载频率的增加而减小,在频率增大到结构固有频率附近,其黏滞系数变化幅值不大,因此,本文选用文献[14]中钢弹簧隔振器在固有频率处的测得的阻尼系数,保证计算结果更加合理。
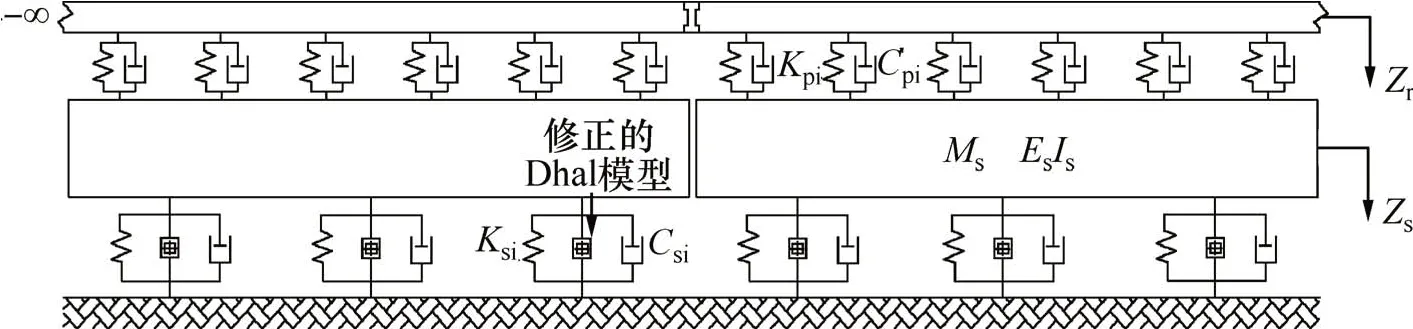
图5 磁流变阻尼隔振浮置板轨道的垂向动力学模型Fig.5 Vertical coupled dynamic model of FST supported by steel spring,viscous damper and MR damper

表4 轨道模型参数Table 4 Parameters of track model
3 磁流变阻尼器隔振钢弹簧浮置板轨道的动力响应分析
本文建立车辆-轨道-磁流变阻尼器隔振钢弹簧浮置板轨道的垂向耦合动力学模型,仿真分析车辆-轨道-磁流变阻尼器隔振钢弹簧浮置板轨道的垂向耦合系统的非线性振动响应特征,从轮轨安全性与轨道减振性能2 个方面综合评价磁流变阻尼器在改进的Bang-Bang半主动控制策略下,对钢弹簧浮置板轨道基频振动的减振效果。
3.1 计算工况
本文模拟列车运营条件是车速为80 km/h,轨道不平顺模拟的美国5 级高低不平顺谱(不平顺波长取0.1~30 m)。具体计算工况如表5所示:工况1为传统钢弹簧浮置板轨道(无磁流变阻尼器);工况1~3 探讨在没有控制策略下,磁流变阻尼器不同出力时对浮置板轨道轮轨安全性和减振效果的影响;工况1,2和4研究磁流变阻尼器隔振钢弹簧浮置板轨道应用半主动控制算法后的减振效果。

表5 计算工况表Table 5 Calculation cases
3.2 磁流变阻尼器对钢弹簧浮置板轨道动力响应的影响分析
通过试算发现,钢弹簧浮置板轨道在引入磁流变阻尼器后对车辆系统垂向振动产生的影响很小,因此,下面将重点分析4种工况下浮置板轨道结构的动力响应。
3.2.1 对轮轨安全性的影响
由于半主动控制策略对磁流变阻尼器的最大出力没有影响,因此,本文只对比工况1~3中钢轨和浮置板的垂向振动位移与轮重减载率,如图6~8所示,以此来评价磁流变阻尼器对浮置板轨道结构安全性的影响。
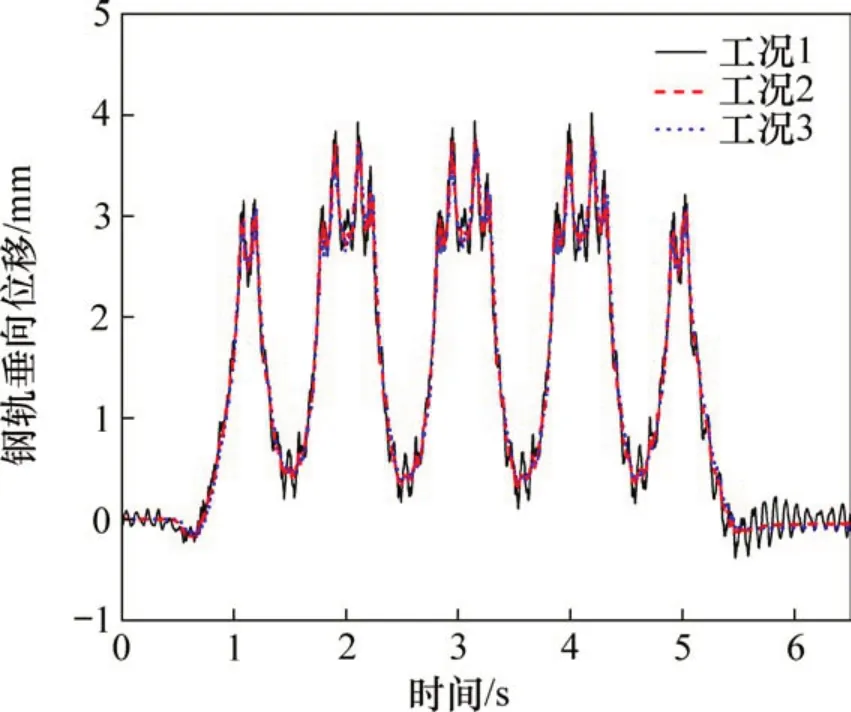
图6 钢轨垂向位移Fig.6 Vertical displacement of rail
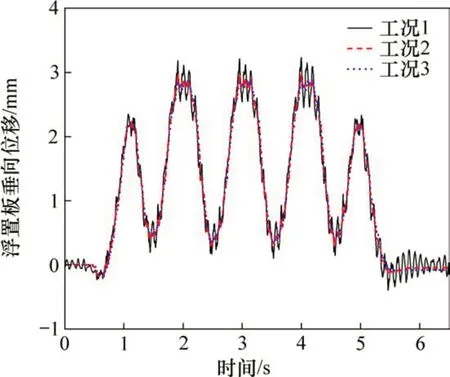
图7 浮置板垂向位移Fig.7 Vertical displacement of floating slab
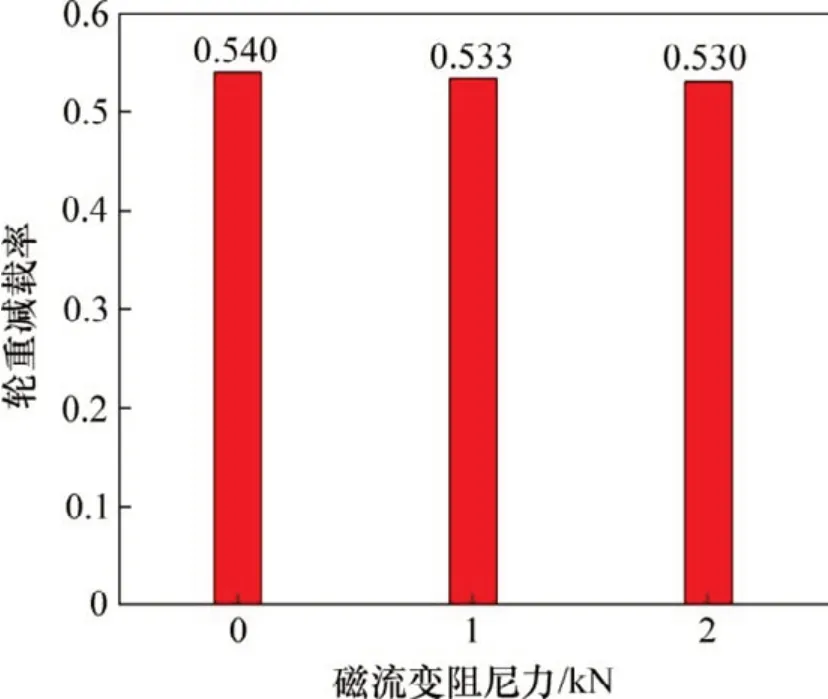
图8 轮重减载率Fig.8 Reduction rate of wheel load
从图6和图7可以看出:磁流变阻尼器对于钢轨和浮置板道床位移最大值影响较小,在磁流变阻尼器输出力为1 kN 和2 kN 时,钢轨最大位移分别减小了0.24 mm 和0.27 mm,浮置板道床最大位移分别减小了0.25 mm 和0.34 mm。磁流变阻尼器对于钢轨和浮置板道床的振动位移有明显的抑制作用,特别是在列车未到和离开时,其振幅有明显减小。轮重减载率见图8。由图8可知:磁流变阻尼器不同出力时对地铁列车的轮重减载率影响不大,维持在0.53左右。
3.2.2 对轨道减振性能的影响
为了分析钢弹簧浮置板在引入磁流变阻尼器后的轨道减振性能,对比工况1~4中浮置板轨道跨中处的支点反力和钢轨垂向振动加速度。由计算结果可知:磁流变阻尼器对浮置板道床振动和支点反力的时/频域响应都有较大的影响。
1) 不同磁流变阻尼力对基频减振效果的影响。工况1,2和3中支点反力时域结果如图9所示。由图9可知:不同磁流变阻尼器出力时对浮置板轨道结构的支点反力最大值无较大影响,但对于支点反力的振幅,磁流变阻尼器有很好的抑制效果,特别是在列车未到和离开的时刻,工况2和3中支点反力的幅值明显降低。
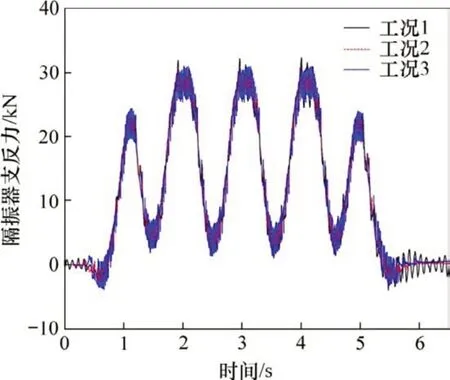
图9 浮置板支点反力时域图Fig.9 Time-domain FST supporting forces
工况1,2和3中支点反力频域结果如图10所示。由图10可知:工况2 和3 相对于工况1,支点反力的有效值在基频10 Hz 处分别降低了71.1%和73.0%。磁流变阻尼器能有效减小支点反力在钢弹簧浮置板轨道基频处的幅值,但随磁流变阻尼器出力的增大,基频减振效果并不明显。另一方面,工况2和3相对于工况1,支点反力有效值在25 Hz 以上频率范围,出现了高频放大现象,并且磁流变阻尼器出力越大,放大现象越明显。

图10 支点反力1/3倍频有效值Fig.10 1/3 octave MSRs of FST supporting forces
2) 半主动控制策略对减振效果的影响。针对磁流变阻尼器隔振钢弹簧浮置板轨道支点反力在中高频范围放大的现象,本文应用改进的bang-bang 控制方法对磁流变阻尼器的出力进行合理的控制。由于控制方法不影响阻尼器的最大出力值,因此,本文只对比了工况1,2和4的支点反力1/3倍频有效值,如图11所示。由图11可知:工况4相对于工况1,支点反力在基频处的有效值降低了62.0%,而且工况4 支点反力在中高频范围并没有出现增大现象。由此可以证明半主动控制的磁流变阻尼器能够有效提高浮置板轨道的减振性能。

图11 浮置板支点反力1/3倍频有效值Fig.11 1/3 octave MSRs of FST supporting forces
磁流变阻尼器隔振钢弹簧浮置板轨道在引入半主动控制前后浮置板道床垂向振动加速度的时/频域响应见图12和图13。由图12和13可知:工况4相比于工况1,浮置板道床垂向振动加速度最大值明显减小;磁流变阻尼器能够降低频率范围在2.5 Hz以上的浮置板道床垂向振动加速度振级,在基频10 Hz处效果最佳,减小了8.6 dB。

图12 浮置板道床垂向振动加速度时域图Fig.12 Vertical vibration acceleration time-domain diagram of floating slab track
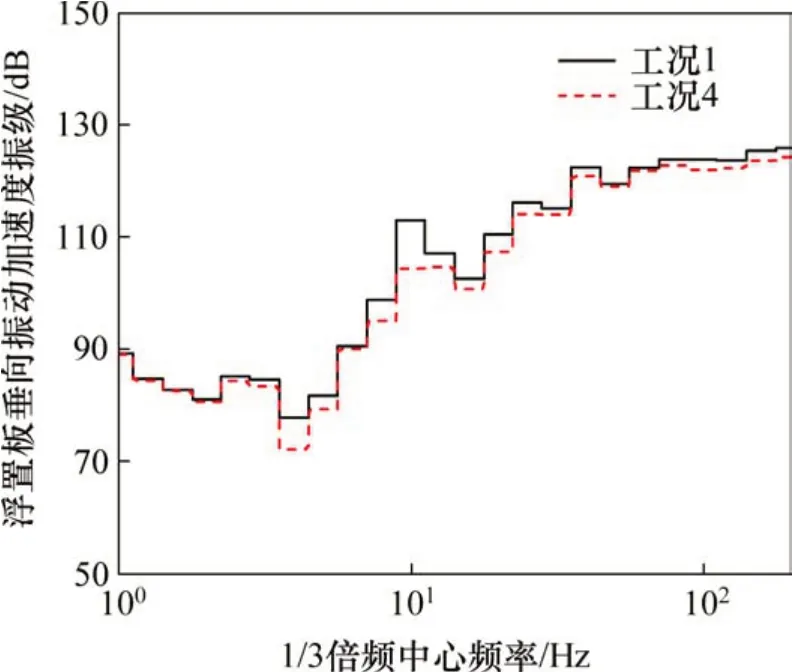
图13 浮置板道床垂向振动加速度振级图Fig.13 Vertical vibration acceleration vibration level diagram of floating slab track
4 结论
1) 应用磁流变阻尼器后,对钢弹簧浮置板轨道的钢轨位移最大值、浮置板位移最大值和轮重减载率基本无影响,满足行车安全规范要求,并有效减小了列车到来和离开时刻钢轨和浮置板道床的振动位移。
2) 磁流变阻尼器能够显著降低钢弹簧浮置板轨道结构基频处的支点反力振幅。当磁流变阻尼器最大出力值从1 kN 增大到2 kN 时,固有频率处支点反力的有效值分别降低了71.1%和73.0%。然而,在中高频范围内,支点反力的有效值反而增大。
3) 半主动控制的磁流变阻尼器可有效降低钢弹簧浮置板轨道结构基频处的支点反力振幅,同时消除了中高频范围振动的放大现象。采用半主动控制且最大出力为1 kN 的磁流变阻尼器,基频处的支点反力有效值降低了62.0%,在中高频范围的支反力有效值未出现放大现象。
4) 半主动控制的磁流变阻尼器可有效降低浮置板道床垂向振动加速度最大值。采用半主动控制且最大出力为1 kN的磁流变阻尼器能够降低1/3倍频程中心频率范围在2.5 Hz以上的浮置板垂向振动加速度振级,并且在基频10 Hz处减少量最大,为8.6 dB。
5) 半主动控制的磁流变阻尼器能够有效提高钢弹簧浮置板轨道基频附近的减振性能,同时减小浮置板轨道上下的振动,吸收轨道系统内部的能量。为了使磁流变阻尼器隔振钢弹簧浮置板轨道适用于地铁的不同运行条件,可参考和改进本文的研究方法,设计磁流变阻尼器的出力和不同种类控制策略,充分发挥磁流变阻尼器的优势。
猜你喜欢
郑州大学学报(工学版)(2023年6期)2023-10-26 08:35:28
疯狂英语·初中天地(2022年9期)2022-08-29 13:58:34
中国人民公安大学学报(自然科学版)(2022年1期)2022-07-20 02:51:14
新疆大学学报(自然科学版)(中英文)(2022年2期)2022-03-27 02:08:08
北京理工大学学报(2020年11期)2020-12-15 04:55:50
山东交通科技(2020年2期)2020-08-13 09:24:06
振动与冲击(2018年19期)2018-10-20 02:13:38
电子制作(2017年20期)2017-04-26 06:57:35
现代城市轨道交通(2015年5期)2015-06-26 02:53:08
噪声与振动控制(2015年4期)2015-01-01 07:07:56