
基于PSD光杠杆自平衡精密电磁天平的研究*
2019-06-05 09:37张会玲鲍丙豪邓晓蓉
传感技术学报 2019年5期
张会玲,鲍丙豪,吴 迪,邓晓蓉
(江苏大学机械工程学院,江苏 镇江 212013)
电磁天平是一种集传感器技术、电磁学、模拟与数字电子技术、智能信息处理、材料、结构力学、精密机械与制造等多学科的高性能的精密计量仪器,也是广泛应用于国防、医药、质量控制、实验室等领域中的质量计量的标准器具[1-4]。
电磁天平的核心部件是电磁力传感器,包括横梁组件,位移传感器,磁力结构,其位移传感器是对横梁组件所产生的位移进行检测,它的精度对电磁天平的精度起到决定性作用,并要求具有结构简单、稳定性好、抗干扰能力强等特点[1-5]。目前国内大多数厂家选用硅光电池位移传感器作为位置检测传感器,硅光电池位移传感器是利用光栏把横梁位置偏移转换成光斑的位移,再把光斑位移投射到光电池的感光面上,由于硅电池输出的电压与其感光面积的变化成正比,因此可实现位置偏移的检测[2-5]。同时仍存在结构复杂,易受环境光、振动等干扰,可靠性低,尤其是长时间称量稳定性差等问题。
因此本文在现有的电磁天平基础上,提出并设计了由PSD、光杠杆与横梁组件构成的微位移传感器来检测电磁力传感器中横梁组件的位移,并与电磁力传感器组成闭环系统,使原有的位移量进一步放大,并能提高检测精度,优化了电磁天平的整体性能,并通过实验进行验证。
1 电磁天平的工作原理
电磁天平一般由电磁力传感器与信号处理系统构成的闭环系统,单片机构成的显示系统组成,其中信号处理系统包括光电转换电路,PID和驱动电路,单片机构成的显示系统包括低通滤波电路,数模转换电路,微处理器系统等,结构如图1所示。质量为m的被称物使电磁力传感器中的横梁发生位移,该位移量由硅光电池构成的位移传感器进行检测,硅光电池输出的电压信号经PID调节与驱动电路,变成与被称物的质量m成正比的电流I并流经电磁力传感器中的线圈,载流线圈在永磁铁的磁场作用下,将产生向下的安培力F,使电磁力传感器的横梁向下移动,直到横梁回到初始位置。此时,安培力F的力矩与被称物的重力G的力矩相等,使电磁力传感器中的横梁组件处于平衡状态[5-10]。
线圈中的安培力F可表示为:
F=B⊥IL=BILcosα0
(1)
式中:B为永磁体气隙中的磁感应强度;L为载流线圈的导线总长度;α0为横梁组件与水平面形成的夹角。
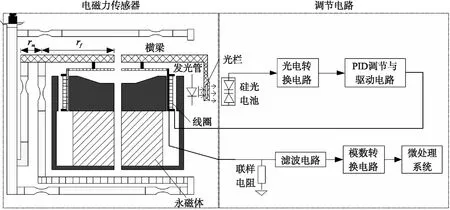
图1 采用硅光电池作为位移传感器的电磁秤的工作原理图
电磁天平空载时,由横梁两端力矩平衡时可得:
BI0Lrfcosα0+mcg(rccosα0+rhsinα0)=mpgrmcosα0
(2)
式中:I0为空载时线圈的电流;rf为线圈所产生的安培力的力臂;mc为包括线圈的横梁组件的质量;rc为包括线圈的横梁组件质心至支点的水平距离;rh为包括线圈的横梁组件质心至支点的垂直距离;rm为物盘到支点的距离;mp为载物盘的质量。
当被称物的质量为m时,由横梁两端力矩平衡时可得:
BILrfcosα0+mcg(rccosα0+rhsinα0)=
mgrmcosα0+mpgrmcosα0
(3)
式中:I为加载重物后线圈的电流。
由式(2)和式(3)可知,电磁天平在空载时系统保持平衡,当质量为m的被称物放到载物盘后,被称物重力产生的力矩与安培力产生的力矩增量相等,因此线圈中的电流可以表征被称物的质量。
可得线圈中的电流I可表达为:
(4)
为保证电磁天平空载时可正常工作,式(4)的等效质量值m0必须满足条件:m0>0,以使空载(m=0)下仍能为系统提供一个初始电流I0=m0grm/(BLrf),使得电磁力传感器满足力矩平衡。
式(4)为电磁天平质量计量的数学模型[9-10]。线圈中电流的大小可通过检测取样电阻上的电压来表示,该电压信号经过滤波电路、数模转换电路,单片机系统处理后在LCD中显示质量值
2 位移检测机构
横梁偏转过程中所产生的位移需要用位移传感器进行检测,传统的检测方式为差动式硅光电池来进行检测,但存在结构复杂,易受环境光、振动等干扰,可靠性低,尤其是长时间称量稳定性差的问题。我们提出采用PSD光杠杆法来测量横梁加载后所产生的位移,具有可以将位移量进一步放大和提高测量精度的优点。
2.1 PSD的输出特性及调理电路
图2为PSD的结构示意图,PSD光敏面有两个电极1和2,当有入射光照射时,其两个电极输出的电流分别为I1和I2。M为PSD光敏面中心点到电极间的距离,x为入射光点到光敏面中心点的距离。根据PSD的工作原理可得,当光强不变时,电极输出电流与入射光点到光敏面中心点的距离x呈线性关系[11-13],则:
(5)
由式(5)可确定光斑能量中心相对于器件中心位置x,它只与I1、I2电流的差值及和值之间的比值有关,与入射光能的大小无关。并根据上式可设计其位置转换电路,原理图如图3所示,是由加法电路、减法电路、除法电路组成[12-14]。
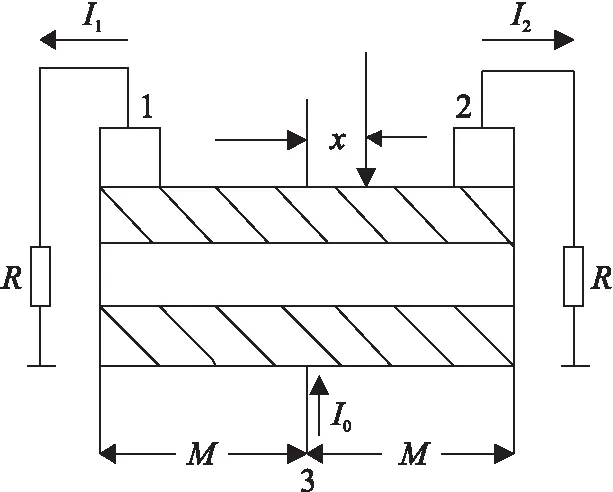
图2 PSD的结构示意图
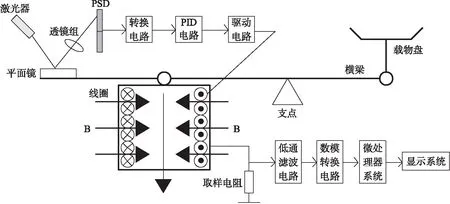
图4 PSD光杠杆与横梁组件构成微位移传感器
由图3可知,转换电路简单稳定,由于PSD只与光的能量重心有关,且光敏面无死区,可连续测量光斑位置,分辨率高等特点[15-16],所以将PSD组成的微位移传感器应用到电磁天平系统中,可以提高其检测的分辨率,优化系统的整体性能。
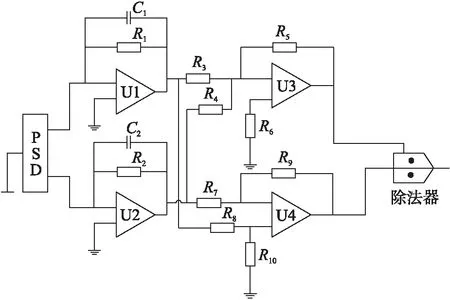
图3 PSD传感器的转换电路图
2.2 PSD光杠杆法组成的微位移传感器
本文采用PSD光杠杆与横梁组件构成微位移传感器,直接检测横梁的位移量。如图3所示,将平面镜安装在横梁上,调整激光器与PSD的位置,使之在系统平衡时,激光器发射的光经平面镜反射到PSD的光敏面上。当被称物放在物盘上时,由于重力作用,横梁发生偏转,平面镜随之发生倾斜,引起反射光发生偏转,使投射到PSD的光敏面上的光点位置发生变化,从而引起PSD输出变化,将此信号经过信号变换、PID调节与驱动电路后,通入线圈,并在线圈中产生反向安培力,以使得横梁回到初始位置,实现系统的再次平衡。将线圈中的电流通入取样电阻中,然后对取样电阻的电压值进行滤波,再经A/D转换送入到微处理系统,经处理后在显示屏上显示其被称物的质量数值。
如图4所示,可以对PSD的位置进行调整,来实现对位移进一步放大。本文采用PSD光杠杆法测量横梁的位移量,具有可将位移量进一步放大的优点,同时PSD的测量精度高,可以提高系统的测量精度,因此进一步优化了系统的整体性能。
3 实验结果
在室温条件下,对样机进行试验,实验内容主要包括:①在加载过程中,对位移传感器的输出波形进行采集;②对样机进行全量程测试检验,并给出样机的验证结果。
3.1 位移传感器的输出
利用示波器对样机中位移传感器的输出电压进行波形采集,从空载到加载标准200 g砝码再到空载的过程中,传感器的输出波形如图5所示。
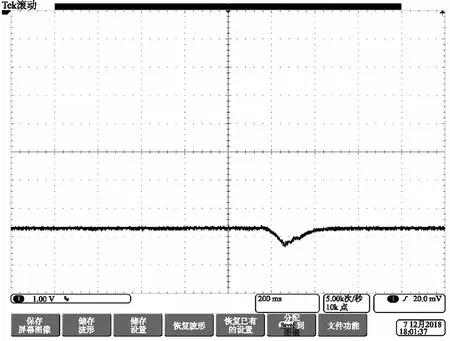
图5 位移传感器输出波形
如图5所示,当空载情况下,横梁处于平衡状态,传感器输出稳定电压,当将200 g砝码放在载物盘后,横梁发生偏转,引起位移传感器输出发生变化,经调节后,横梁再次达到平衡,输出值再次稳定,符合电磁天平的数学模型。
3.2 电磁天平的实验
对样机进行全量程测试检验,试验砝码为F1等级的标准砝码,实验数据如表1所示。由实验数据,利用最小二乘原理得到如图6所示的拟合直线,其拟合方程为:
y=1.000 002x-0.000 728
(6)
式中:因变量y为样机的实际显示输出值(g),自变量x为标准砝码值(g)。
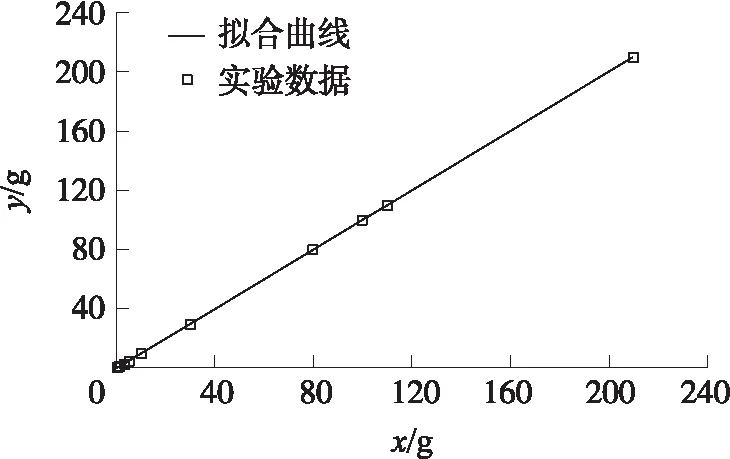
图6 最小二乘拟合直线
由此可得样机的静态特性指标为:
①线性度:
(7)
②滞后:
(8)
③重复性:
根据贝塞尔公式:
(9)
算得σmax=0.002 4。
(10)
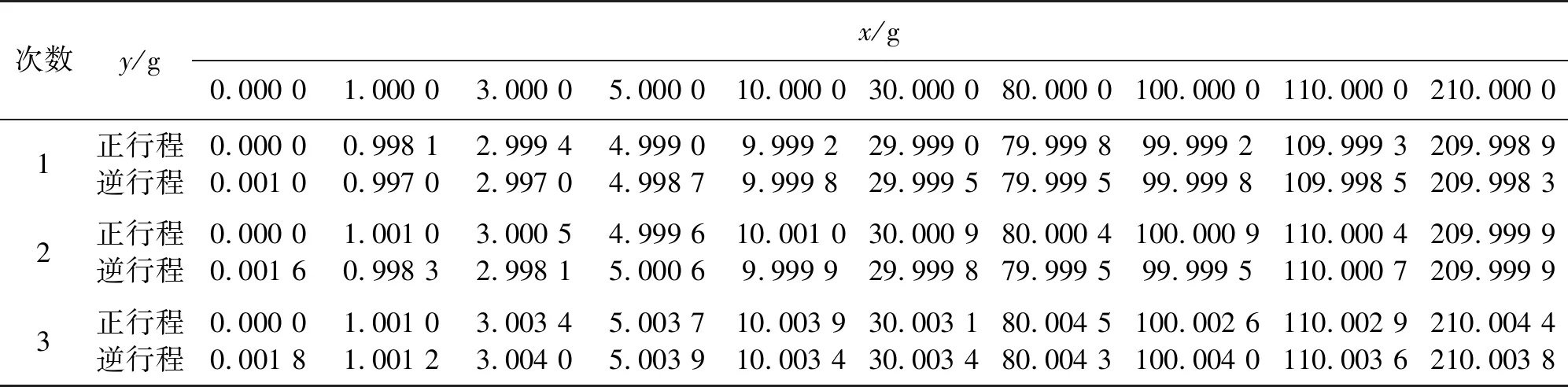
表1 样机检测结果
4 结论
本文通过对电磁天平结构和原理的分析与研究,设计了一种基于PSD光杠杆自平衡精密电磁天平,即采用PSD光杠杆组成的微位移传感器来替代原有的光电元件,可实现对位移量的进一步放大并能提高测量精度,使电磁天平的整体性能得到优化,通过对样机进行多次试验,测得样机系统总精度为0.003 2%,具有一定的推广意义。
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
中学生数理化·八年级物理人教版(2021年12期)2021-12-31
减速顶与调速技术(2020年3期)2021-01-18
中学生数理化·八年级物理人教版(2020年12期)2021-01-18
装备制造技术(2020年4期)2020-12-25
房地产导刊(2020年6期)2020-07-25
制造技术与机床(2018年9期)2018-09-19
少年漫画(艺术创想)(2018年2期)2018-09-11
新商务周刊(2017年16期)2017-12-08
中国棉花(2017年10期)2017-11-04
