
基于双向DCDC电路有源二次滤波研究
2019-06-01 06:23沈来来刘国东邱瑞昌刘志刚
北京交通大学学报 2019年2期
沈来来,陈 杰,刘国东,邱瑞昌,张 钢,刘志刚
(北京交通大学 a.电气工程学院,b.北京市轨道交通电气工程技术研究中心,北京 100044)
单相四象限变流器实现了电网侧电压电流同频同相,但不可避免地会产生与直流侧负载同等量级的二次脉动功率.传统方法是在直流侧并联LC二次谐振电路,该电路体积、重量比较大,不符合现代电力机车轻量化的发展趋势.因此,通过额外辅助电路对二次脉动进行有源滤波具有重要意义.
通过额外辅助电路对二次脉动进行有源滤波的基本思路是通过控制开关管进而控制储能元件中的能量,使得储能元件中流动的功率与四象限变流器输出的二次脉动功率相等,即对该功率进行了补偿,使其不会对直流母线电压产生影响.常用的储能元件为电感和电容,其中电感能量密度小,且存在磁饱和以及损耗的问题,因此在大多数场合都采用电容进行储能.
基于电容储能进行二次滤波的拓扑可以分为开关复用型和独立控制型两大类.开关复用型是改变四象限变流器的拓扑,在其中的桥臂上加入相应的辅助电路[1],通过复用四象限桥臂开关管对其进行控制为二次脉动功率提供回路.这类拓扑需要改变既有四象限变流器的控制策略和拓扑结构,且每个开关桥臂的导通时间不一致,散热不易设计.独立控制型电路是在直流母线上并联相应的开关管辅助电路,该类拓扑可实现对滤波电路开关管的独立控制,不会对四象限变流器的控制产生影响,因此该类拓扑具有更高的应用价值.
因为二次脉动功率是双向的,因此独立型电路基本采用双向DCDC电路.文献[2]采用的是双向boost型电路,虽然该电路能直接控制该电路的滤波电感Lf上的电流与四象限变流器输入至直流侧的二次电流相等以达到滤波的目标,但是要求储能电容上的电压大于直流母线电压,电压应力大,不适用于大功率系统.文献[3]采用的是双向buck-boost型电路,该电路对储能电容既能实现升压也能实现降压,但是该电路的功率开关管不是桥臂式结构,不利于系统模块化.因此本文采用双向buck型电路,该电路的开关器件为桥臂式结构,直接与直流侧并联,利于变流器系统集成[4].文献[5-8]均以此电路为基础展开了研究.其中,文献[5]通过将直流电压指令与实际检测得到的直流电压作差进行闭环控制.在直流电压比指令值高时,控制DCDC桥臂的上管开通,DCDC电路运行在buck模式,将直流侧多出的能量转移至电容,以降低电压;在直流电压比指令值低时,控制DCDC桥臂的下管开通,DCDC电路运行在boost模式,将电容上的能量释放至直流侧,以抬升电压.该控制方式过于简单,稳态误差大,不能很好地消除直流侧的二次脉动.文献[6]中的DCDC电路工作在断续模式,通过检测直流母线电压与DCDC模块的电容电压,计算流经电感上的电流峰值和开关管在每个开关周期内的开通时间,使得从直流侧流入至DCDC模块的电流积分值与从四象限变流器流入至直流侧电流中的二次谐波部分的积分值相同,即能将二次脉动完全消除.在该方法中,DCDC电路始终工作在断续模式,因此其消除的二次功率十分有限,不适用于大功率系统.文献[7]忽略电感上的功率脉动,将电容作为唯一储能元件,以消除二次脉动功率为目标,求解电容电压的微分解,将该微分解作为指令对电容电压就行控制,使得DCDC电路能够运行在连续模式.但是大功率系统中,二次脉动功率很大,需要很大的电感对电流进行滤波,因此忽略电感上的功率脉动,将会带来很大的误差.文献[8]通过控制电感电流从而控制DCDC模块中流动的二次功率与四象限变流器输入至直流侧的二次脉动功率实时相等,即二次脉动功率完全由DCDC模块吸收,对直流侧电压和负载不产生影响.其对电感电流采用的是比例控制,稳态误差大;对电容的直流电压偏置采用开环控制,不能保证控制精度.
本文作者针对文献[8]的不足,提出了一种新的检测和控制方法.首先分析了四象限二次脉动功率的来源,再利用该DCDC电路对二次脉动功率进行消除的方法进行了理论推导.对电感电流的控制采用比例谐振以消除其稳态误差,对电容直流电压采用PI控制以保证电容电压的稳定.同时,本文基于电感电流在额定功率下能跟踪指令电流和储能电容最大电压限制,给出了储能电容及其偏置电压之间的约束条件,以此进行了参数设计.最后给出了仿真和实验结果,证明了理论的可行性,滤波效果显著.
1 二次功率脉动分析
图1为电力机车单相四象限整流系统,其中电网侧交流输入电压vs,输入电流is均为正弦变化,形式如下
(1)
式中:Vs、Is分别为电压电流幅值;ω为基波角频率;ψ为功率因数角,若四象限变流器能够实现交流侧电压电流同相位,则ψ=0,由此可得交流侧输入功率为
ps=vsis=Vssin(ωt)Issin(ωt)=
(2)
交流侧电感上的功率为
(3)
变流器输入至直流侧功率为
(4)
定义
(5)
式中:po为变流器输入的直流功率,提供给负载;p2-ripple为输入的脉动功率,其中:
(6)
由式(5)可知,为实现电网侧功率因数为1,四象限变流器的输出不仅有提供给负载的直流功率,还有同等量级的二次脉动功率,其反映在直流侧就会产生幅值很大的二次电压脉动,不仅会缩短开关器件以及电容的寿命,还会影响后级逆变器以及四象限变流器的控制[9-10].在一般的应用中,该二次脉动的功率通常由LC二次谐振电路进行滤除;或使用较大的直流侧支撑电容,使得纹波变小[11].其中LC谐振电路在使用过程中,参数会发生变化,引起谐振点偏移,另外,这两种无源滤波方式都存在器件体积重量大,功率密度低等问题.因此,本文基于双向buck型电路对二次脉动功率进行有源滤波.
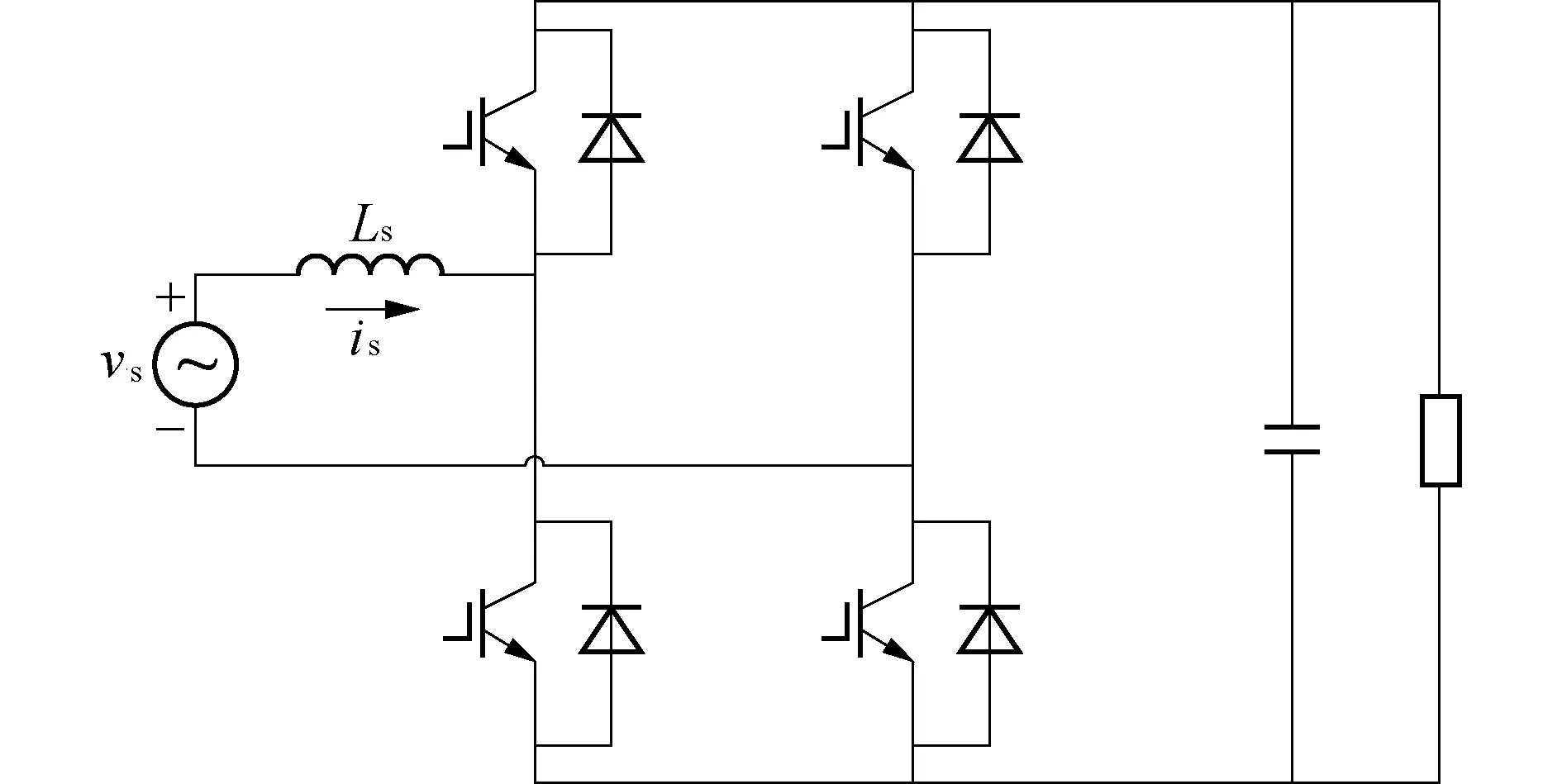
图1 单相四象限整流系统Fig.1 Single-phase four-quadrant rectifier system
2 双向DCDC电路滤波方法
2.1 基本原理
图2为本文采用的主电路拓扑,该拓扑前端两个桥臂为单相四象限变流器桥臂,用来将交流电能变换为直流电.第三个桥臂为双向DCDC模块桥臂,通过控制该桥臂的开通和关断,使得二次脉动功率完全流经该桥臂的LC支路,因此不会在直流侧产生二次脉动电压.
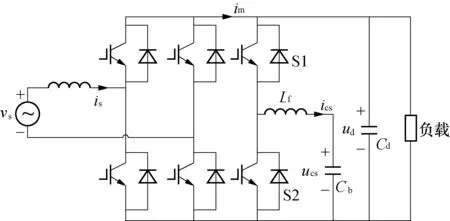
图2 主电路拓扑Fig.2 Main circuit topology
假设Lf上的电流形式如下
ics=Icssin(2ωt+θ)
(7)
式中:θ表示电流ics初始相位角.
在初始阶段,给定电容Cb一个直流电压偏置Ucs,则
(8)
则流过LC支路的功率可以表示为
Pcs=ics(uLf+ucs)=
IcsUcssin(2ωt+θ)+
(9)
令Pcs中的二次功率与四象限输入至直流侧的二次脉动功率相等,即
IcsUcssin(2ωt+θ)=P2-peaksin(2ωt+α)
(10)
式(10)表明DCDC模块对二次脉动功率为零阻抗,使得二次脉动功率不会影响后级负载.虽然该方法引入了四次功率,但是该四次功率的大小已经远小于二次功率,且因为频率加倍,其在直流母线上引起的电压脉动将会更小,对负载及整个系统的控制性能的影响可以忽略不计.
由四象限变流器工作原理可知,四象限变流器流至直流侧的电流im的主要分量为提供给负载的直流分量Id、二次谐波分量i2及开关次谐波分量ik.假设直流侧电压为Ud,则式(5)可改写为
po=IdUd,p2-ripple=i2Ud
(11)
根据式(7)、式(9)、式(11),即可得指令值为
(12)
2.2 控制策略
图3为本文采取的控制策略框图.四象限变流器的输出电流与直流母线的电压相乘得到总的输出功率.再将该功率进行滤波得到p2-ripple,即为应该通过DCDC进行滤除的目标二次功率,由式(12),得到Lf的电流目标值.由前面的推导可知,该目标值为一频率为100 Hz的正弦量,为实现对该目标值的无静差跟踪,选择控制器G1为比例谐振控制器[12-14],形式如下
(13)
式中:Kp为比例控制系数;Kr为谐振控制系数.
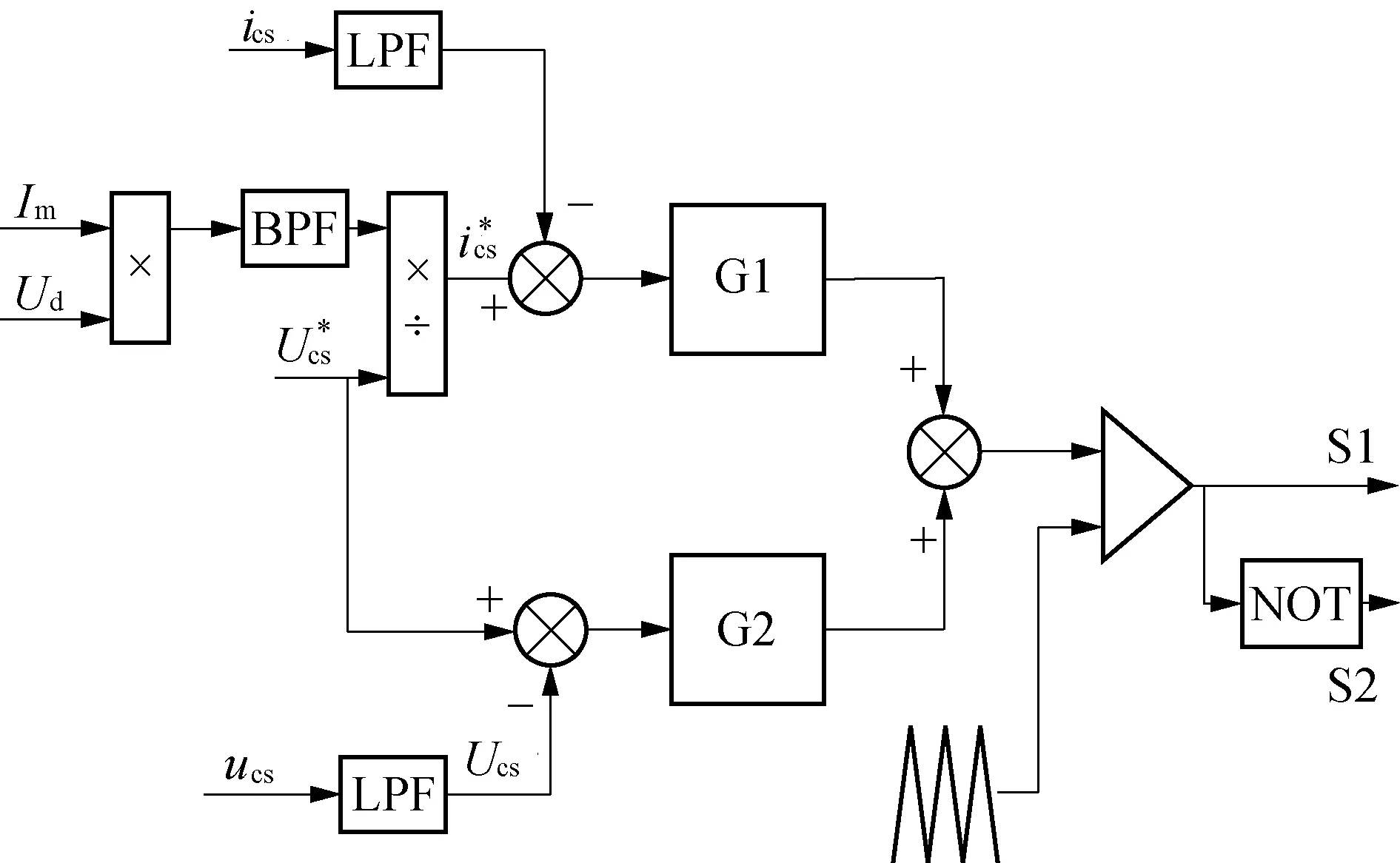
图3 DCDC控制框图Fig.3 Control block diagram of DCDC
文献[8]对于电容Cb上的直流电压进行了开环控制,开环控制不能保证电容上的实际直流电压偏置与目标值一致,从而不能保证将二次目标功率完全消除.本文对电容Cb上的直流电压采取闭环控制,如图3所示.控制系统将检测到的ucs进行低通滤波,以消除其中的二次分量及高频分量.因为该变量为一直流量,故选择控制器G2为PI控制器以实现无静差跟踪.将控制器G1和G2的输出相加,从而得到控制占空比.
2.3 比例谐振控制数字化实现
目前常见的离散方法分为5类:
1)差分变换法.前向欧拉变换(FWE),函数为
s=(z-1)/Ts
(14)
2)保持变换法.零阶保持变换(ZOH)和一阶保持变换(FOH),函数为
(15)
(16)
3)双线性变换法(图斯汀双线性变换(TUS)和频率预畸变的双线性变换(PRE)),函数分别为
(17)
(18)
4)响应不变法.脉冲响应不变法(IMP),函数为
X(z)=Z[L-1(X(s))]
(19)
5)零极点匹配法(ZPM).
z=esTs
(20)
ZOH、FOH、PRE、ZPM和IPM方法均引入了非线性因素,使得数字实现变得复杂,而FEW和TUS则无非线性因素引入,数字实现较为简单.
利用Matlab将式(13)的连续函数根据以上变换分别进行离散函数实现,取Ts=0.000 5 s,为系统控制周期,将各离散方法离散后的传递函数和连续域下的传递函数的幅频特性曲线对比,见图4 .

图4 各离散函数与连续函数的幅频特性对比Fig.4 Comparison of amplitude-frequency characteristics between discrete functions and continuous functions
从图4可以看出,以上离散算法在100 Hz处均有较好的幅频特性.观察100 Hz频率点附近的放大图进一步发现,TUS和PRE这两种离散算法的幅频特性偏移,而ZOH、FOH、FWE、ZPM和IMP算法的幅频特性较为一致,且与连续函数的幅频特性相差不大.结合以上分析,本文采用FWE对式(13)进行离散化,离散化后z域公式为
G1=Kp+2KrωcTs×
(21)
3 基于混合动力动车组的参数设计
3.1 设计原理
文献[6]分析了在给定储能电容Cb不同直流电压偏置Ucs下电容电压及电流的变化波形,并提出如果在一个功率周期内,储能电容Cb能够完全的进行充放电,即电容Cb电压最小值为0,最大值为直流母线电压,此时电容能够比传统LC二次谐振滤波减小12.5倍.但是实际上,当直流电压偏置Ucs过大或过小时,在利用开关器件进行控制下,受限于电感器件的电压电流微分关系,电感上的电流将无法跟踪指令值.因此,本文以能够实现电感电流跟踪指令值为目标对参数进行相关设计.
当选定了电容Cb上的直流电压偏置Ucs后,可以假设该偏置为一直流电压源,因此DCDC模块的拓扑可以看作如图5的形式.
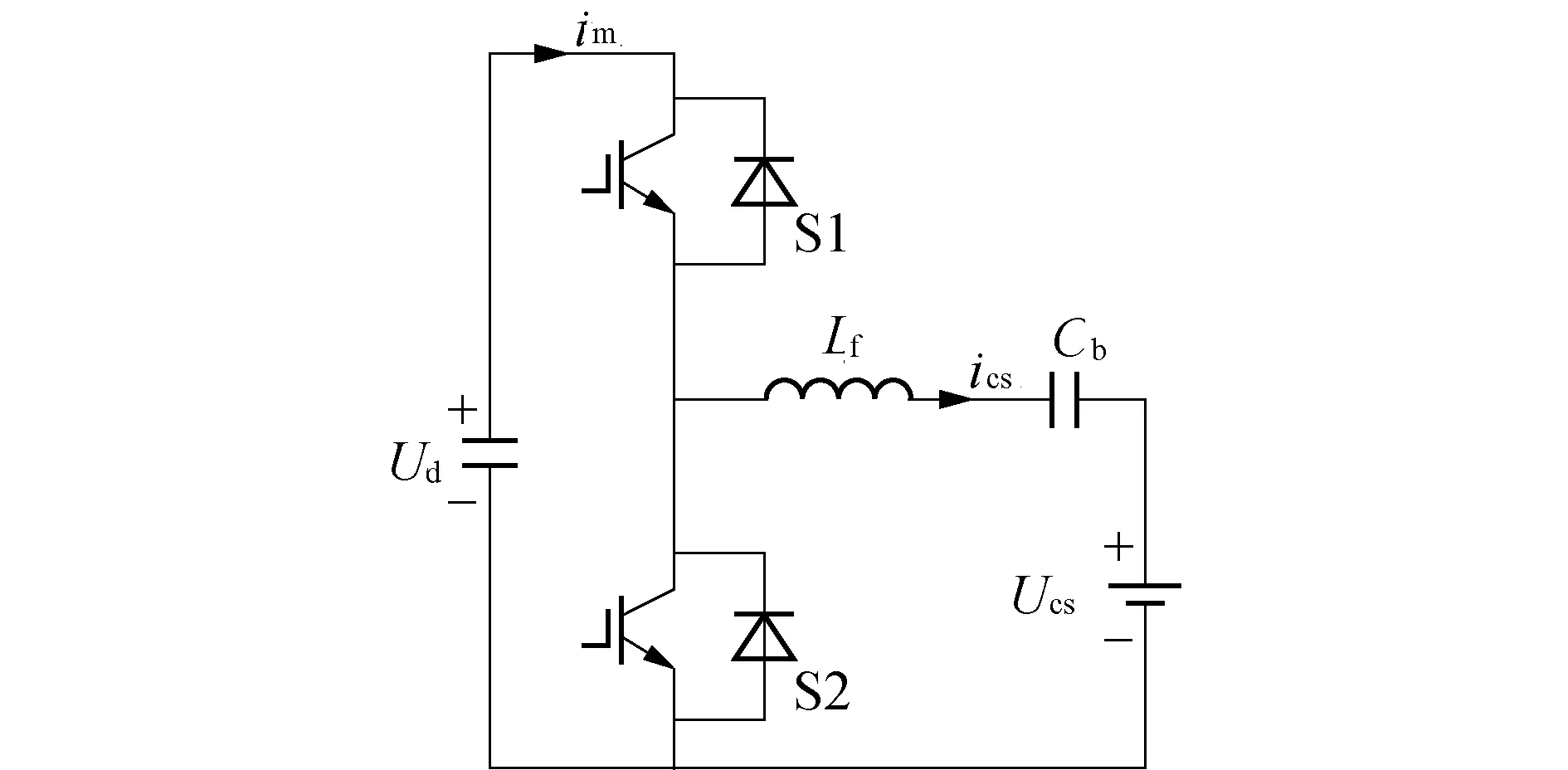
图5 DCDC模块拓扑形式变换Fig.5 Transformation of DCDC module topological form
由2.2节可知,Lf的电流目标值为100 Hz的正弦量,因此,根据图5可知,需要在Cb和Lf串联电路上经脉宽调制出基波与电流同频率的脉冲电压.串联阻抗大小为j(2ωLf-1/(2ωCb)),记为jX.为满足电流的跟踪,结合式(12),则有如下约束条件
(22)
当电流在零点附近变化时,加载在串联阻抗上的电压在一个开关周期内积分为最大,因此,考虑最严峻的情况,式(22)可改写为
(23)
为保证系统安全性和耐压要求,储能电容Cb上的电压不应远高于直流母线电压,根据传统LC二次谐振中的滤波电容电压不超过1.1倍的直流母线电压的设计原则,则有如下约束条件:
(24)
3.2 参数实例分析
混合动力动车组的牵引变流系统主拓扑中DCDC模块的电感与动力锂电池串联,对其进行充放电,以保证动车组在非电气化铁路段及过分相段正常运行及实现动车组电制动过程中能量的回收[4].在接触网运行工况下,通过开关将DCDC模块的电感接入储能电容,以补偿二次脉动功率,从而取代传统LC滤波谐振电路.
混合动力动车组牵引变流器系统参数设置如下:整流器额定功率为2×400 kW;IGBT开关频率为1 kHz;交流额定输入电压有效值为900 V;Lf=4mH;Cd=8 mF; 直流额定电压为1 700 V.其具有两个四象限整流器及两个DCDC桥臂,每个四象限变流器产生的二次脉动功率幅值大小基本与其额定功率相等,因此,每个DCDC桥臂需要处理的二次脉动功率为400 kVA.将相关参数代入不等式(22)、式(23),通过作图可知串联阻抗X及直流偏置电压的取值范围如图6阴影部分所示.
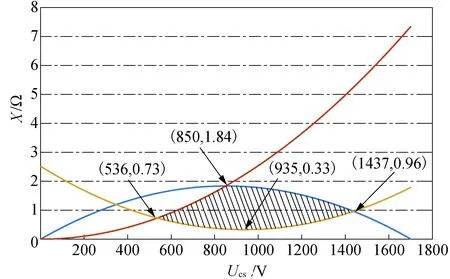
图6 X与Ucs的约束条件Fig.6 Constraints of X and Ucs
由图6可知,在额定功率下,X的取值范围为0.33~1.84 Ω,反推可知Cb的取值范围为0.73~2.37 mF.该混合动力动车组原来的二次谐振滤波电感电容分别为0.359 mH和7 mF.当采用本文提出的有源滤波方案,在取代了二次谐振滤波电感电容的基础上,仅需增加两个远小于7 mF的储能电容,这样不仅提高了整车的功率密度,而且避免了无源滤波参数变化导致谐振点偏移的问题,保证列车长期运行滤波功能的稳定性.
4 仿真和实验结果分析
4.1 仿真分析
本文根据混合动力动车组的实际参数,利用Simulink搭建了仿真模型,通过S-Function构建出一个包括中断、AD采样、控制算法和脉冲发生等环节的虚拟DSP.根据以上参数设计,选取储能电容Cb为2 mF,Ucs为900 V,仿真波形如图7所示.直流侧电压FFT分析见图8.
由图7可知,在DCDC模块未投入之前,直流电压存在明显的二次脉动;DCDC模块投入之后,直流电压脉动幅值明显降低,脉动峰峰值由原来的119.8 V下降为30.5 V,主要谐波分量为四次谐波和开关次谐波.经FFT分析可知,二次脉动由53.78 V下降为2.59 V,四次脉动由原来的3.91 V上升为10.94 V,对直流电压的影响不大,直流电压THD由原来的3.17%下降为0.74%,滤波效果明显.由图7(d)可知,在负载突变的情况下,DCDC滤波模块能实现对指令电流的快速跟踪,动态响应速度快.
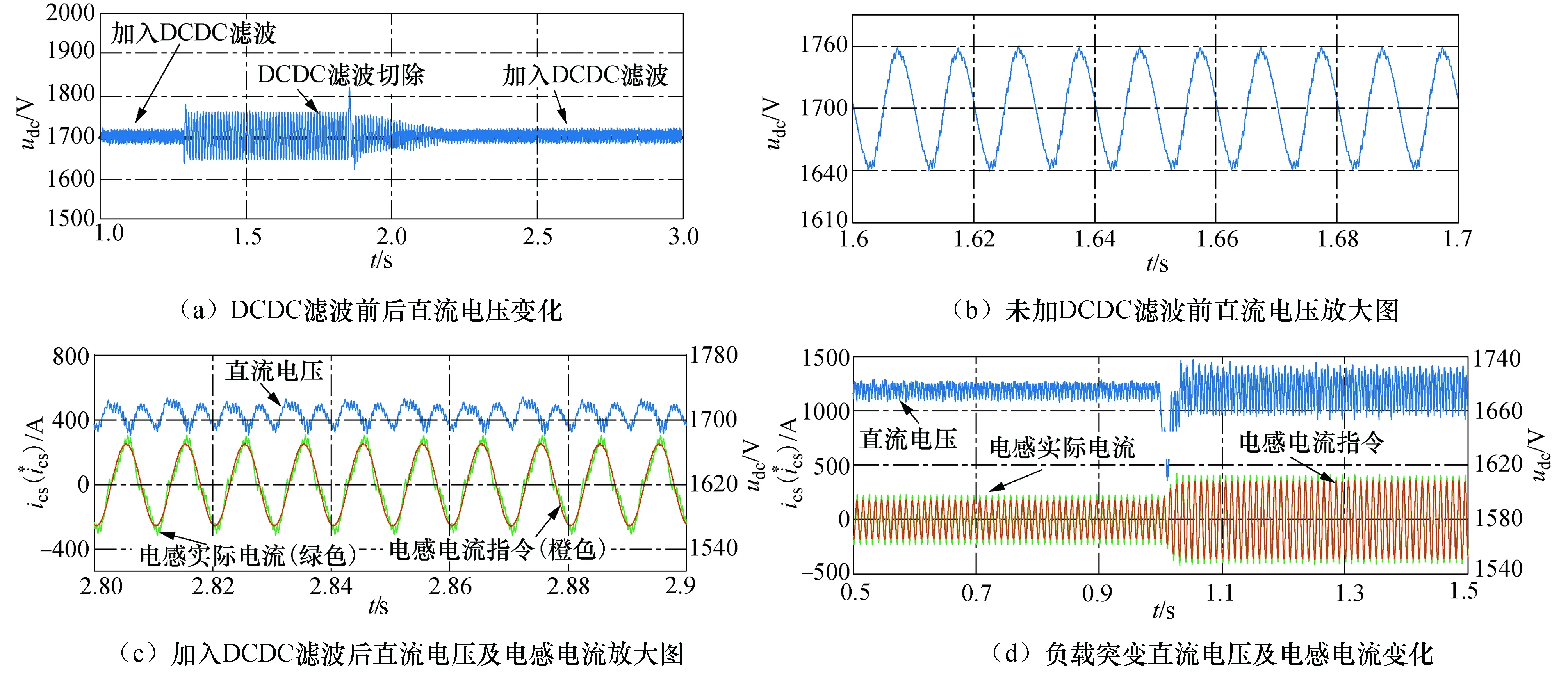
图7 仿真波形Fig.7 Waveforms of simulation
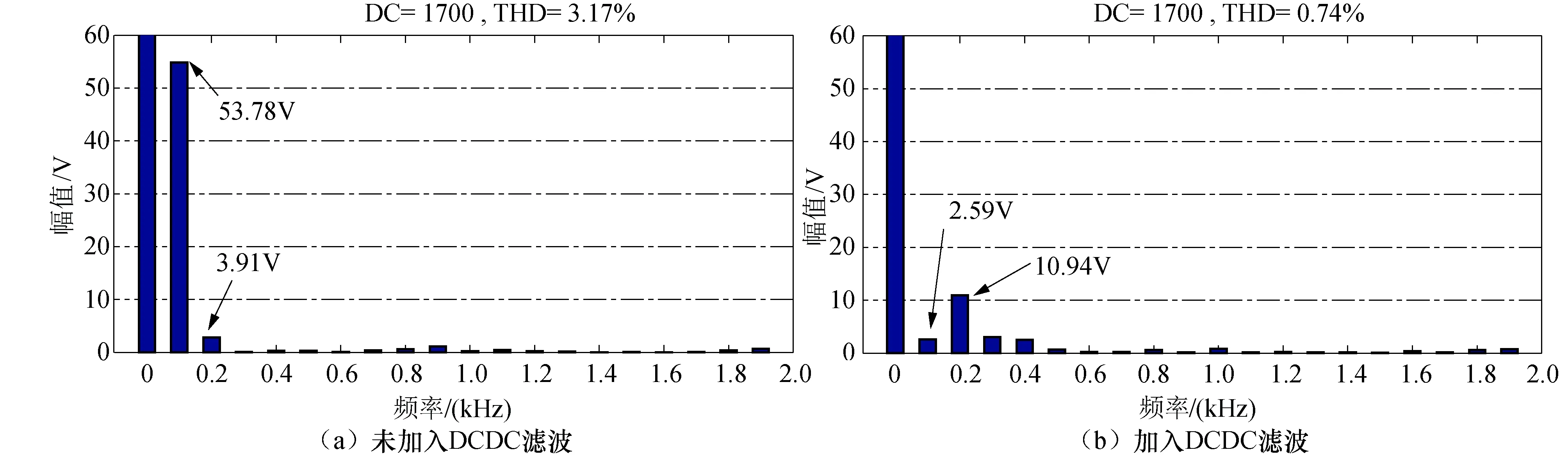
图8 直流侧电压FFT分析Fig.8 FFT analysis of DC voltage
4.2 实验验证
基于以上分析,本文在混合动力动车组牵引变流器地面实验平台并进行了中压实验,其中vs有效值为380 V,Ud为600 V,Ucs为400 V,负载功率为15 kW,实验波形如图9所示.
由图9可知,实验波形与仿真波形基本一致,二次脉动基本消除,直流电压的脉动值由14.3 V下降为4.5 V,电压脉动明显减小,滤波后的主要脉动分量为4倍频.
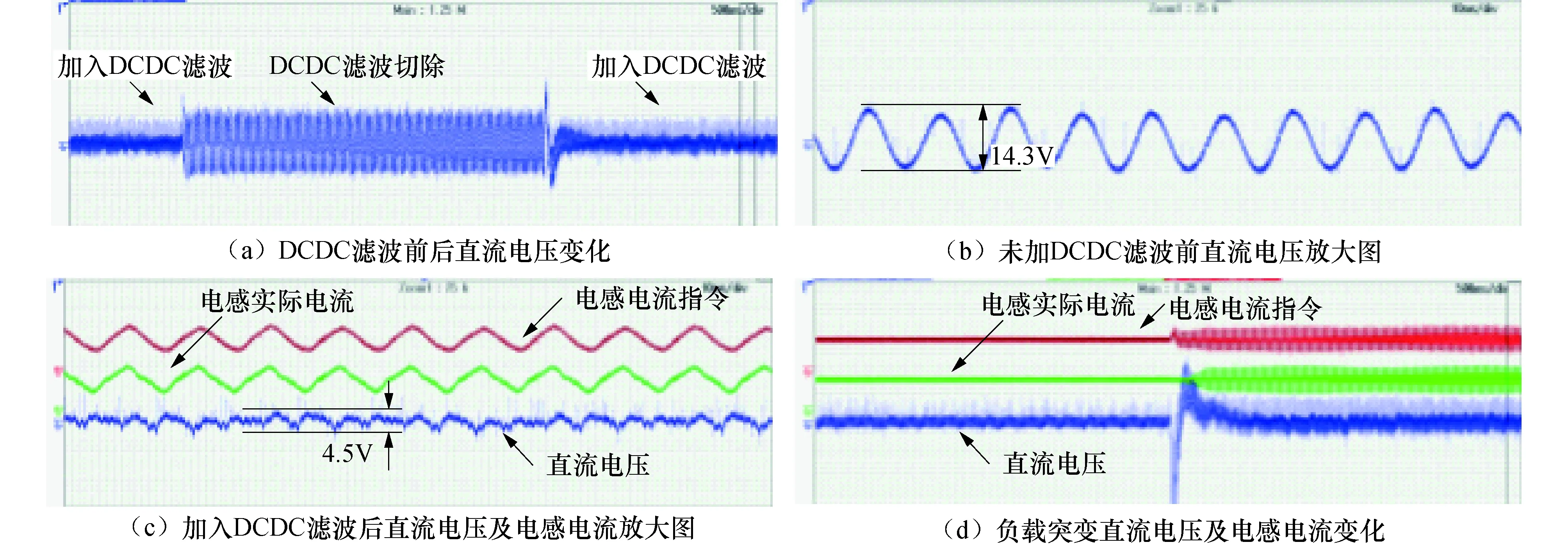
图9 实验波形Fig.9 Waveforms of experiment
5 结论
1)研究了一种采用双向DCDC电路对机车直流母线二次脉动进行滤波的方法,代替传统二次谐振环节,提高了系统的功率密度.该双向DCDC电路滤波方法通过比例谐振闭环控制实现了对目标正弦电流的无静差跟踪,PI闭环控制保证了储能电容直流偏置电压的稳定.
2)给出了储能电容及其偏置电压之间的约束条件并进行了参数设计.仿真和实验验证了该方法的可行性,滤波效果明显,实际实验中直流电压脉动值由滤波前的14.3 V下降为4.5 V,二次脉动基本消除.虽然引入了四次脉动功率,但是该分量对直流电压的影响不大,滤波后的直流电压上下波动很小,基本不影响直流侧负载的性能.
猜你喜欢
都市快轨交通(2022年2期)2022-06-28
热力发电(2022年4期)2022-04-30
中学生数理化·高一版(2022年3期)2022-04-05
新传奇(2020年48期)2020-12-28
初中生学习指导·提升版(2020年10期)2020-09-10
软件(2020年3期)2020-04-20
科学导报·科学工程与电力(2019年5期)2019-10-20
阅读(低年级)(2018年5期)2018-05-14
山东工业技术(2018年2期)2018-03-20
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
