
一种基于态势关联的地图匹配算法*
2019-07-10 07:30滕志军何义昌李昊天滕利鑫
汽车技术 2019年4期
滕志军 何义昌 李昊天 滕利鑫
(东北电力大学,吉林 132012)
主题词:地图匹配 态势关联 态势预测 仿真 航向角差分
1 前言
地图匹配是将车辆行驶轨迹与地理信息系统中的路网相关联的定位修正方法[1]。传统的地图匹配算法包括投影法[2]、概率统计法[3]、曲率积分值方法[4-5]等。投影法计算出定位点与各候选路段的距离度量值,在所有候选路段中,选择距离度量值最小的作为匹配路段[6-7]。概率统计法需要在导航传感器提供的定位点周围定义椭圆形或方形置信区域,如果置信区域内包含多个路段,则采用航向、连通性、速度和距离等标准评估候选路段。基于曲率积分值的地图匹配方法通过计算GPS轨迹相邻轨迹点之间的曲率和候选路段对之间的路径曲率的相似程度进行地图匹配。此外,国内外学者还采用其他算法开展地图匹配,但是这些算法都缺少对车辆轨迹的预测。
本文提出一种基于态势关联的地图匹配算法,首先利用传统的地图匹配算法得到匹配的候选路段,适当缩小匹配搜索范围,然后利用本文提出的匹配算法实现路段匹配,并根据态势关联元素进行参数更新,从而提高位姿估计精度,可增强地图匹配的稳定性,提高车辆行驶过程中的路段匹配精度。
2 基于态势关联的地图匹配算法
在地图匹配中,从时刻t0开始态势关联[8-10],时刻t0前的定位点为历史定位点,时刻t0后关联得到的为态势预测定位点。根据得到的各定位点的航向角和距离等态势元素所组成的集合,利用电子地图数据模板进行关联评估[11]。态势预测时对目标过去的运动状态(包括目标的位置、速度、加速度等)进行平滑关联,对目标的历史运动轨迹进行评估以及对目标的未来运动轨迹进行态势预测[12-13]。在地图匹配中,态势关联主要解决t0时刻后如何更新态势以及对当前态势如何进行推算的问题,同时也为态势评估提供前提条件。图1所示为基于地图匹配的态势关联示意。

图1 基于地图匹配的态势关联示意
车辆行驶到t0时刻,下一个时刻(t1)车辆行驶的路段可能为a、b或者c。如果车辆继续沿与d路段态势相类似的b路段方向行驶,由于惯性导航的影响,车辆的位姿信息不会有太大变化;如果车辆下一时刻行驶在a或c路段,所提供的定位信息的连续性就会较差。在较长的一段时间内,导航定位系统定位精度难于保障,为提高其精度、连续性和鲁棒性,在短时间内识别出交叉路口和多条交叉路口车辆改变方向后的轨迹,利用态势关联预测出的定位点参数和t1时刻定位点参数相关系数的匹配,可以在短时间内将车辆匹配到正确的道路上。
3 态势关联步骤
主要匹配步骤分为3步:首先对确定数据点进行量化,然后对预测点估计数据进行量化,最后通过计算各条候选路段历史定位点和预测定位点的置信度来确定匹配路段的态势评估。
3.1 定位点航向角元素提取
定位点航向角元素的提取步骤为:
a.将t0时刻位置点标定为坐标原点。
b.选出t0时刻前保存在关系型数据库MySQL中的6个历史数据点,并且将其转化到所设定的坐标系下,分别为(x1,y1)、(x2,y2)、(x3,y3)、(x4,y4)、(x5,y5)、(x6,y6)。
从原点起,每两个相邻的点可以求得斜率:

计算出所对应的航向角为θi=arctanki。
c.将电子地图中相邻的几条候选路段各自的定位经纬度坐标转化到步骤a所设定的坐标系中每条候选路段所对应的 7 个点(x7,y7)、(x8,y8)、(x9,y9)、(x10,y10)、(x11,y11)、(x12,y12)、(x13,y13)。
从(x7,y7)起,每两个相邻的点可以求得斜率:

d.利用态势评估模板进行态势关联,即求出车辆t0时刻以后的态势关联的4个时刻在该向量坐标下的坐标数据。以t0时刻为起点,态势关联出的下一时刻的斜率为:

第i个时刻可能的坐标:
式中,θi=arctanki,i=1,2,3,4。
e.分别计算通过态势关联得到的4个坐标点(x1,y1)、(x2,y2)、(x3,y3)、(x4,y4),从原点开始每两个相邻的点可以求得斜率:

f.将相邻的电子地图中几条候选路段各自的定位经纬度坐标转化到步骤a所设定的坐标下。每条对应候选路段所对应的 4 个点(x5,y5)、(x6,y6)、(x7,y7)、(x8,y8),从(x7,y7)开始每两个相邻的点可以求得斜率:

3.2 历史轨迹相关系数
两变量间的相关可以用许多统计值来测量,最常用的是皮尔森相关系数。皮尔森相关系数(Pearson Correlation Coefficient)也称 皮尔森 积矩相关系数(Pearson Product-Moment Correlation Coefficient),是一种线性相关系数,是用来反映两个变量线性相关程度的统计量[14]。历史轨迹相关系数R表示为:

3.3 基于态势关联的航向角参数校准
在导航系统中,电子罗盘可测量航向角,陀螺仪主要测得动态变量(角速度)[15],车辆行驶的速度矢量称为航速,规定航速与正北方向的偏离角为航向角。为了提高匹配精确度,本文提出基于态势关联的航向角关联预测对航向角进行校准。定义基于态势关联的航向角修正系数为Ug,车辆在Δt时间内的历史航向角Δθ和在态势元素提取等时间Δt内预测得到角度Δθy为:

式中,Ug·Δθ为车辆在Δt时间内态势关联对历史航向角的修正角度。
航向角修正系数Ug和态势关联轨迹相关系数R*分别为:
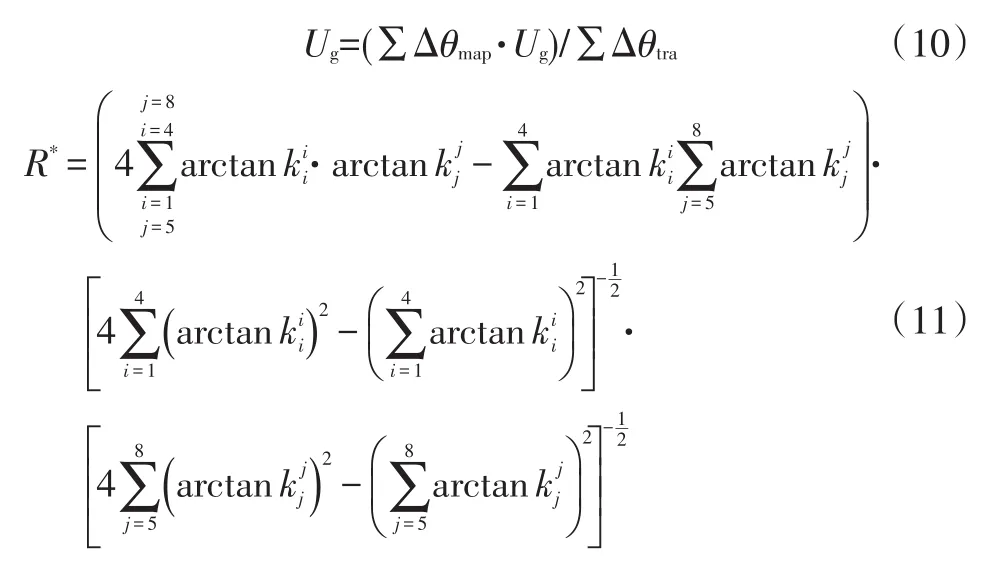
式中,Δθmap、Δθtra和Δθg分别为上一时刻电子地图航向角、轨迹航向角和上一时刻航向角修正系数;为对应的电子地图相邻两点斜率。
根据相邻两个时刻的航向角差分评估该时间段车辆需要匹配的候选路段,通过关联修正系数对航向角进行补偿[16],进一步提高匹配的精度。
3.4 基于态势关联规则的匹配流程
依据态势关联规则,设定相对应的匹配流程如图2所示。
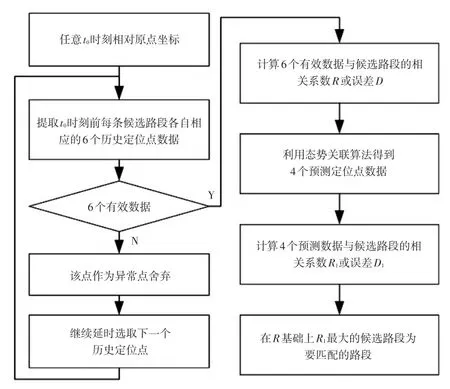
图2 基于态势关联规则的匹配流程图
4 结果与仿真分析
利用Novatel公司的高精度Span/DGPS组合导航系统在东北电力大学校园采集地图信息数据,然后通过与Google卫星图片的匹配对偏离道路的点进行离线修正,生成准确的参考轨迹。图3和图4分别给出了典型匹配点的轨迹图和测试轨迹匹配图。

图3 典型匹配点轨迹

图4 测试轨迹匹配
图5所示为基于经纬度数据态势关联的典型路段匹配效果。图5中,最后路段的误差是长时间的误差累积造成的,此时车辆通过交叉路口进行转弯,车辆容易将定位点置于两条路的中间,导致定位点信息不准确。引用态势关联算法后,车辆在最后交叉路口转弯后,车辆快速将定位信息匹配到了正确路段上,更新后的侧向和纵向最大误差分别为0.7m和3.7m。

图5 态势关联后的典型路段匹配效果图
图6所示为匹配路段上等时间间隔的航向角差分仿真结果。由图6可知,采用态势关联算法得到的匹配效果优势明显,尤其在长时间误差累积阶段,图像趋势凸显尖锐,说明数据更新更快,候选路段匹配度更高。
图7所示为态势关联预测点匹配相关系数仿真结果。由图7可知,态势关联的相关系数大于投影算法相关系数,说明态势关联后的相关性较好。匹配路段负相关系数数据减少,说明匹配的误差减小,匹配精度得到提高。

图6 等时间间隔航向角差分

图7 各时刻定位点相关系数
5 结束语
本文提出了基于电子地图数据和态势关联轨迹特征的地图匹配方法,并以此方法对部分交叉路口进行了匹配。结果表明,该算法匹配精度高,具有较高的鲁棒性。该方法适合交叉路段和平行路段,尤其对交叉路段和分叉路口修正效果更为明显。
猜你喜欢
中国交通信息化(2022年7期)2022-10-27
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
社会科学战线(2022年4期)2022-06-15
今日农业(2022年1期)2022-06-01
汽车与安全(2020年1期)2020-05-14
当代陕西(2019年17期)2019-10-08
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
师道(2018年6期)2018-07-16
