异常情况下电动汽车锂电池SOC估计
2019-07-10 07:30:54杜坚谢聪
汽车技术 2019年4期
杜坚 谢聪
(西南石油大学,成都 610500)
主题词:锂电池 SOC估计 强跟踪卡尔曼滤波
1 前言
对于电动汽车,电池荷电状态SOC反映了汽车当前状态下的续航能力,研究电池荷电状态估计问题,对合理管理电池、确定汽车续航能力具有重要意义。
电池SOC无法直接测量,只能通过测量电池电压、内阻等参数间接估计。电池SOC估计方法分为传统算法和智能算法,传统算法根据开路电压与某一参数的对应关系进行测量,包括开路电压法、内阻法、安时积分法等[1-3]。其中,开路电压法在电池长期静置后才可使用,无法应用于汽车行驶状态;内阻法问题在于内阻难以测量;安时积分法由于使用积分算法而容易产生积累误差。由上述分析可知,传统SOC估计方法限制较多,因此当前SOC估计研究热点集中在基于智能算法的SOC估计方面。智能算法使用算法的群智能性搜索SOC最优估计值,包括神经网络算法、粒子群算法、卡尔曼滤波等[4-6]。
本文针对状态突变、模型不准确、SOC初值误差大等异常情况下SOC估计问题进行研究,提出了基于强跟踪卡尔曼滤波算法的估计方法。仿真结果表明,该方法在以上特殊情况下能够给出高精度的SOC估计值。
2 锂电池模型及参数辨识
2.1 锂电池模型
电池建模要遵循两个原则:一是模型不能太复杂,保证计算量在接受范围内;二是模型能准确模拟电池动静态特性。选用电路模型模拟电池内部状态,常用电路模型包括理想模型、戴维南模型、PNGV模型和双阶RC模型等[7,8]。双阶RC模型将电化学极化过程和浓度极化过程分开表示,与其它电池模型相比具有较高拟合精度,因此选用双阶RC模型,其结构如图1所示。图中Uoc为电池开路电压;R0为电池欧姆内阻,反映电池浓差极化过程,即状态突变后快速反应过程;RdCd回路反映电池电化学极化过程,即状态突变后慢速反应过程;I为电池内部电流;Ut为电池端电压。
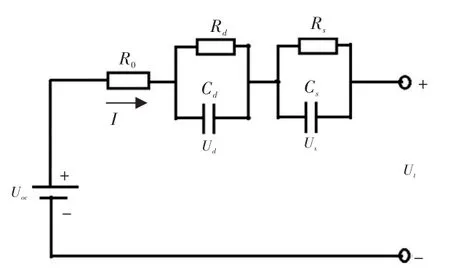
图1 双阶RC模型[8]
锂电池状态空间方程是SOC估计的基础,首先设定锂电池状态向量为:

式中,Us为RsCs回路端电压;Ud为RdCd回路端电压;τs、τd为2个RC回路的时间常数。
则锂电池状态空间方程为:
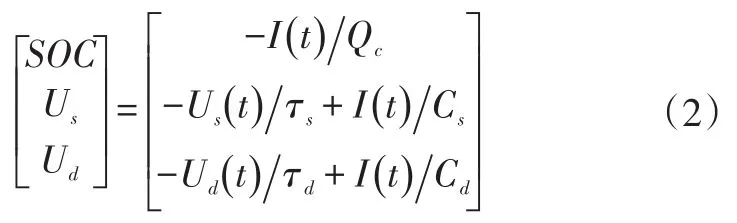
式中,I(t)为电池内部电流;Qc为电池容量;Cs为RsCs回路电容;Cd为RdCd回路电容。
输出方程为:

2.2 模型参数辨识
由图1中双RC模型可知,待辨识参数包括R0、Rs、Rd、Cs、Cd等,当电池SOC值不同时,参数值也不同,因此每隔10%SOC值进行1次参数辨识。由于锂电池具有滞回特性,参数在充电和放电时数值相差较大,因此对充电和放电过程分别进行参数辨识。采用HPPC方法进行参数辨识,为了保证电池状态稳定性,每次试验后将电池静置30min后再进行下次试验。充电和放电过程参数辨识结果如表1和表2所示。
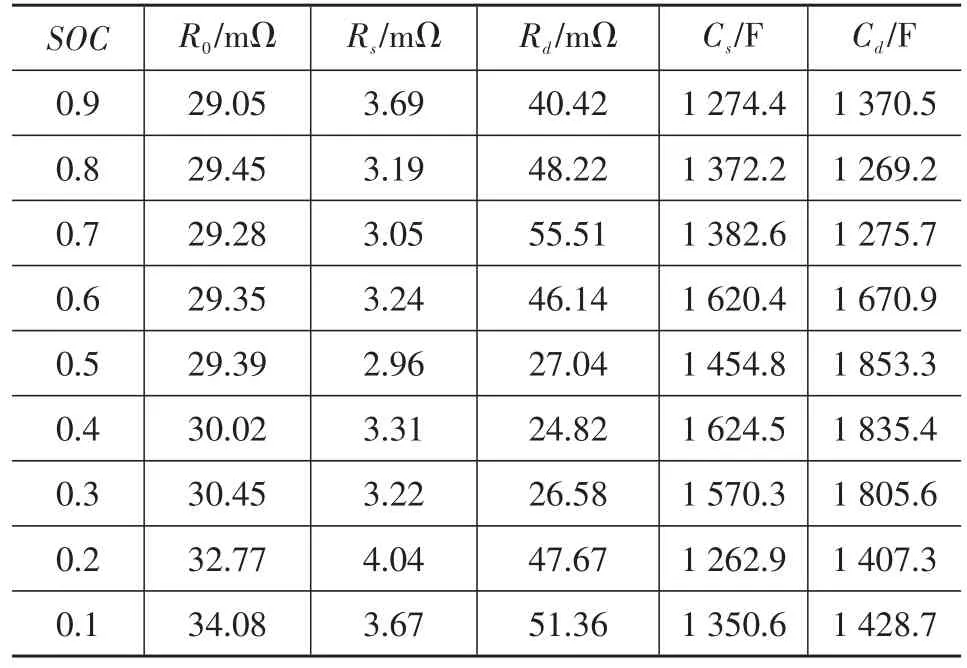
表1 放电过程参数辨识结果
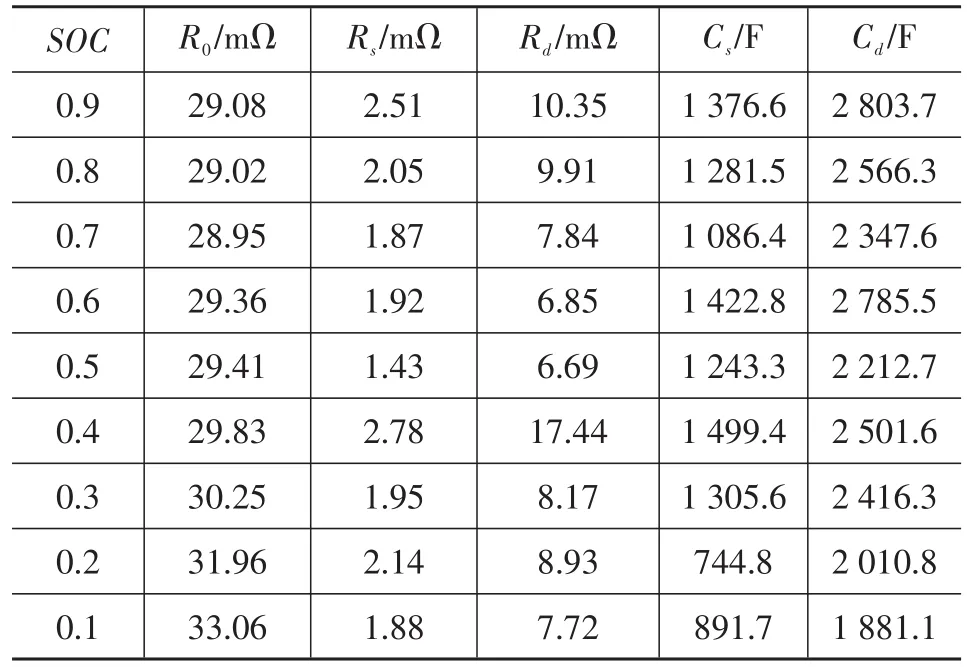
表2 充电过程参数辨识结果
2.3 开路电压-荷电状态关系
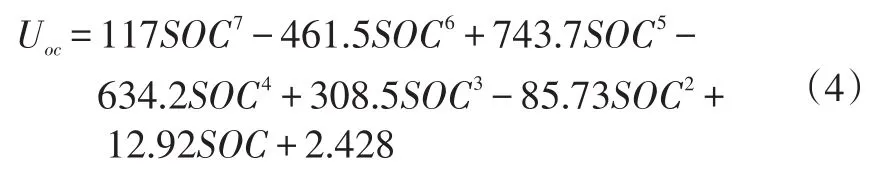
因式(3)中Uoc(SOC)的函数关系未知,所以需要建立Uoc与SOC之间的函数关系。经验证锂电池在充电和放电过程中,Uoc与SOC之间的函数曲线几乎重合,滞回特性表现不明显,因此取充电和放电过程的均值曲线建立函数关系式。利用25℃恒温试验方法进行函数关系辨识,将锂电池在满电状态下静置2 h使状态稳定;然后放电5min,释放电量为1 C;再静置5min使状态稳定,记录静置期间最大开路电压并作为此SOC值时的开路电压。重复以上步骤直至放电完毕,得到不同SOC值时的试验数据,使用多项式拟合Uoc与SOC之间的关系式。
经验证,7阶多项式模型拟合精度比6阶模型拟合精度高一个数量级,8阶多项式模型拟合精度与7阶模型相差不大,因此选用7阶多项式进行拟合,结果如图2所示,Uoc与SOC关系式为:
3 强跟踪卡尔曼滤波算法
3.1 扩展卡尔曼滤波
卡尔曼滤波只适用于线性系统,对于锂电池这种非线性系统,可使用扩展卡尔曼滤波进行状态估计[9]。扩展卡尔曼滤波使用泰勒级数将非线性系统近似为线性系统,再使用卡尔曼滤波估计方法[10]。

图2 Uoc与SOC的拟合曲线
非线性系统状态方程和观测方程为:

式中,f(xk,uk)为状态转移函数;wk为状态噪声;h(xk,uk)为观测函数;vk为观测噪声。
使用泰勒级数将非线性函数f(xk,uk)、h(xk,uk)在处展开,保留零次项和一次项,得

设

则可将式(5)近似为线性系统:

对此线性系统进行卡尔曼滤波估计使用的迭代公式为:
一步状态估计方程:

估计误差协方差矩阵:

修正系数矩阵:

系统状态更新公式:

误差协方差阵更新公式:

对此过程反复迭代就可以对锂电池状态进行实时最优估计,得到锂电池SOC最优估计值。
3.2 强跟踪卡尔曼滤波算法原理
对于电动汽车锂电池SOC估计问题,存在以下异常情况:
a.汽车行驶过程中,由于爬坡、加速、制动等使电池电流、开路电压等状态发生突变;
b.电池模型无法完全模拟电池复杂的内部过程,且电池使用过程中模型参数容易变化,使电池模型与实际状态相差更大;
c.电池SOC初始值难以准确给出,存在较大初值误差等。
对于以上异常情况,需要一种在任何情况下都能够强行使估计残差保持正交,即在任何情况下都能够将残差强行转化为白噪声的滤波方法。基于此,引入时变渐消因子,提出了强跟踪卡尔曼滤波算法。
通过引入估计残差,将扩展卡尔曼滤波算法中系统状态更新公式改写为:

强跟踪卡尔曼滤波的实质是通过设计增益矩阵Lk,使残差γk为高斯序列,即满足:

式(16)表示当电池出现状态突变、模型不准确、SOC初始误差大等异常情况时,状态估计值与实际值会产生较大的残差,通过在线确定增益矩阵Lk,强行使残差相互正交保持高斯特性,保持对系统的精确跟踪;若没有异常情况,上式自然成立,此时强跟踪卡尔曼滤波退化为扩展卡尔曼滤波。
3.3 强跟踪卡尔曼滤波算法实现
分析扩展卡尔曼滤波算法中修正系数矩阵表达式可知,可以通过调节改变修正系数矩阵。为了实现算法的强跟踪特性,引入渐消因子λk减小旧数据在估计值中的权重,即误差协方差矩阵改进为:

可以通过式(16)中的正交公式对式(17)求解,求解方法为梯度法和非线性规划法,但是求解过程复杂、计算量巨大,因此给出次优渐消因子为:
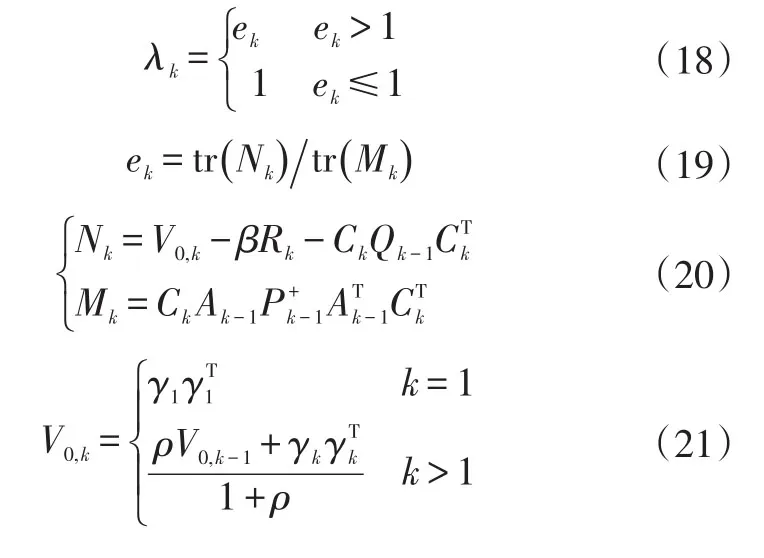
式中,λk为次优渐消因子;tr()为矩阵的秩;V0,k为残差协方差阵;ρ为遗忘因子;β为弱化因子,且β≥1。
将式(17)和式(18)代入到修正系数矩阵公式,得到强跟踪卡尔曼滤波修正系数矩阵。
将锂电池的状态空间方程和观测方程进行离散化处理,即

根据式(22)给出的离散方程、式(18)给出的次优渐消因子计算方法,强跟踪卡尔曼滤波算法使用的迭代公式为:
状态一步估计:

计算观测输出:

误差协方差矩阵:

修正系数矩阵:

系统状态更新公式:

误差协方差矩阵更新公式:

此6个公式反复迭代就实现了锂电池SOC的强跟踪最优估计。
4 仿真验证
设计了两组仿真验证,第1组仿真验证用于验证强跟踪卡尔曼滤波对模型不准确、系统状态突变这两种异常情况下的估计精度;第2组仿真验证用于验证电池SOC初始误差较大情况下的SOC估计精度。
4.1 第1组仿真验证
为验证算法对系统模型不准确和状态突变时的估计精度,在开路电压中加入均值为0.01、方差为0.1的随机噪声,用于模拟模型不准确的情况;同时设计了带有电流突变的充放电试验,用于模拟状态突变。数据采集频率为1 Hz,采集时间共8 320 s,仿真得到的电流、电压曲线如图3所示。

图3 数据采集结果
分别使用扩展卡尔曼滤波和强跟踪卡尔曼滤波算法对电池SOC值进行估计,算法参数设定为:遗忘因子ρ=0.95、弱化因子β=1.2、观测噪声R=0.05、状态初始值x0=[8 0 %,0,0]T、误差协方差矩阵初始值P0=I3×3、状态噪声Q=diag(0 .001,0.1,0.1)。两种算法对电池SOC估计结果如图4所示。
从图4可看出,在系统模型不准确和状态突变的情况下,扩展卡尔曼滤波得到的SOC估计结果波动较大,而强跟踪卡尔曼滤波得到的SOC估计值波动较小。为更加直观比较两个算法的估计结果,对估计误差进行统计,强跟踪卡尔曼滤波的估计误差维持在2%之内,而扩展卡尔曼滤波的最大估计误差达到了4.5%。这是因为当出现模型不准确和状态突变等异常情况时,强跟踪卡尔曼滤波能够及时调整修正系数矩阵,使残差成为白噪声序列,确保估计值的最优;而扩展卡尔曼滤波的非线性误差、状态突变误差、模型不准确误差相互叠加,使估计误差较大。
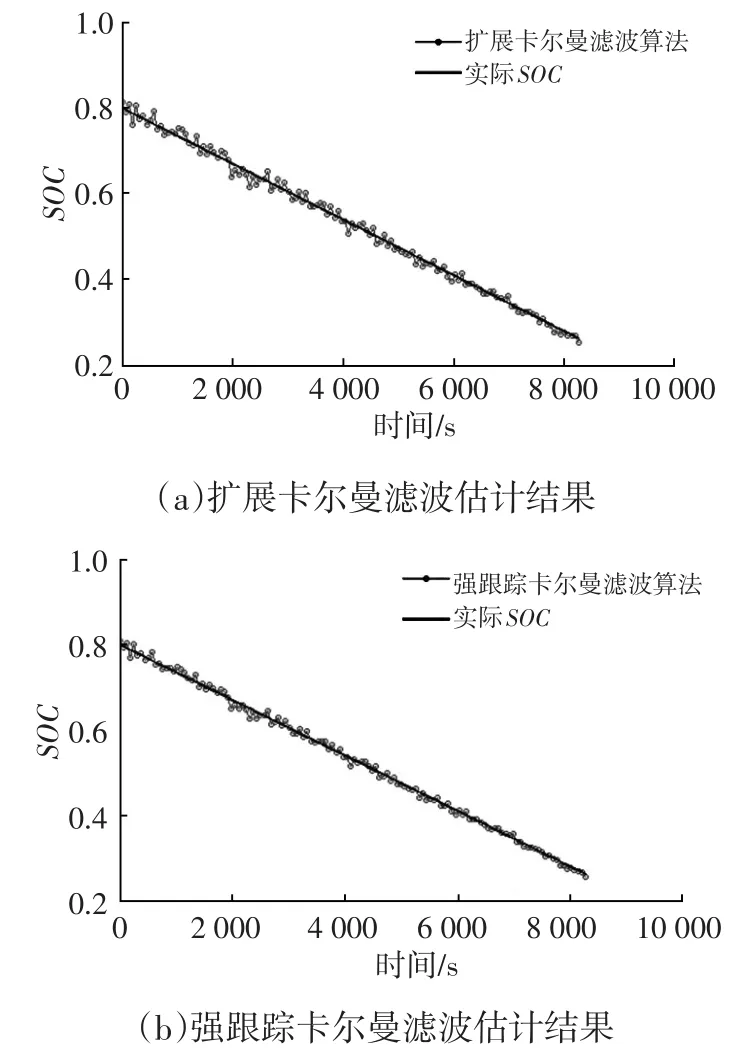
图4 两种算法的SOC估计结果
4.2 第2组仿真验证
第2组仿真验证的目的是验证电池SOC初始误差较大时估计精度问题。根据式(4)可以准确计算出SOC初始值,但是测量开路电压时,要求电池静置0.5 h以上,这一条件在汽车使用过程中难以满足,所以多数情况下电池SOC初始值难以计算。仿真时设置电池SOC真值为80.5%,为了验证算法对初始误差的估计精度,将SOC初始值设置为40%,分别使用扩展卡尔曼滤波和强跟踪卡尔曼滤波对电池SOC进行估计,算法参数与第1组仿真一致。为了更加清晰地比较两算法对初始误差的修正速度,给出了前50个数据的估计结果,如图5所示。

图5 前50数据估计结果(放大图)
从图5可看出,两种算法最终都可以收敛到真值,但是强跟踪卡尔曼滤波算法在15 s内就收敛至真值附近,而扩展卡尔曼滤波在40 s时才收敛到真值附近,这充分说明强跟踪卡尔曼滤波应对SOC初始误差时具有更快的收敛速度。这是因为强跟踪卡尔曼滤波的修正系数矩阵能够依据异常情况自适应地调整,使SOC估计值快速向真值靠拢。
5 结束语
建立了锂电池的双RC等效电路模型,在分析扩展卡尔曼滤波基础上,提出了强跟踪卡尔曼滤波算法。通过仿真验证表明,所提出的强跟踪卡尔曼滤波算法对状态突变、模型不准确、SOC初始误差等异常情况时的估计精度和收敛速度明显优于扩展卡尔曼滤波。因此通过调整增益矩阵,强行使残差正交,可以使强跟踪卡尔曼滤波算法应对异常情况时,SOC估计精度依然很高。
猜你喜欢
网络安全与数据管理(2022年3期)2022-05-23 13:26:48
北京航空航天大学学报(2020年10期)2020-11-14 09:26:02
自动化学报(2019年6期)2019-07-23 01:18:32
北京航空航天大学学报(2017年9期)2017-12-18 07:12:25
电源技术(2016年9期)2016-02-27 09:05:39
电源技术(2016年2期)2016-02-27 09:04:52
电源技术(2015年1期)2015-08-22 11:16:28
电源技术(2015年7期)2015-08-22 08:48:22
河南科技(2015年8期)2015-03-11 16:23:52
电子设计工程(2014年6期)2014-02-27 11:56:54