
轮毂电机不平衡径向力导致的整车振动研究进展*
2019-07-10 07:30王艳阳杨馥宁商福兴
汽车技术 2019年4期
王艳阳 杨馥宁 商福兴
(1.西华大学,汽车与交通学院,成都 610039;2.西华大学,汽车工程四川省高校重点实验室,成都 610039)
主题词:开关磁阻电机 不平衡径向力 轮毂驱动 整车振动 振动控制
1 前言
轮毂驱动式电动汽车的驱动电机布置在轮毂内,其结构紧凑、传动链短,方便应用线控技术,在电动汽车的发展中受到越来越多的关注[1-4]。轮毂电机作为轮毂驱动电动汽车的关键驱动部件,其性能直接决定了车辆的动力学性能,而开关磁阻电机启动扭矩大、调速范围宽、能量转换效率高,能较好地满足轮毂电动车的要求,因而在电动车上的应用受到重视[5-8]。然而,由于开关磁阻电机的振动问题使电动车平顺性与操纵稳定性的矛盾激化,影响了车辆的舒适性和安全性,这也是其没有被广泛接受的主要原因之一[9-10]。造成开关磁阻电机振动的一个主要因素是电机的不平衡径向力[11-13]。由于不平衡径向力不经减振而直接作用在车轮上,不但会恶化电机的工作环境、降低其疲劳寿命,而且会增大轮胎动载荷,降低其抓地附着能力,增加汽车的侧翻风险。较差的平顺性会降低驾驶员的疲劳极限,影响行驶安全,而过大的轮胎动载荷会造成轮胎故障甚至爆胎,另外,汽车侧翻也是一种严重的交通事故。
针对上述问题,本文通过对国内外开关磁阻电机振动问题的研究进行综述,重点分析开关磁阻轮毂电机不平衡径向力导致的整车振动问题,以期进一步明确开关磁阻轮毂电机噪声和振动的产生机理及其控制方法,为解决开关磁阻电机不平衡径向力导致的电动汽车平顺性与操纵稳定性矛盾恶化的问题提出合理的解决思路,并对有待进一步解决的问题进行讨论,对未来的研究方向进行展望。
2 电机振动和噪声的产生因素及机理
电机振动与噪声的主要来源包括3个方面:机械噪声、空气噪声和电磁噪声[14-16]。机械噪声主要是指轴承噪声、碳刷与集电环境摩擦产生的噪声以及转子不平衡产生的噪声。针对机械噪声需要提高轴承加工精度,减小安装误差,进行严格的动平衡校验,采用牢固的碳刷座结构等方法予以控制。空气噪声主要是由于风扇转动,使空气流动、撞击、摩擦而产生的。对于空气噪声的抑制,需要通过风叶和风扇的结构设计降低空气涡流,使风路畅通,减小空气的撞击和摩擦,或者采用隔声或吸声材料。电磁噪声是指作用在电机定、转子空气隙中的交变电磁力导致的电机定、转子振动及噪声。电磁力包括径向分量和切向分量两个部分。电磁力径向分量在引起电机振动及噪声方面起主要作用,它使定子铁心产生径向振动,径向振动产生的噪声为电机电磁噪声的主要成分。而在电机气隙存在偏心的情况下,电机不平衡径向力将会进一步加剧电机振动。在工程应用中,由于轴向载荷、加工误差等原因,开关磁阻电机的气隙偏心率可高达10%[17-18]。而在实际运行工况中,受外界激励、摩擦力等因素影响,电机的相对偏心率甚至可达30%~60%[19-20]。因此,本文重点研究开关磁阻电机不平衡径向力所导致的电机与轮毂驱动电动车的耦合振动及其抑制方法。
美国学者Cameron D E及其研究团队于1992年系统研究了开关磁阻电机的振动和噪声产生机理,明确指出由电机的定子与转子间的径向磁拉力导致的定子径向形变是电机振动和噪声的主要来源。而且,当定子径向形变频率与定子固有频率接近一致时会导致非常严重的振动和噪声[11]。同时,文献[21]、文献[22]的研究也表明,由气隙偏心造成的开关磁阻电机不平衡径向力和扭矩波动是导致电机振动和噪声的主要因素。
为了研究气隙偏心导致的不平衡径向力,美国学者Iqbal Husain等人采用解析的方法推导出一种开关磁阻电机不平衡径向力的计算公式[23]。文献[9]、文献[24]则预测了开关磁阻轮毂电机的噪声辐射。韩国学者Ha K H、Hong JP等人采用有限元分析方法从转子-轴承系统的角度分析了开关磁阻电机不平衡径向力导致的转子振动轨迹,并对转子振动的稳定性进行了估计[25]。研究结果表明,在电机气隙静态偏心为10μm、不平衡力矩为10 g·mm的工况下,开关磁阻电机不平衡径向力作用下电机转子的径向运动轨迹长度最高可达60μm,轴向振动最高可达40μm。
上述工作以研究电机本身的振动机理为主,对开关磁阻电机作为轮毂电机的振动特性研究较少。在车辆实际运行工况中,路面激励会导致电机定子和转子的振动,从而导致气隙偏心。而气隙偏心会产生电机不平衡径向力,不平衡径向力又加剧了定子和转子的振动,从而使气隙偏心恶化。因此,路面激励、气隙偏心和电机不平衡径向力相互耦合。这种复杂的机电磁耦合作用会产生较大的电机不平衡径向力。不平衡径向力不经减振直接作用在车轮上,会导致车轮和车身的振动,车轮和车身的振动又直接影响轮毂电机的振动,三者相互耦合。把开关磁阻电机从车辆行驶工况中孤立出来,单独研究其振动机理,无法准确反映电机的实际振动特性,更无法进一步探求电机、车轮和车身系统间的机电耦合振动机理。
3 车轮与电机耦合振动的关系及其频率特性
汽车在行驶时,开关磁阻电机不平衡径向力直接作用在轮毂上,影响整车的舒适性和安全性。文献[26]、文献[27]分析了开关磁阻电机不平衡径向力对车辆舒适性的影响,明确了路面激励、电机气隙偏心、不平衡径向力与车轮振动的耦合关系,如图1所示。

图1 路面、车轮与电机的耦合振动关系[26]
文献[26]建立了包含车轮、悬架和转向子系统的轮毂驱动电动汽车整车动力学模型,初步探索了开关磁阻电机不平衡径向力对车辆舒适性和稳定性的影响。其模型原理如图2所示。考虑到电机不平衡径向力Fv作用于电机转子和定子之间,根据车轮各部件与转子和定子的机械连接关系,将其简化为两部分质量:旋转组件质量mu(转子、轮胎、轮毂和制动盘等)和非旋转组件质量mus(定子、电机壳体、支撑轴和制动钳等),中间由轮毂轴承相连接,建立车轮质量-弹簧模型。电机定、转子之间的气隙偏心则为旋转组件和非旋转组件之间的相对位移,由此产生的电机不平衡径向力作用在车轮旋转组件和非旋转组件之间,其车辆频率响应如图3所示。由图3可见,在开关磁阻电机垂向激励下,整车的簧载质量、侧倾角和俯仰角的响应峰值约在1.2 Hz处,而轮胎跳动的响应峰值约在6.5Hz处。因此,电机垂向激励可以导致车身侧倾运动和轮胎跳动的共振,整车的稳定性和安全性降低。由开关磁阻电机垂向激励引起的共振问题有必要深入研究。
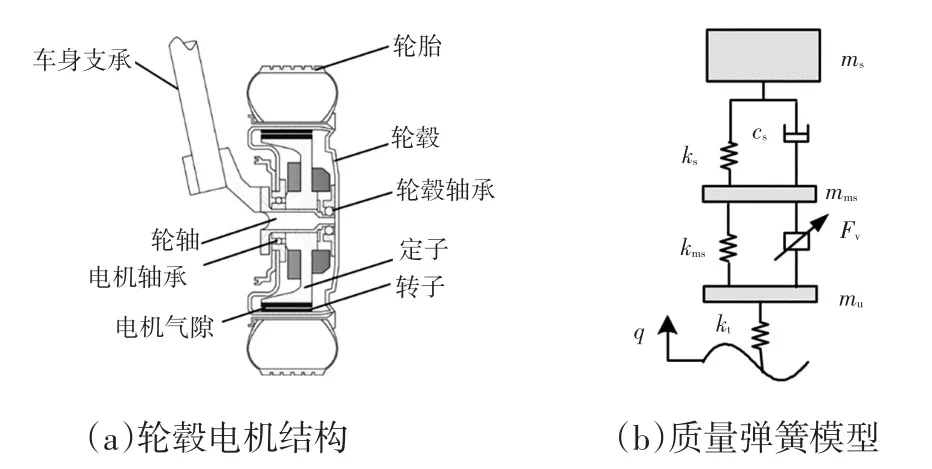
图2 轮毂电机及其质量弹簧模型[26]
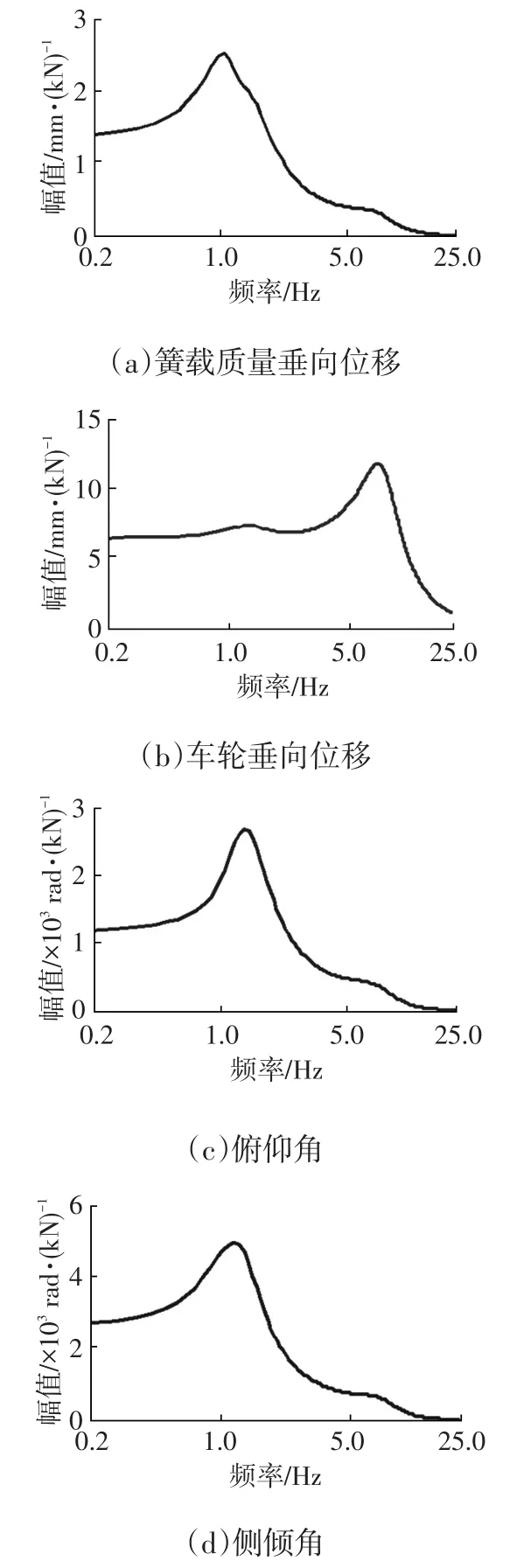
图3 车辆在电机垂向激励下的幅值响应[26]
4 车轮与电机耦合振动对整车性能的影响
在上述研究的基础上,文献[26]在假定开关磁阻轮毂电机偏心率为10%的情况下,研究了不平衡径向力对车辆安全性的影响。车速为60 km/h时,开关磁阻电机不平衡径向力超过3 kN,如图4所示。图5所示为车辆侧翻因子(Rollover Critical Factor,RCF)在考虑和不考虑电机不平衡径向力两种工况下,对鱼钩转向的时域响应。由图5可见,在不平衡径向力激励下,车辆的侧翻因子增大17.80%。该结果表明,开关磁阻电机不平衡力降低了车辆的侧向稳定性和防侧翻特性。

图4 开关磁阻电机不平衡径向力[26]

图5 车辆侧翻因子对鱼钩转向的时域响应[26]
文献[27]在随机路面工况下,研究了开关磁阻电机不平衡径向力对车辆舒适性、行驶安全性和电机安全性的影响,如表1所示。研究表明,在考虑电机不平衡径向力的情况下(Case2、Case4)电机气隙、车身垂向加速度和轮胎动载荷都有一定程度的提高。该结果表明电机不平衡径向力会降低车辆的舒适性、行车安全性和电机的安全性。

表1 车辆振动分析工况表[27]
5 不平衡径向力导致的电机振动和噪声的控制
5.1 传统控制方法
传统的电机振动和噪声控制研究主要包括电机本体结构的测试、优化及电机控制器的优化两个方面。
在电机本体结构的测试、优化方面,主要借助于理论计算和试验分析,研究电机的结构参数对其振动特性的影响,明确电机的结构参数,降低电机本体的振动和噪声。美国学者Garrigan及其研究团队,深入分析了开关磁阻电机径向力的静态特性,给出了电机径向力的预测模型[28]。研究结果表明,并联绕组下电机径向力远低于串联绕组下的径向力,因此,可以通过改变绕组方式控制电机振动和噪声。韩国学者Yang H Y等人通过改变转子的几何结构来降低扭矩波动[29]。文献[30]~文献[32]也针对电机的振动在电机本体结构的优化上开展了相关研究。东北大学张义民教授的科研团队在不考虑路面激励的情况下分析了开关磁阻电机径向力对电动车舒适性和安全性的影响[33-34]。清华大学马噢、李建秋教授的研究团队对评定开关磁阻电机振动特性的两种激励方法进行了比较研究。同时,香港理工大学的Xue X D和Cheng KW E等学者、哈尔滨工业大学赵桂范教授和江苏大学的江晖、赵德安教授的研究团队也在这方面开展了大量的研究工作,取得了丰硕的成果[35-38]。
在电机控制器的优化方面,可运用合适的控制算法,优化电机控制电流、导通角度等控制参数,以抑制开关磁阻电机不平衡径向力及其电机振动。美国学者Iqbal Husain等人早在1996年就提出通过脉冲宽度调制(PulseWidth Modulation,PWM)方法实现开关磁阻电机的最小扭矩波动控制[39]。日本Aisin Seiki公司的Hiroyuki Inagaki等人采用2自由度的H∞控制算法设计开关磁阻电机控制器,用于抑制电机扭矩波动和不平衡径向力引起的电动车传动系统的振动[40],控制框图如图6所示。

图6 开关磁阻电机2自由度H∞控制框图[40]
华中科技大学詹琼华教授及其科研团队较早研究了电动车用开关磁阻电机的设计及控制系统的关键技术,取得了一系列的研究成果,如文献[41]研究了开关磁阻电机的定子振动模态,指出加固绕组和采用周向散热筋结构有利于降低电机噪声,文献[42]则对低转矩脉动、低噪声的开关磁阻电机控制器进行了研究,文献[43]~文献[45]也针对电机的振动对控制器进行了优化设计。图7所示为詹琼华团队研制的开关磁阻电机驱动的电动汽车。
上述工作主要通过改进电机的本体结构和优化电机控制器来抑制电机的振动,而把开关磁阻电机作为轮毂电机纳入整车系统,从整车系统的角度考虑电机振动的影响及其控制的研究较少。开关磁阻电机作为电动车的关键驱动部件直接安装在车轮上,电机和车轮一体转动,不仅受到路面激励和不平衡载荷等因素的影响,而且怠速运行以及启停工况频繁,运行工况复杂。电机的振动一方面会直接引起车轮的振动,增大轮胎动载荷,降低附着能力,增加汽车侧翻风险,另一方面会直接通过悬架系统传递给车身,影响行驶平顺性。而割裂电机与车身和车轮的耦合振动关系,单独研究电机的振动影响及控制方法,无法从整车系统层面提高轮毂驱动电动汽车的平顺性和操纵稳定性。

图7 开关磁阻电机驱动电动车[41]
5.2 针对电机驱动系统的特殊减振系统
由于轮毂电机的引入,整车的非簧载质量会显著增加,进而使车轮转动惯量显著增加。轮胎载荷增大,一方面会降低整车的行驶安全性,另一方面会影响整车的加速性能。针对非簧载质量增加这一问题,文献[46]~文献[49]分析了悬架结构的非线性特性对轮边驱动电动车的影响。研究结果表明,轮毂电机的引入会增加整车非簧载质量(约15 kg),不仅影响车轮行驶安全性,而且会降低整车平顺性。为了降低整车非簧载质量,文献[48]提出了一种动态吸振形式的轮边驱动系统,通过在转向节上加装动力吸振器,将电机质量转换为吸振器质量,不仅可以直接降低非簧载质量,还可以利用分离出来的电机质量进行吸振。文献[50]将定子做成中空,通过减振装置分别与轮轴和车身相连,使轮毂电机的定子质量由非簧载质量转移至簧载质量,同时通过系统参数优化,降低轮胎动载荷的同时提高了车辆的平顺性。文献[51]通过引入万向节,也达到降低非簧载质量的目的。上述工作的基本思路是将轮毂电机的一部份质量抽离出来作为减振器的质量,从而降低整车非簧载质量。
5.3 借助新型悬架的控制方法
随着轮毂电机和新型悬架技术的发展,轮边驱动结构集成了越来越多的功能。法国米其林公司率先提出了“主动轮”技术。该技术将转向、制动和悬架功能集成到轮毂电机中(见图8),用车轮内置悬架代替传统车上的机械悬架,为有效解决轮毂电机振动导致的汽车舒适性、安全性问题提供了新思路。

图8 米其林主动轮系统
文献[52]提出了一种由双电机构成的特殊轮边驱动结构,如图9所示。当两个电机驱动力方向不同时,双电机结构会产生垂直分量,直接用于驱动悬架降低或者升高,从而实现悬架的主动控制;当两个电机驱动力方向相同时,其输出直接用于车辆驱动。

图9 克莱姆森大学的主动轮原理方案[52]
Mingchun Liu及其研究团队采用主动悬架结合电机可调阻尼器的方法,通过模糊PID和最优控制实现电机和整车的振动主动控制[53]。图10所示为其轮毂电机可调阻尼器及悬架结构,图11所示为其相应的控制策略框图。

图10 轮毂电机可调阻尼器及悬架结构[53]
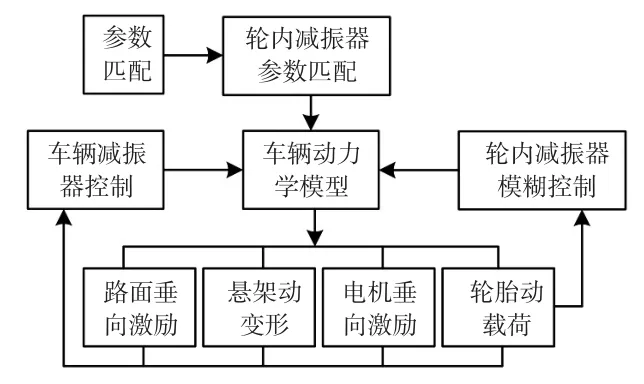
图11 整车综合控制策略[53]
此外,Massimo C及其研究团队针对轮毂电机的跳动问题,进行了悬架匹配设计和电机应力强度方面的研究[54]。文献[55]、文献[56]从电机、车轮和车身的机电耦合方面分析了开关磁阻轮毂电机不平衡径向力对车辆舒适性和安全性的影响,并借助电磁主动悬架抑制电机不平衡径向力,提高车辆的舒适性和安全性。
综上所述,新型悬架技术是一种从电机、车轮和车身耦合振动的全新角度系统考虑电机振动对车辆平顺性和操纵稳定性的影响及控制的新方法,为解决由电机不平衡径向力导致的整车平顺性和操纵稳定性恶化的问题提供了新思路。在车辆实际运行工况中,由于电机和轮胎的非线性特性及路面激励的随机特性,电机、车轮和车身系统表现出复杂的耦合关系,使得这类机电振动问题的研究相对困难,因此研究者较少。
6 存在的问题及发展趋势
开关磁阻电机在轮毂驱动电动车上有着广阔的应用前景,尽管国内外对开关磁阻电机的振动和噪声产生机理及其控制的研究取得了很大的进展,但目前尚存在几个方面的问题有待进一步解决:
a.开关磁阻电机不平衡径向力的计算研究。开关磁阻电机具有机电磁多场强耦合特性,其不平衡径向力受电机气隙偏心、定转子重合角、磁场饱和特性以及扭矩波动等多种非线性因素的影响。而开关磁阻电机作为轮毂电机时,路面激励及频繁的怠速、启动工况又加剧了上述因素的影响。
b.不平衡径向力对电动汽车平顺性和操纵稳定性的影响特性分析。如何明确不平衡径向力与路面激励、气隙偏心等关键参数的耦合度和相互影响关系,探求电机、车轮和车身耦合振动机理,是开关磁阻轮毂电机研究的关键问题。
c.借助新型悬架技术抑制电机不平衡径向力、控制电机振动的研究。通过本体结构和控制器的优化进行电机振动控制,是目前电机控制领域普遍采用的方式。而从电机、车轮和车身这一机电耦合系统出发,以提高轮毂驱动电动汽车各工况下的综合性能为目标,研究新型悬架的车身姿态控制,抑制电机不平衡径向力,修正气隙偏心,在保证车身平稳的同时实现轮胎的良好接地性,提高轮毂驱动电动汽车的平顺性和操纵稳定性,是开关磁阻轮毂电机振动控制的发展趋势。
猜你喜欢
农业装备与车辆工程(2022年2期)2022-10-30
汽车实用技术(2022年5期)2022-04-02
航空发动机(2021年1期)2021-05-22
科学与财富(2021年34期)2021-05-10
汽车实用技术(2021年3期)2021-02-24
振动工程学报(2019年2期)2019-05-13
科技视界(2018年12期)2018-07-28
科技与创新(2015年18期)2015-09-11
哈尔滨理工大学学报(2014年3期)2015-01-04
哈尔滨理工大学学报(2014年4期)2015-01-04
