
基于时间参数的CTCS-1级 RDC设置方式的研究
2019-06-01 06:22刘中田邹少文
北京交通大学学报 2019年2期
刘中田,徐 越,邹少文
(1.北京交通大学 电子信息工程学院,北京 100044; 2.中铁二院工程集团有限责任公司,成都610031)
2015年中国铁路总公司提出的新一代CTCS-1级列控系统,旨在将既有线车载列控数据下放到地面,由地面区域列控数据中心(RDC)统一管理,RDC以GSM GPRS方式向CTCS-1级车载设备发送行车数据,实现临时限速的即时更新,减少司机对列控数据的操作,提高既有线列控设备安全性、可靠性与自动化水平.CTCS-1级列控系统区域列控数据中心规定一个RDC应具备8个联锁车站的管辖能力[1].但既有线站场情况复杂,存在一站多场、多站密集分布的情况,实际设置RDC时并不能仅考虑一个RDC管辖8个车站的技术要求,还需要考虑相邻RDC边界车站区间长度满足控车权移交时列车走行距离.选择RDC管辖边界车站时要比较RDC切换边界点与前方车站的距离.RDC切换时车地通信中断过程列车走行距离,只有前者大于后者时,才能保证列车进站前完成RDC切换任务,列车与接收RDC建立通信会晤并获取进站行车数据.
列控系统地面设备设置方式的研究主要集中在CTCS-3级无线闭塞中心RBC布置方案和容量计算两个方面.文献[2-3]通过对单个RBC控车容量的研究,提出RBC数量计算原则和方法.文献[4-5]通过对RBC容量参数、控制对象、控制范围与处理时间的分析提出了不同情况下RBC的布置原则与公式.上述文献均针对CTCS-3级高速铁路的无线闭塞中心的设置,但较少有对CTCS-1级区域列控数据中心设置的研究.
目前单电台列车移交时车地通信中断时间在CTCS-1级列控系统总体技术方案还没有具体数据[6].列车移交时RDC与车载设备之间进行复杂的信息交互,基于传统需求规范的建模方式难以保证模型与系统需求规范的一致性.本文作者利用形式化方法——时间有色Petri网(Timed Colored Petri Nets,TCPN)对RDC切换过程建模仿真,在验证模型正确性的基础上,利用CPN-Tools仿真列车移交过程,确定单电台列车移交过程车地通信中断的时间范围,并确定RDC切换过程列车走行距离,将模型运行获得的时间参数转化为RDC设定管辖范围所需的距离数据,在此作为RDC确定管辖边界站的重要依据.
1 CTCS-1级区域列控数据中心
新一代CTCS-1级列控系统,适用于200 km/h及以下新建及改造线路,其地面设有区域列控数据中心RDC,RDC以无线通信方式将线路数据、进路与临时限速等信息传输至列控车载设备,能够有效解决CTCS-0级列控系统线路数据更换与临时限速下达时存在的安全风险[8].CTCS-1级列控系统由地面子系统、车载子系统与车地无线通信子系统三部分组成,其系统结构如图1所示.
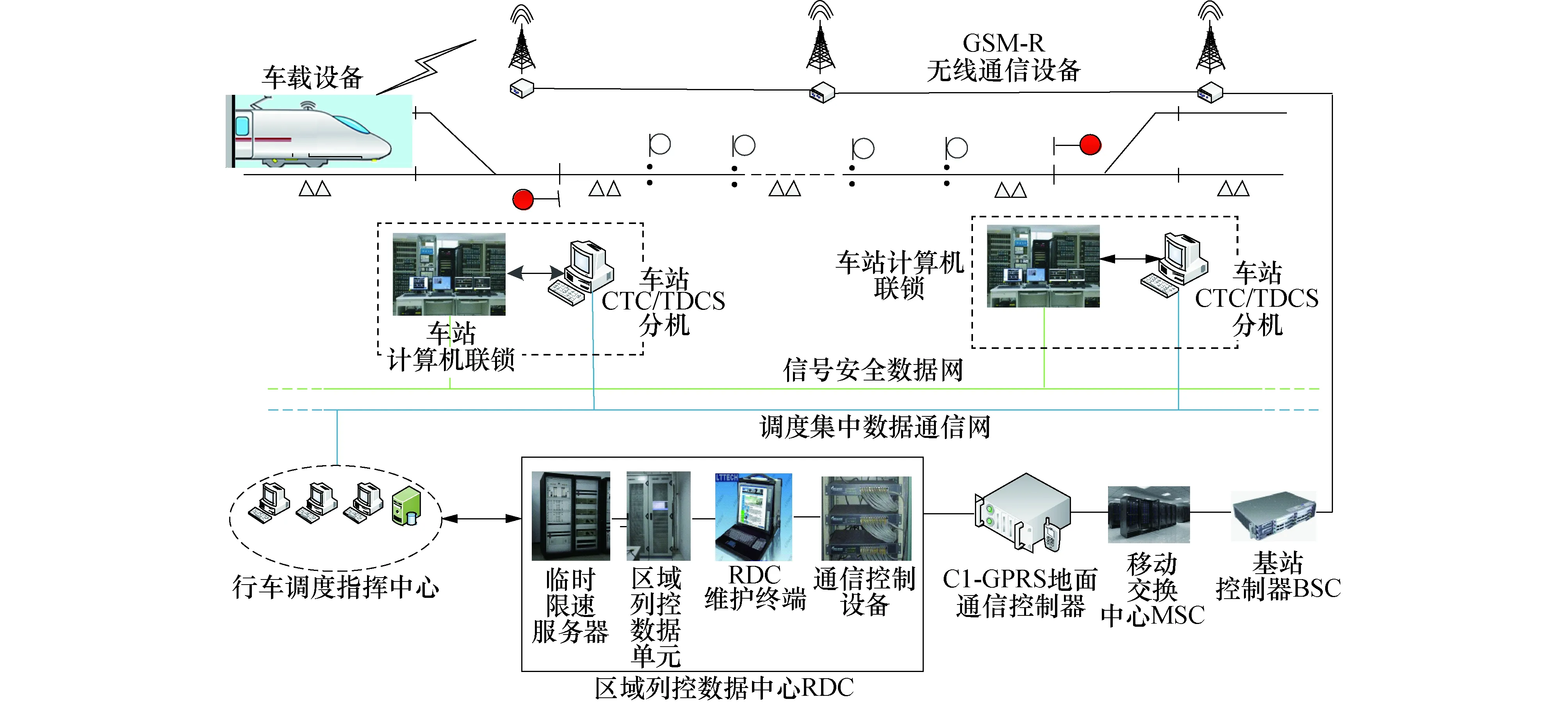
图1 CTCS-1级列控系统结构示意图Fig.1 Schematic diagram of the CTCS-1 train control system
图2是RDC信息交互示意图,RDC为CTCS-1级地面子系统的核心,RDC实现了既有线列控线路数据的统一管理,临时限速实时更新与下达.RDC负责管辖范围内列车的统一管理,根据列车位置报告与轨旁设备信息为列车提供行车所需线路数据、进路和临时限速等信息,并将控车相关数据以GSM GPRS无线通信方式送至车载超速防护设备(Automatic Train Protection,ATP).CTCS-1级车载ATP根据RDC发送的行车数据和轨道电路低频码序信息生成目标-距离控车曲线监控CTCS-1级列车以低于200 km/h速度运行.
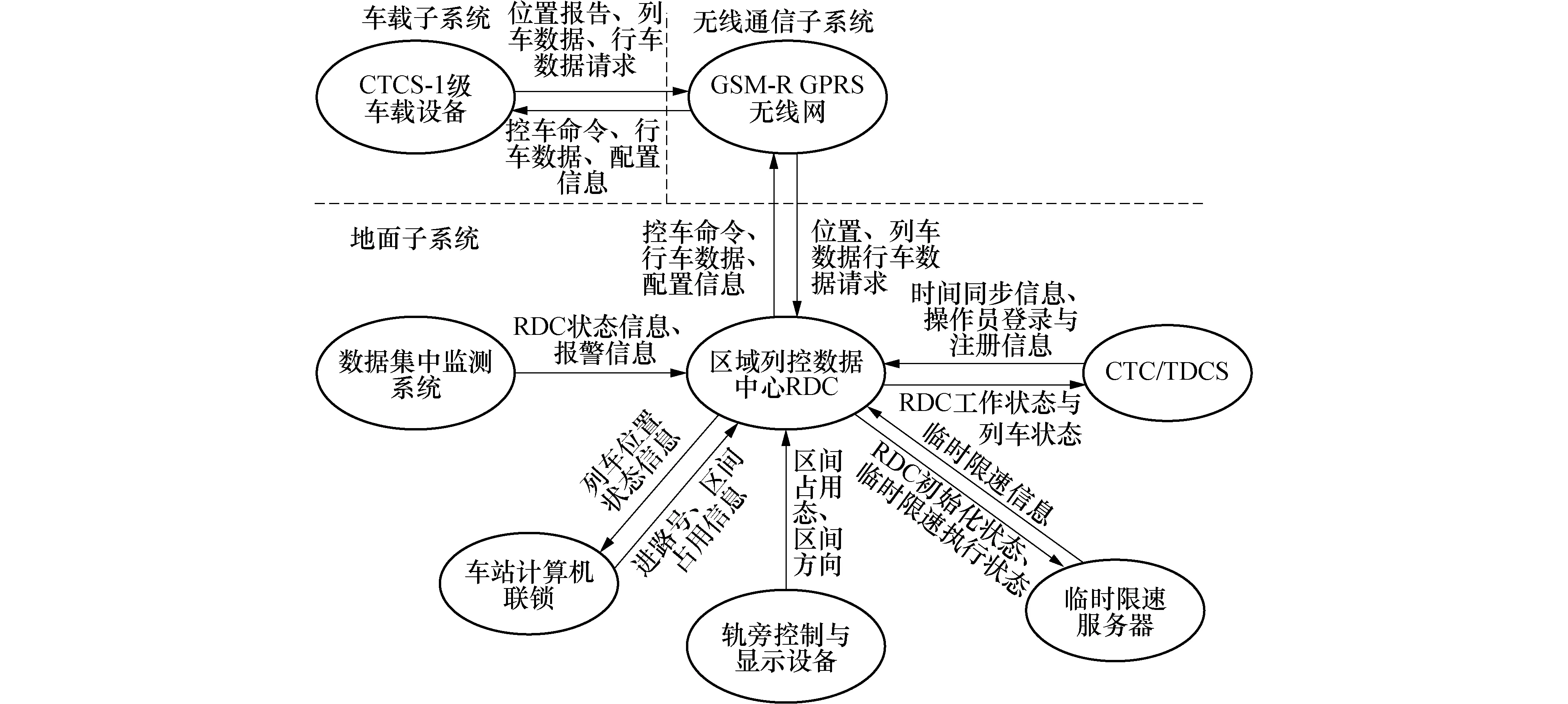
图2 RDC信息交互示意图Fig.2 RDC information interaction diagram
2 车地信息交互过程分析
CTCS-1级线路相邻RDC管辖边界点在站分界处,相邻RDC存储的静态线路数据在边界点存在交织冗余.移交RDC(RDC1)静态线路数据延伸到接收RDC(RDC2)进站口,接收RDC静态线路数据延伸到移交RDC(RDC1)反向进站口,相邻RDC管辖范围及列车移交场景示意图如图3所示.
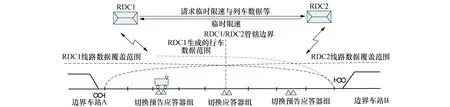
图3 相邻RDC管辖范围及列车移交场景示意Fig.3 Illustration of the neighborhood RDC jurisdiction and train handover scenarios
由CTCS-1级列控系统应答器报文应用原则知RDC管辖边界两侧分别设立切换执行应答器组、切换预告应答器组和切换标志牌[9].CTCS-1级列车(简称C1车)运行至切换预告应答器组上方,车地开启列车移交流程,列车最大安全前端运行至切换执行应答器组上方时,执行RDC控车权移交.图4为CTCS-1级列控系统单电台列车移交时车地信息交互的3个阶段:1)图4(a)为列车车头(最大安全前端)运行至预告应答器组上方时车地信息交互图.2)图4(b)为列车车头运行至执行应答器组上方时车地信息交互图.3)图4(c)为列车车尾(最小安全后端)运行至切换执行应答器上方时车地信息交互图.C1车最小安全后端到达切换执行应答器组时,车载设备再次向移交RDC发送位置报告,移交RDC得知列车全部越过边界点后,向车载设备发送终止通信会话的命令,车载设备收到该命令后,开启注销流程,移交RDC最后将该列车从管理列表删除.车载设备与移交RDC断开通信链接后,根据之前接收的切换命令,C1车载电台呼叫接收RDC,呼叫成功后,与接收RDC开启新的通信流程并建立通信会晤,至此相邻RDC列车移交任务完成.列车移交过程车载设备与移交RDC断开通信链接,且与接收RDC建立链接前,车地处于通信中断过程.
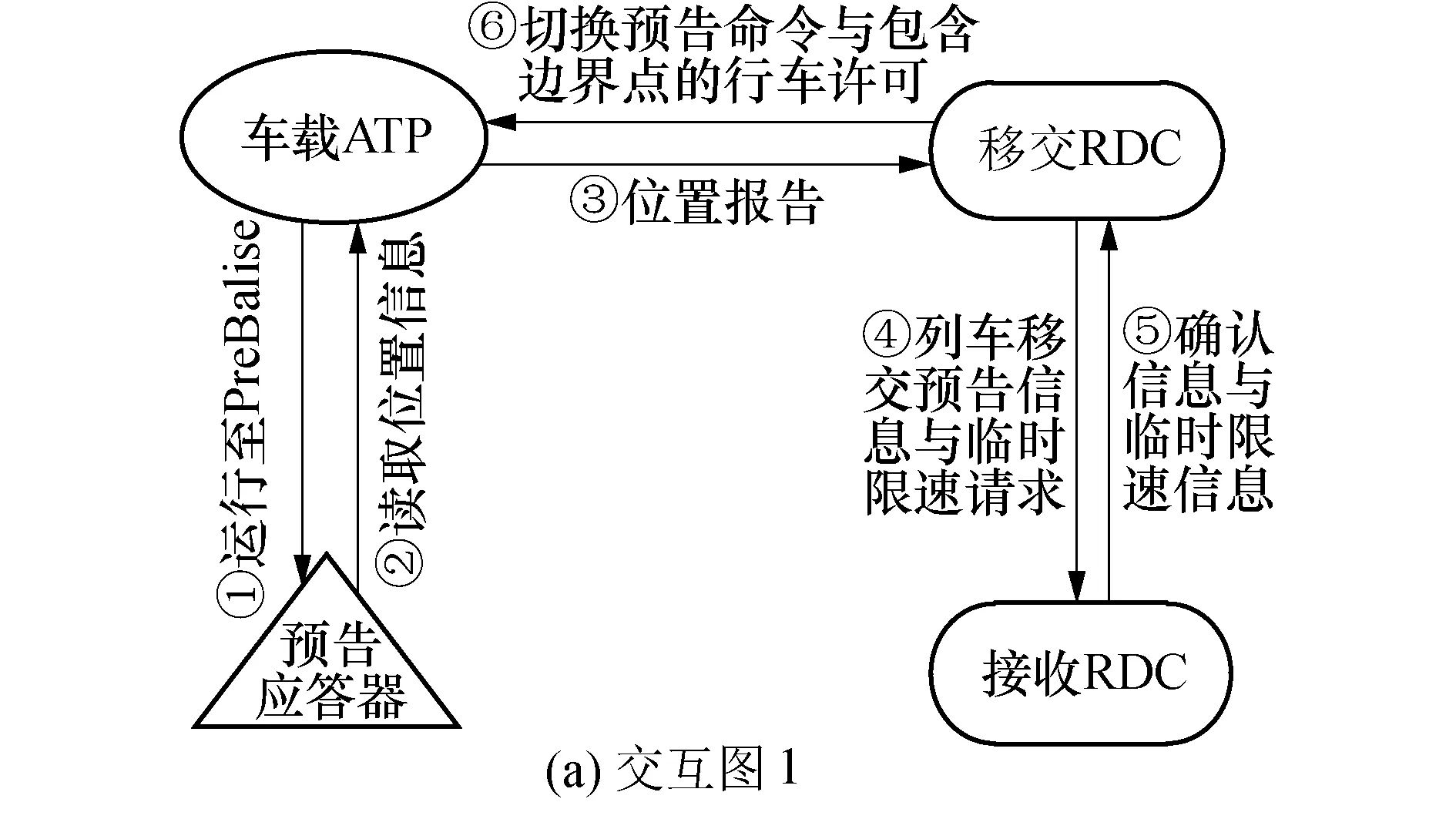
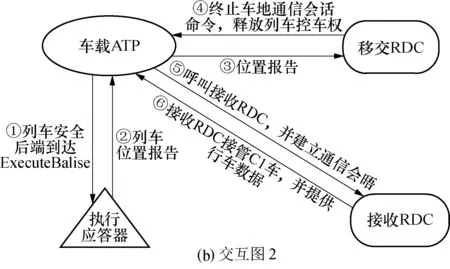
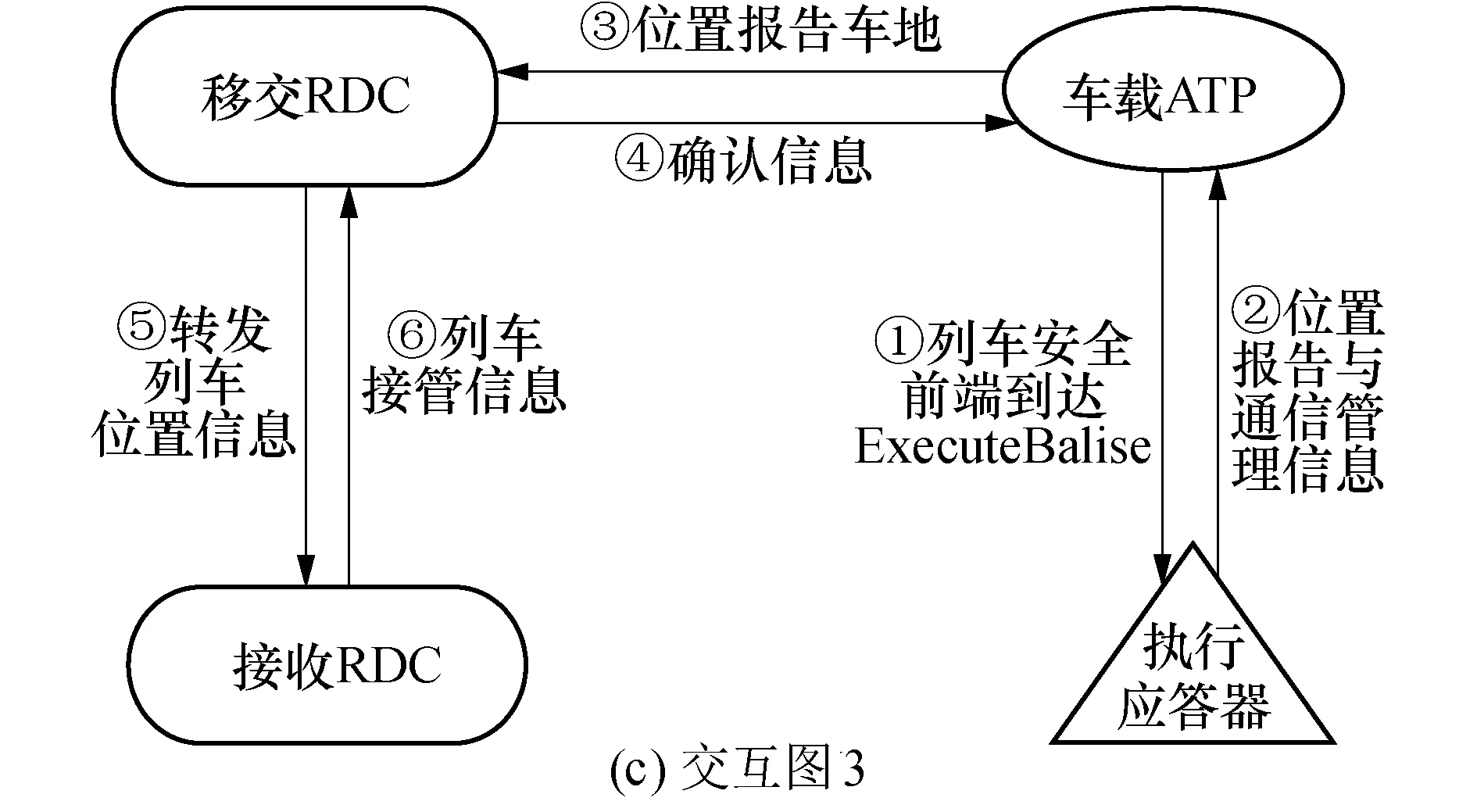
图4 列车移交车地信息交互Fig.4 Information exchange of train handover
3 列车移交过程建模
3.1 TCPN形式化方法
TCPN是基于系统建模语言(ML)的形式化方法.ML语言强调采用数学的思想分析问题,大量的计算可以在几行之内表达清楚,语言类型检测器可以检测常见错误,根据ML语言开发的系统具有稳定,不易崩溃的特点[10].TCPN模型以图网方式模拟被建模对象,以库所、变迁、有向弧与托肯等简单图形较好的模拟并发、同步、因果等关系,且能精确的、无二义性的描述系统特征,适用大型系统的设计、说明、仿真确认和实现.
3.2 RDC列车移交过程建模
本文采用TCPN方法对RDC进行形式化建模与验证分析,流程如图5所示.
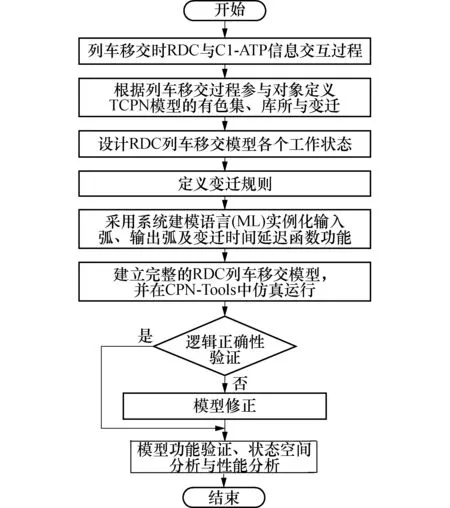
图5 基于TCPN的形式化建模与验证分析方法Fig.5 Formal modeling and verification analysis method based on TCPN
3.2.1 RDC列车移交模型初始化
细化列车移交过程,将不同工作状态下的RDC、C1-ATP抽象成不同库所,根据RDC、C1-ATP状态变化过程定义变迁及变迁规则,根据RDC、C1-ATP传递信息的特性,定义TCPN模型库所色集.此外需要在变迁处设置时间延迟函数模拟C1车从移交RDC注销、到再接收RDC完成注册所用的时间.模型初始化过程十分关键,有色集、库所、变迁与变迁规则的合理定义是保证所建模型与系统需求一致性的基础,也是保证模型功能正确性与完备性的前提.RDC列车移交模型有色集、变量与函数声明如下
colset Msg=string timed;
var msg,msg1,msg2,msg3,msg4,msg5,msg6,msg7,msg8,msg9,msg10,msg11,msg12,msg13,msg14,msg15,msg16,msg17; Msg;
val Time 1=30;
val Time 2=35;
val Time 3=40;
val Time 4=8;
val Time 5=10;
val Time 6=15;
val Time 7=20;
closet Percent=int with 0,…,100 timed;
fun Per()=Percent.ran();
fun TotalTime()=IntInf.toInt(time());
模型中自定义有色集为Msg,Percent;Msg为带有时间属性字符串变量组成的有色集,该有色集包含车载设备与RDC状态改变时传递的信息流变量;ML发生函数fun Per()=Percent.ran()为1~100范围内随机数发生函数,模拟车地通信过程中车载设备连接GSM-R网络、车载设备从呼叫到注册RBC成功的概率.fun TotalTime()=IntInf.toInt(time())为时间收集函数,负责统计车载设备连接GSM-R网络、车载设备从呼叫到注册RDC及车载设备与RDC数据交换时间.
3.2.2 建立RDC列车移交场景TCPN模型
1)确定模型时间参数.CTCS-1级列控系统设备目前仍处于实验室联调阶段,无法获取单电台列车移交过程各阶段时间参数,但CTCS-1级列控系统与CTCS-3级列控系统均采用GMS-R网络通信方式,车-地无线通信过程相似,故本文提取CTCS-3级车地通信各阶段时间数据作为RDC列车移交TCPN模型中的时间参数,以保证所建时间模型准确模拟真实情况.由于CTCS-1级列控设备仍处于开发阶段,参照CTCS-3级列控系统总体技术规范已知时间数据,车地通信各阶段时间参数如下[11]:
①车载设备连接GSM-R网络,30 s成功率95%,35 s成功率99%,40 s成功率应达到100%.
②车载设备从呼叫到注册RBC,8.5 s成功率95%,35 s成功率100%.
③车载设备和 RBC 交换数据的时间为15~20 s,数据包括:配置参数、列车数据、位置报告、等级转换命令、行车数据.
2)建立RDC列车移交场景模拟模型.
①场景时间参数抽象.以第1条时间参数为例,其时间特征分布符合离散型随机变量的特点,时间分布规律归纳为以下数学模型
F(t)=P(x1≤t≤x2),
30≤x1,x2≤40
(1)
②模型时间模拟.上述随机变量概率分布函数在CPN-Tools中不能直接使用,模型模拟时,仍需对数学模型进一步抽象.由时间参数分布规律知,大多数情况下车载设备在30 s内完成GSM-R网络连接,个别情况下延长至35 s,极少情况下超过40 s.而CPN-Tools模型仿真模拟工具具有随机数发生函数与时间延迟函数,借助函数实现时间模拟问题.变迁发射时随机数发生函数随机产生固定范围内的数字,拟定1~100范围内数字,每运行一次产生一个随机数,如果产生的随机数属于1~95,则车载设备注册GSM-R变迁触发延时,变迁30 s后发射,模拟车载设备30 s完成GSM-R网络连接场景.同理,随机数范围为95~99,延时35 s;若随机数为100,延时40 s.由离散型随机变量分布特点知,该模型执行次数越多,时间模拟效果越逼近实际情况.
③构建RDC列车TCPN模型.CPN-Tools中基于单电台的RDC列车移交场景模型如图6所示.
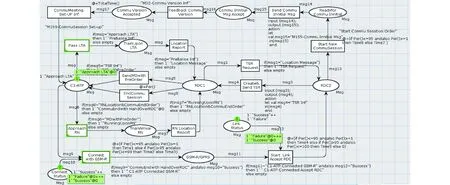
图6 RDC列车移交时间模型Fig.6 RDC train handover time model
该模型从CTCS-1级列车最大安全前端运行至预告应答器组(LTA)开始模拟(对应变迁“Pass LTA”),CTCS-1级列车最小安全后端越过切换应答器组(RN)时车载设备与接收RDC建立通信会晤后列车移交完成(对应“Commu Meeting Set-Up Inf”),模拟过程结束.模型库所与变迁含义如表1和表2所示.
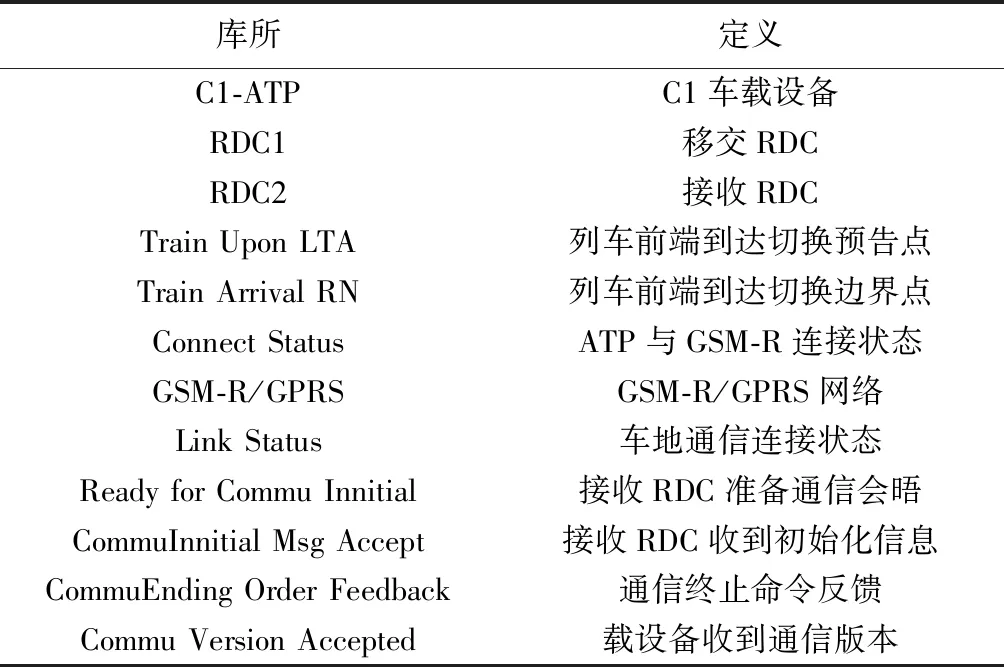
表1 RDC列车移交时间模型库所定义
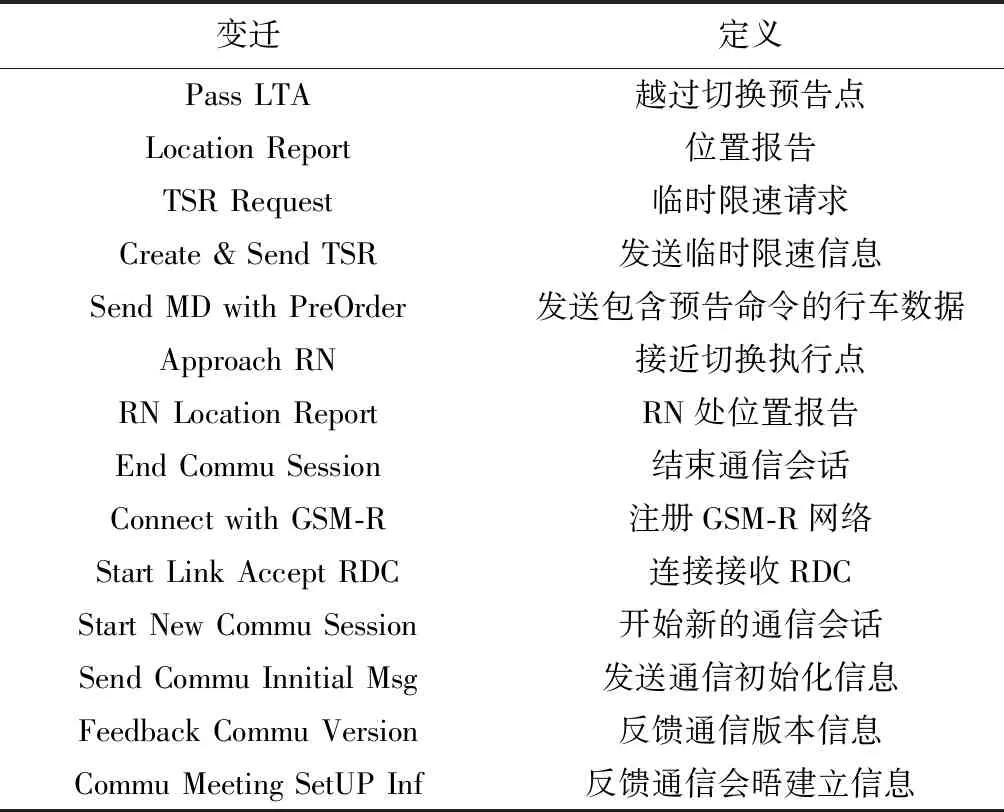
表2 RDC列车移交时间模型变迁定义
列车车头运行至RN时,车载电台与移交RDC断开通信连接,并开始连接注册接收RDC,车载电台在与接收RDC建立通信会晤前,车地处于通信中断过程,模型采用时间模拟函数对该过程进行模拟.模型信息流传递过程如下:C1-ATP→PassLTA→TrainUponLTA→LocationReport→RDC1→TSRRequest→RDC2→Create&SendTSR→RDC1→SendMDwithPreOrder→C1-ATP→ApproachRN→TrainArrivalRN→RNLocationReport→RDC1→EndCommuSession→C1-ATP→ConnectwithGSM-R→GSM-R/GPRS→StartLinkAcceptRDC→RDC2→StartNewCommuSession→ReadyforCommuInn itial→SendCommuInnitialMsg→CommuInnitialMsgAccept→FeedbackCommuVersion→CommuVersionAcceptd→CommuMeetingSet-UpInf→C1-ATP.
4 TCPN模型仿真验证结果分析
为验证模型正确性,需将所建TCPN模型在CPN-Tools验证工具中模拟运行,通过对比分析系统需求和模型运行结果,修正模型.然后通过设置库所不同的初始托肯(Token)值,模拟RDC不同工作场景,实现RDC模型功能的逐一验证;CPN-Tools支持所建模型的穷举搜索,通过设置特定参数值生成模型状态空间报告、可达图与模型运行时间,验证模型功能正确性、完备性与模型时间性能.
4.1 RDC列车移交TCPN模型功能验证
首先验证RDC列车移交模型逻辑功能,本小节对列车移交模型的车地信息交互的功能进行验证,选取3个典型场景,具体验证内容及结果见表3.其中:场景1为C1车运行至LTA上方时,RDC切换前准备场景;场景2为C1车车头运行至RN上方时,控车权移交开始;场景3为C1车车尾运行至切换应答器组上方时,C1车与RDC1断开通信会晤,开始与RDC2建立通信会晤.
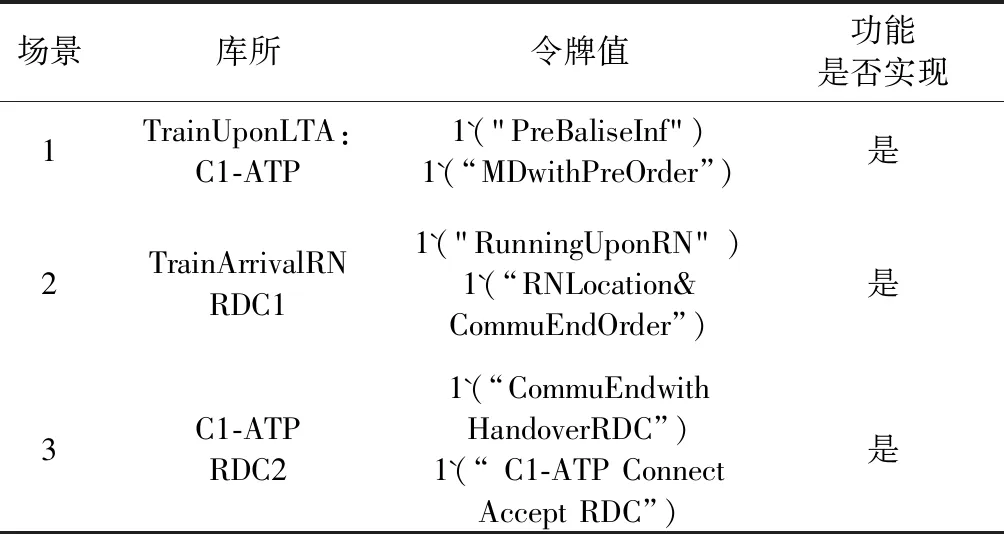
表3 RDC列车移交时间模型变迁定义表
4.2 可达性与状态空间分析
4.2.1 可达性分析
借助Status Space工具生成模型状态空间可达图如7所示.由可达图知,RDC列车移交模型有24个可达状态节点,28条有向弧.起始状态与终止状态之间存在多条可达路径,系统模型在不同约束条件下至少存在一条可达路径,保证模型的成功执行.
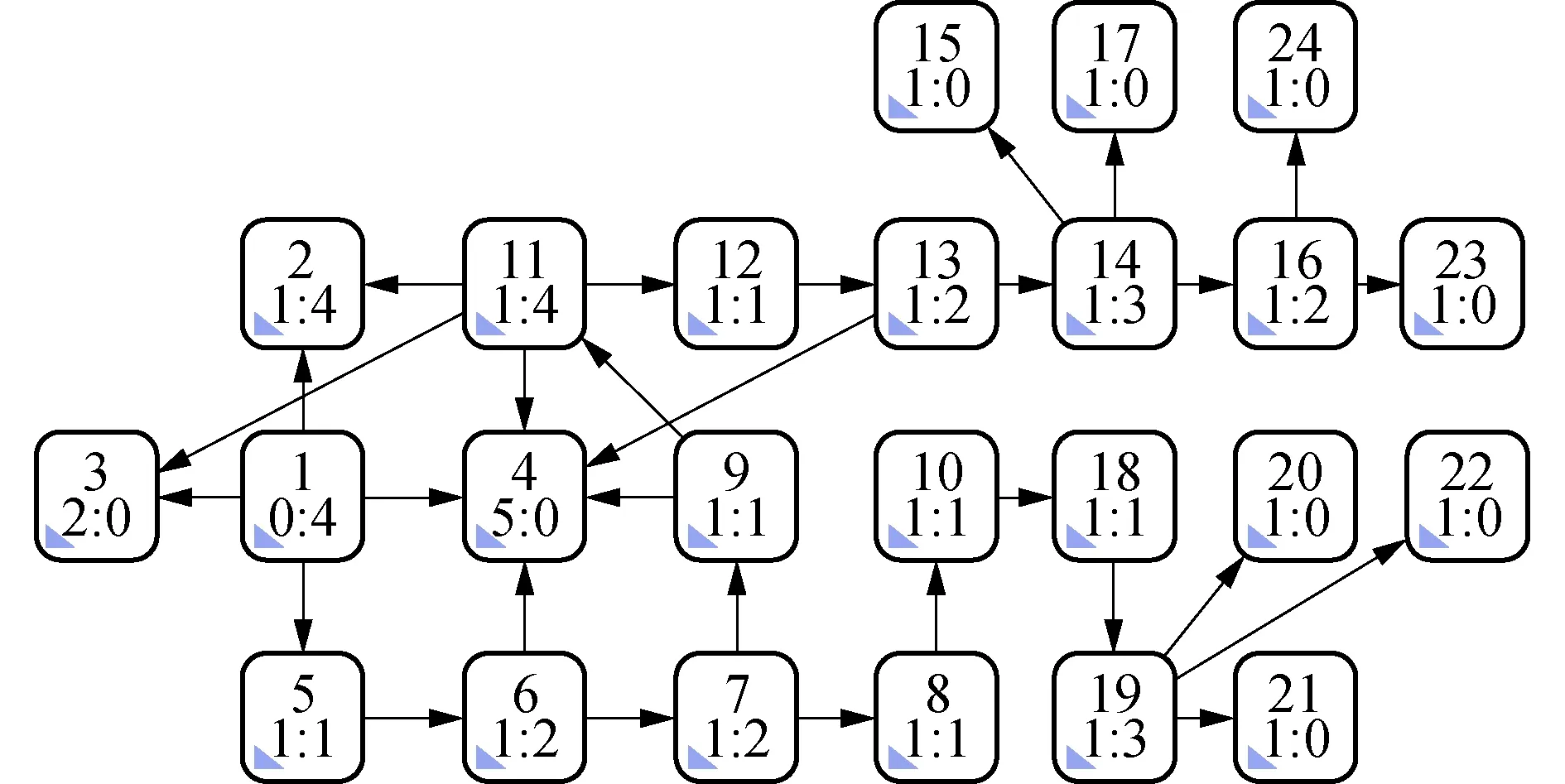
图7 RDC列车移交模型状态空间可达Fig.7 State space reachability map of RDC train handover model
4.2.2 有界性分析
RDC列车移交模型状态空间规模统计显示移交模型中有24个状态节点与28条有向弧,与模型状态空间可达图数据一致,状态节点与有向弧数目说明RDC列车移交模型整体有界.RDC列车移交模型有界性报告如表4所示.表4显示模型状态变化过程中每个库所均具有令牌的上界与下界,大部分库所具有令牌的下界为0,说明模型执行前该库所初始状态为空,而具有令牌的上界均为1,说明连接该库所的变迁使能发射过,令牌流入该库所;个别库所令牌上界为2,下界均为1,说明该库所最多拥有2个令牌,模型执行过程中有令牌流出,库所最终有1个令牌.上述两种情况说明模型中库所拥有的令牌数量在某一确定范围内,模型状态空间整体有界,库所拥有的令牌数目确定,模型有界性良好.
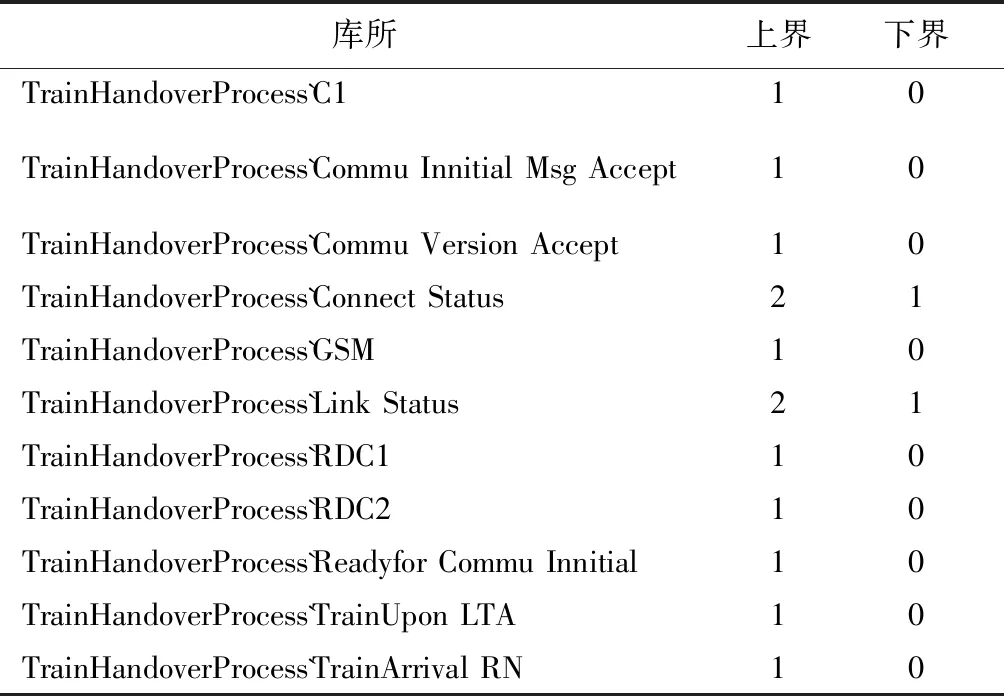
表4 RDC列车移交模型有界性报告
4.2.3 家态性、活性与公平性分析
由RDC列车移交模型状态空间家态性、活性与公平性报告可得:该模型不存在单个或多个令牌在模型执行过程中重复回到某一库所的现象,故该模型不具有家态性.状态节点15、17、20、21、22、23和24是该模型的几个死标志(不再向下传递的标志),分别表示车载设备连接GSM-R GPRS网络、车载设备连接RDC过程成功(令牌值为“Success”)与失败(令牌值为“Failure”)时列车移交场景出现的几种结果,是该模型设计的最后一个状态,符合设计初衷.模型中不存在未使能发射的变迁,表明该模型可执行性强,具有良好的活性.报告显示该状态空间中不存在无限循环的状态序列,模型执行过程中各状态对系统资源占用情况基本相同,模型具有公平性.
4.3 模型时间性能分析
RDC列车移交模型在C1-ATP与移交RDC通信终止时开始计时(对应变迁“End Commu Session”),C1-ATP与接收RDC建立通信会晤时计时结束(对应变迁“Commu Meeting Set-Up Inf”).车地通信中断计时开始点设置随机数发生函数“Per()=Percent.ran()”,在通信中断计时结束点设置时间统计函数“TotalTime()”.变迁“Connect with GSM-R”、“Start Link Accept RDC”与“Start New Commu-Session”3个变迁分别设置延时函数,以变迁 “Connect with GSM-R”的延时函数“@+(if Per()<=95 andalso Per()>=1 then Time1 else if Per()>95 andalso Per()<=99 then Time2 else Time3) ”为例对延时函数含义进行说明.如果随机数函数Per()产生的数字在1~95范围内,则执行Time1(30 s)延时,若随机函数Per()产生的数字在95~99之间,则执行Time2(35 s)延时,否则执行则执行Time3(40 s)延时,以此模拟车载设备不同情况下连接GSM-R网络成功时所需时间.模型其他两个延时函数同理.模型运行完毕由函数TotalTime()记录整个切换过程通信中断时间.
列车移交模型“Connect with GSM-R”,“Start Link Accept RDC”和“Start New Commu Session”等变迁调用延时函数分别模拟车载设备连接GSM-R GPSR网络、注册接收RDC和建立通信会晤时信息传输与处理过程;变迁“Commu Meeting Set-Up Inf”设置时间统计函数,统计列车移交过程车地重新建立通信会晤耗时(即C1-ATP与RDC通信中断时间).利用CPN-Tools 数据收集(Data Collection)功能收集上述变迁时间函延时累计数据,见表5.表5为模型运行10次情况下,时间数据的记录.
由统计数据知,模型10次仿真模拟中,车载设备在30~35 s内能成功连接GSM-R网络;车载设备与接收RDC在8~10 s之间完成注册;车载设备与接收RDC通信会话初始化完成时间为15 s.单电台列车移交时车地通信中断的时间为上述三段时间之和,由统计结果知C1车载设备与RDC通信中断时间最短为53 s,最长为60 s,平均时间为53.7 s.10次仿真模拟数据可能与实际数据还存在一定偏差.为此对模型进行了1 000次仿真模拟,处理后的数据如表6所示.
表5RDC列车移交模型时间数据统计
Tab.5TimedatastatisticsofRDCtrainhandovermodel

变迁累计值最大数据最小数据平均值 TrainHandoverModel`Connection with GSM-RTrainHandoverModel`Start Link Accept RDCTrainHandoverModel`Start New Commu SessionTrainHandoverModel` Commu Meeting Set Up Inf3058215054235101560308155330.58.215.053.7
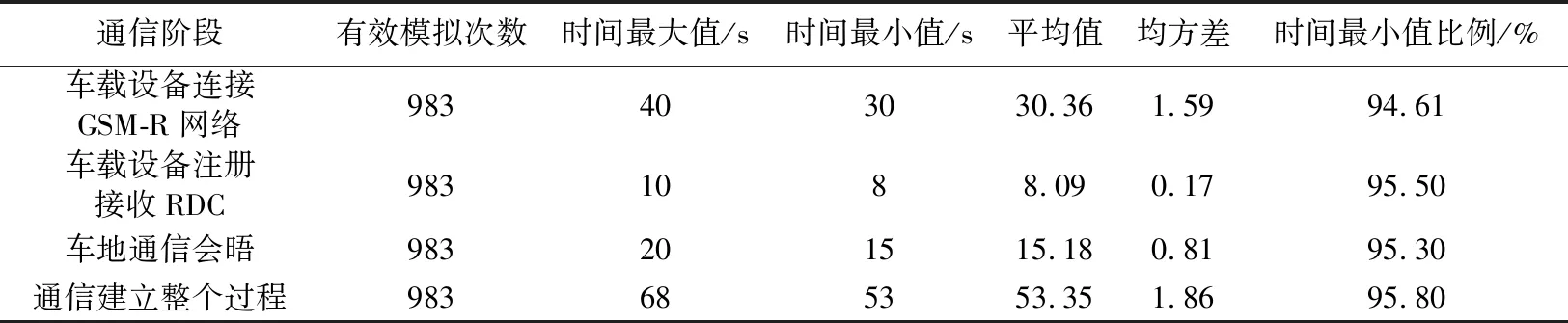
表6 车地通信中断时间数据
表6的仿真数据中,个别数据与技术规范中时间参数偏离较大,数据处理时认为是异常数据被剔除,剩余正常时间数据共983份.通过分析发现,本次所得数据与表5数据具有一致性,二者各通信阶段时间范围与平均值相近,但边界值不同.车载设备注册接收RDC时间范围没变,但车载设备连接GSM-R网络时间扩展为30~40 s,车载设备与接收RDC通信会话建立时间扩展为15~20 s.表6中时间最小值比例代表各通信阶段时间范围下界在仿真实验中出现的概率,各阶段时间最小值出现概率在95%附近,与技术规范中时间指标相符;另外其时间均方差都很小,说明测得时间数据波动不大,离散度低,数值集中在平均值附近,符合离散事件数据分布特点.表6中时间数据更全,更接近实际情况,据此可大致确定CTCS-1级列控系统单电台列车移交时,RDC与车载设备允许通信中断的时间范围.由通信建立整个过程时间数据知,通信中断时间均值为53.35 s,最短时间为53 s,最长时间68 s,由此知CTCS-1级列控系统单电台列车移交时,RDC与车载设备通信中断时间仿真值为53~68 s.
车地通信中断过程,列车以一定速度越过RDC切换边界,该过程列车走行距离即为RDC确定管辖边界车站时需考虑的距离约束,相邻RDC管辖边界车站的进站口与切换边界距离大于距离约束时,才能保证单电台RDC切换场景下,CTCS-1级列车控车权在移交RDC、接收RDC间的安全、可靠交接.CTCS-1列车最高运行速度为200 km/h,本文采用该速度计算距离约束,确保所得的距离约束覆盖RDC设置时需满足的最苛刻情况.单电台列车移交时列车走行距离为2 944.4~3 777.8 m ,设置RDC管辖边界时,管辖边界点与上/下行边界站进站口之间的距离要大于3 777.8 m,才能保证控车权在移交RDC和接收RDC间安全、可靠的交接,满足该距离约束的车站才能设置为RDC管辖边界站.针对RDC下辖的对一站多场、多个车站密集分布的情况,尽管管辖的车站数目符合RDC技术规范,若管辖边界与进站口之间的距离不满足该距离约束,相邻两站区间亦不能设置RDC管辖边界,RDC管辖范围要作特殊情况处理.
5 结论
本文对CTCS-1级列控系统单电台列车移交场景下车地通信中断过程进行剖析,通过在CPN-Tools仿真环境下模拟运行RDC列车移交模型,获得CTCS-1级RDC切换过程车地通信中断时间参数,进而获得设置RDC管辖边界点要参考的距离参数.模型仿真运行结果及计算结果表明:
1) 基于单电台的RDC切换,车地通信中断时间范围为53~68 s;
2) 时速200 km/h的CTCS-1级列车在控车权移交时走行距离为2 944.4~3 777.8 m,设置RDC管辖边界时,边界点与上/下行边界站进站口之间的距离要大于3 777.8 m,才能保证CTCS-1级列车控车权在移交RDC和接收RDC间安全、可靠交接,确保CTCS-1级列车刚进入接收RDC管辖区域即可获得实时更新的线路、进路与临时限速等行车数据.
猜你喜欢
汽车实用技术(2022年10期)2022-06-09
快乐语文(2021年27期)2021-11-24
家庭影院技术(2021年3期)2021-05-21
航天工业管理(2020年9期)2020-12-28
软件(2020年3期)2020-04-20
汽车维修技师(2019年7期)2020-01-16
科技传播(2019年22期)2020-01-14
汽车维修与保养(2019年3期)2019-06-19
汉语世界(The World of Chinese)(2019年1期)2019-03-18
海峡姐妹(2018年5期)2018-05-14
