
改进Census变换的铁路扣件定位方法
2019-06-01 06:22邬春明郑宏阔
北京交通大学学报 2019年2期
邬春明,郑宏阔
(东北电力大学 电气工程学院,吉林 吉林 132012)
铁路扣件是铁路的重要组成部分,扣件缺陷会对铁路安全造成很大的安全隐患,因此加强对铁路扣件的安全检查刻不容缓[1].近年来,图像处理技术已经被运用到扣件检测以代替人工巡查[2-3].由于实际采集的扣件图像中扣件部分所占比例较小,如果在原图像中搜索扣件必然导致计算量较大,所以为了降低运算时间并减少图像中道砟区域对扣件识别的干扰,在扣件识别之前,需要对扣件进行快速准确的定位.
文献[4-5]采用“十字交叉法”,对图像进行直方
图均衡化、sobel算子垂向边缘检测,然后通过区域亮点统计确定钢轨左边界及轨枕上边界,从而确定扣件位置.但由于轨枕和钢轨的表面特征在不同光照下差异较大,不利于扣件定位.文献[6-7]对“十字交叉法”进行改进,在原图像中截取尽可能少包含扣件的部分,以减少后续处理范围;通过中值滤波、canny算子边缘提取及灰度投影的方法进行定位.该方法一定程度上提高了定位准确率,但canny算子对不同光照情况下阈值的选取十分敏感,增加了算法复杂度.文献[8]利用LSD直线检测方法快速检测出钢轨和轨枕的边界,并根据扣件与钢轨、轨枕的先验知识实现定位.但由于铁路长期通车导致钢轨和轨枕边缘磨损较大,所以边界特征并不连续,导致定位精度降低.文献[9]提出使用不同图像特征通过扣件粗定位、扣件精确定位两步法实现扣件区域的精确定位.该方法能够有效地降低光照和线路弯曲等因素对扣件定位的影响,与其他定位方法相比,该方法可以定位到更小的区域.
针对上述问题,本文作者提出利用挡板座与轨枕接触边界的直线特征来定位扣件,该特征在不同光照情况下相对稳定,相较于钢轨和轨枕的边缘特征而言,更有利于扣件的精确定位.
1 基于中值滤波的图像去噪
本文的定位过程主要分3步,具体定位流程为1)输入图像;2)中值滤波;3)改进Cestus变换的边缘特征增强;4)基于聚类的直线特征提取.
由于实地采集的扣件图像必然会受到各种噪声干扰,故而在对扣件进行定位之前,先对图像进行去噪处理,以削弱噪声对图像后续处理的影响[10].本文采用的是中值滤波[11],一定条件下可以克服均值滤波带来的图像细节模糊,能够很好地保留边缘信息.选取晴天和雨天两种自然情况下的扣件图像进行研究,选用5×5的中值滤波器,滤波结果如图1所示.
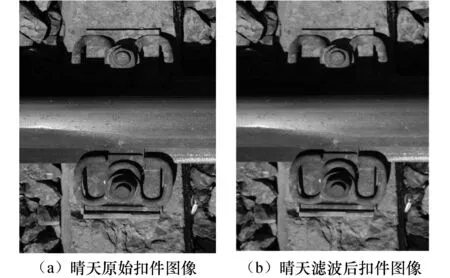
图1 中值滤波前后图像Fig.1 Images before and after median filtering
2 改进Census变换的边缘特征增强
2.1 传统Census 变换
Census 变换[12-13]是一种用于局部立体匹配的非参数变换,基本原理是以某像素(u,v)为中心选一个窗口,然后比较窗口中每个邻域像素与中心像素灰度值的大小,如果小于中心像素,则对应像素位置为1,否则用0表示.表达式如下
(1)
式中:C为变换结果;p1为中心像素;p2为窗口中邻域像素.则Census变换表达式为
(2)
式中:运算符⊗代表位连接运算;I(u,v)代表中心像素的Census变换比特串;m、n分别表示窗口的行和列;i、j代表以中心像素为坐标原点遍历窗口所有像素点.
2.2 改进Census变换
传统的Census变换能够有效削弱光照强度变化对图像的影响,但存在以下缺陷:1)传统的 Census 变换中过度依赖中心像素,当中心像素受到噪声干扰发生畸变时,对变换结果会造成很大影响;2)没有充分利用像素间的相关信息,在光照不理想时容易导致误匹配.为克服上述问题,通过改进Census 变换进一步提高光照变化的鲁棒性.
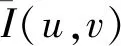
将变换窗口分为4个子领域(图2左上方、右上方、左下方、右下方),分别求中心像素子领域的灰度分布均匀度,并选取均匀度最小的子领域像素均值代替中心像素.均匀度计算表达式为
(3)
(4)
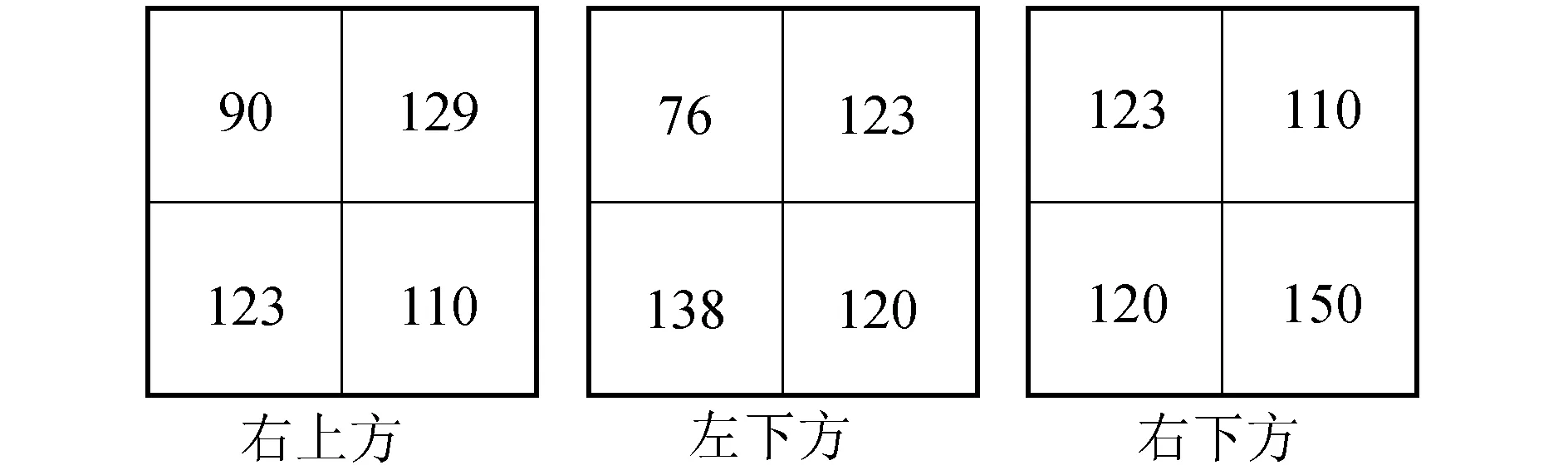
图2 Census变换窗口Fig.2 Census transform window
为验证该方法的有效性,将该方法与sobel算子、canny算子边缘增强的结果进行比较,见图3.图3(a)、(b)、(c)、(d)中上、下图分别为晴天和雨天的扣件图像处理结果.
从图3可看出,sobel算子、canny算子对阈值的选取十分敏感,在不同光照条件下边缘检测的效果差异较大,且所提取的挡板座边界直线特征出现了断裂;而本文方法并不需要考虑阈值的问题,不论在何种光照条件下都能稳定地提取挡板座边界特征,且所提取的边界特征也较其他方法更加清晰,更有利于后续的直线检测.
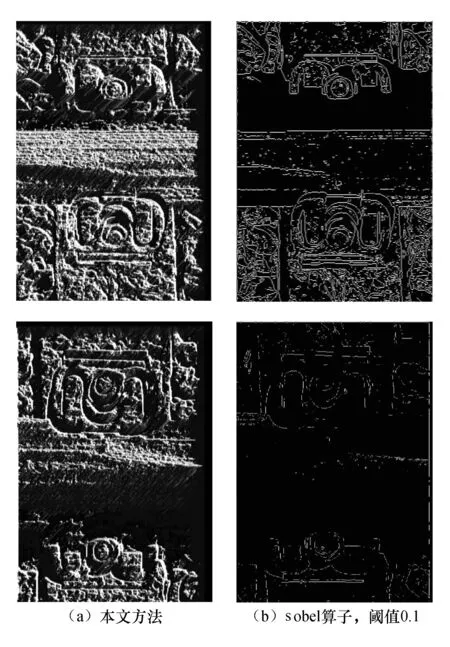
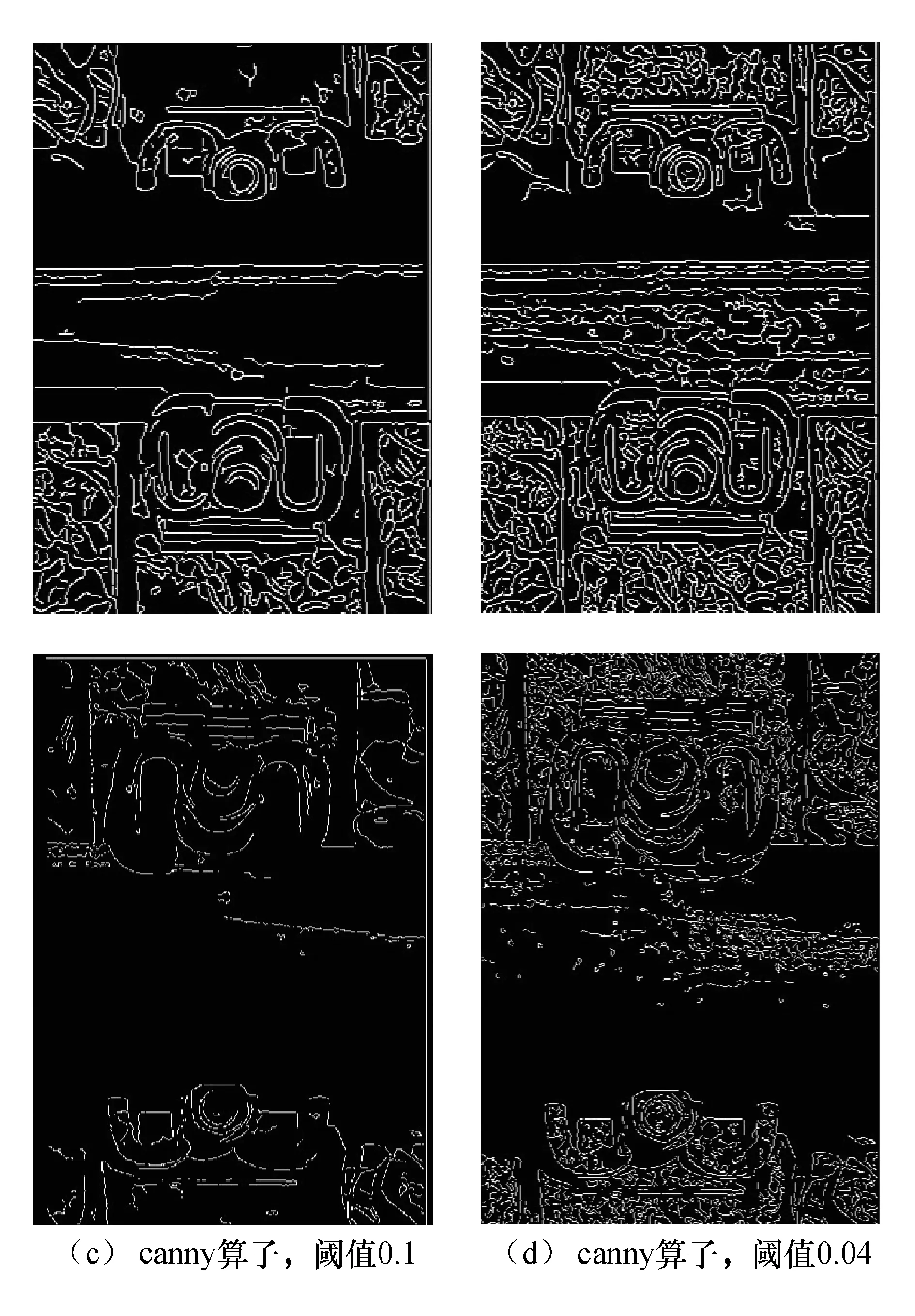
图3 挡板座边缘增强结果Fig.3 Edge enhancement of the baffle seat
3 改进Hough变换的直线特征提取
3.1 Mean-shift聚类
Mean-shift聚类[14-16]是一种基于核密度估计的简单有效的非参数迭代模式搜索算法,应用于图像分割的具体过程是首先进行概率密度估计,然后通过模式搜索找到收敛点,利用收敛点对图像进行滤波,最后完成图像分割.
假设初始点x所在窗口有n个样本xi,x的核函数为G(x),误差阈值为ε,则Mean-shift算法寻找密度极大值的过程如下:
1)在样本中随机选择一个搜索区域圆,计算搜索区域中所有样本点的平均值m(x).
2)计算均值与圆心之差,记为mh,G(x);若||mh,G(x)||<ε,表示找到局部概率密度最大处,算法结束,否则执行步骤3).
3)将mh,G(x)+x赋予x,以新的x所在窗口为当前窗口,执行步骤1),重复以上步骤,直到密度变化小于ε,则收敛到密度极大值点.
Mean-shift聚类算法能够将图像按照内容分割成许多小的区域,保护图像大尺度边界信息的同时,去掉了部分小尺度的细节信息,有利于后续的直线检测.聚类结果如图4所示.
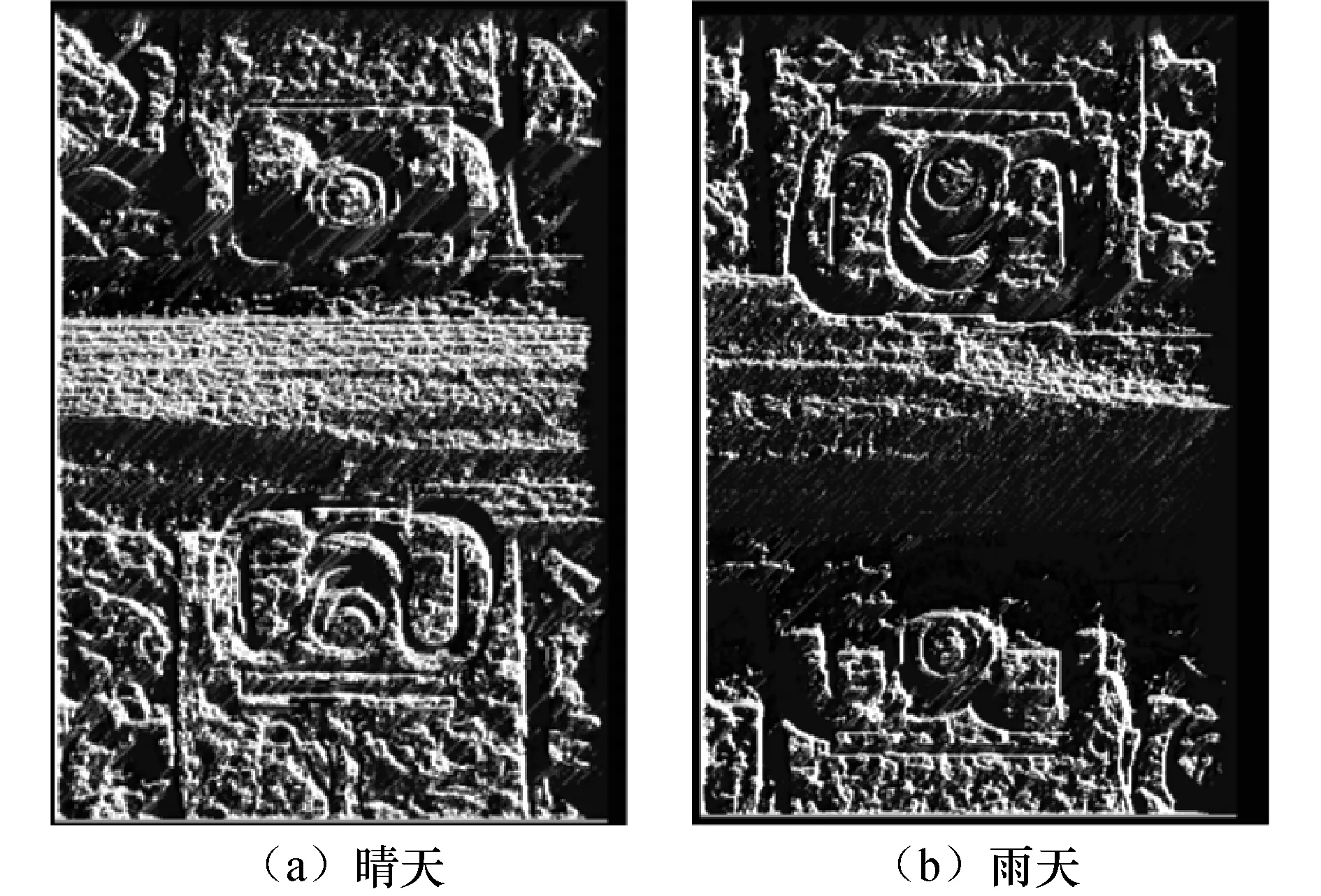
图4 挡板座边缘聚类结果Fig.4 Clustering results of baffle seat edge
3.2 直线特征提取
Hough变换[17-18]是基于图像域与参数域的点与线的对偶特性来完成直线检测,即在图像空间里共线的点对应参数空间中相交的线;反过来,参数空间里相交于同一个点的全体直线在图像空间中都有与其对应的共线的点.Hough 变换公式如下
ρ=xcosθ+ysinθ
(5)
式中:ρ为原点到直线的距离;θ为直线与横轴的夹角.
Hough变换检测直线的流程为1)输入图像;2)提取灰度图像边缘;3)Hough变换得到变换矩阵图像;4)计算检测图像中的直线.
在实际应用中,通常将参数空间离散化成一个累加器阵列A(ρ,θ),然后按极坐标方程,将图像空间中每一点(x,y)映射到参数空间对应的一系列累加器中,并将对应累加器加1. 若图像空间中存在一条直线,则参数空间中有一个对应的累加器出现局部最大值,通过检测该局部最大值即可确定与该直线对应的一对(ρ,θ)参数,从而检测出直线.
由先验知识可知,挡板座边缘直线长度大约为120像素左右,故检测过程中只搜索长度在110~130像素之间的直线特征.另外,由于两个扣件关于钢轨呈对称关系,且两条直线相距320像素左右,所以只需检测出一条直线即可判断扣件位置,检测结果如图5所示.
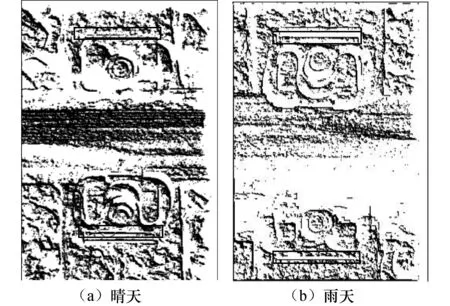
图5 挡板座边缘直线检测结果Fig.5 Line detection results of baffle block edge
4 实验结果及分析
本文采集了吉林—长春铁路线的部分扣件,选取1 000张图像作为样本,其中晴天与雨天图像各500张,采用主频为2.5 GHz的计算机和Matlab2015b进行仿真实验.根据先验知识,扣件范围大约为120×80像素,通过本文方法实现扣件定位,定位结果如图6所示.
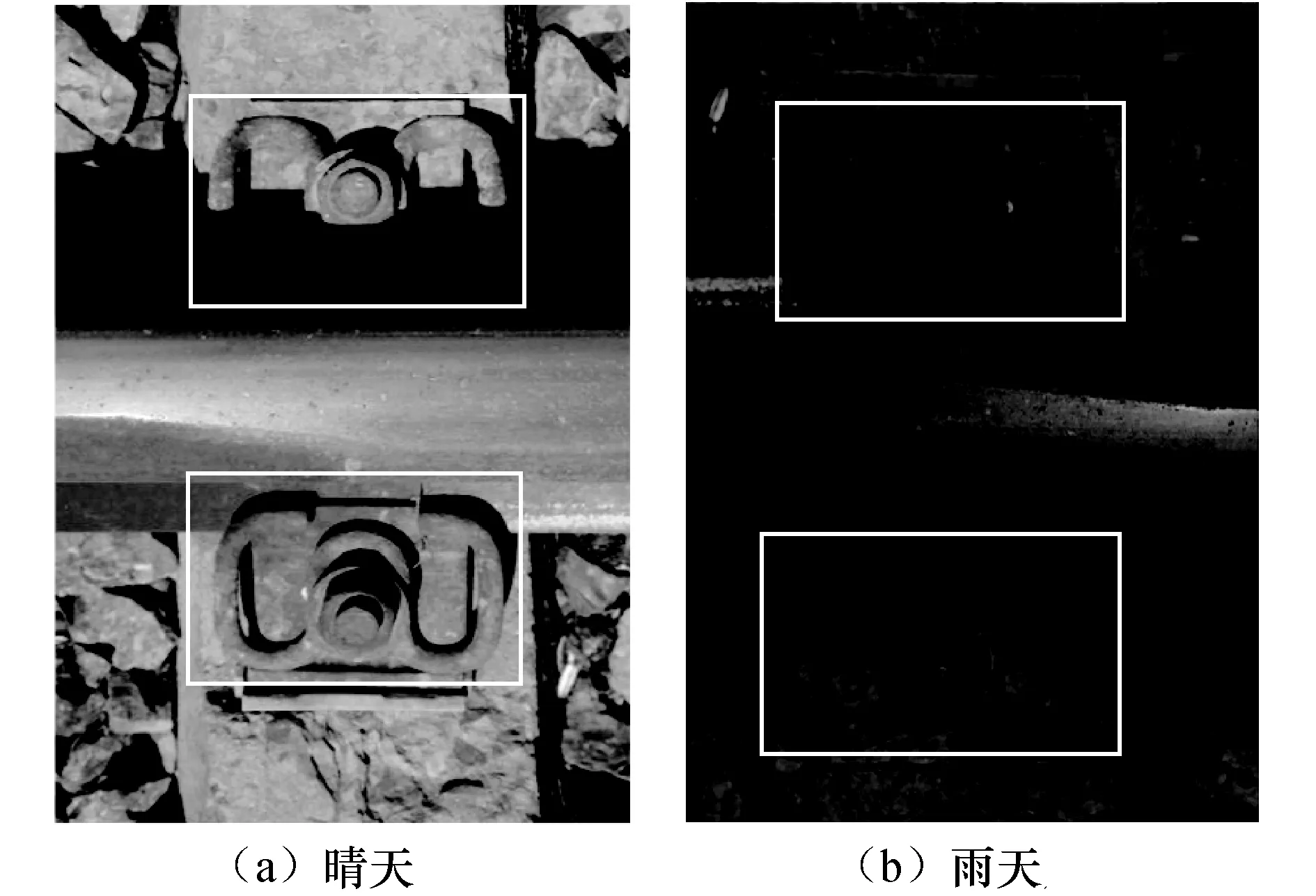
图6 最终定位结果Fig.6 Final positioning results
在实际情况中,实际线路的扣件图像挡板座区域不可避免的会受到遮挡,在只有一条挡板座边缘被遮挡的情况下,如图7所示,通过改进Census变换增强后的挡板座边界仍清晰可见,因此可根据上下两个挡板座的对称关系实现对另一扣件的定位.但当两条挡板座边缘都被遮挡时,本文方法则不再适用,将该类图像设为问题图像,采用人工巡查的方式进行检测,但根据统计,该类图像所占比例极小.
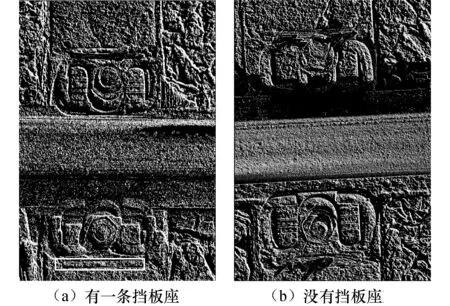
图7 挡板座缺失图像Fig.7 Baffle seat missing images
为了体现本文方法的优越性,将本文方法与现存定位方法进行比较,结果如表1所示.可以看出,文献[4]利用钢轨和轨枕的十字交叉特性,通过直方图均衡化降低光照不均匀的影响,采用区域亮点统计方法定位钢轨和扣件边缘,从而确定扣件区域,方法简单,具有一定准确性,但在光照较强和较暗时准确率较低,且抗干扰能力较差.文献[6]改进十字交叉方法,通过灰度投影提取扣件区域,准确率有所提高,但是在不同光照情况下扣件的定位存在较大误差.文献[9]定位方法虽然在识别率上高于前两种方法,但同样存在对雨天图像定位偏差较大的缺点.而本文方法不论在何种光照情况下定位效果都相对稳定,且准确率较高,更加适用于自然条件下的扣件定位.
表1几种定位准确率对比结果
Tab.1Comparisonresultsoflocationaccuracy%

方法晴天图像雨天图像文献 [4]85.182.5文献[6]90.387.2文献[9]92.287.4本文方法96.595.4
5 结论
1)使用Census变换具有相对灰度不变性的特点来增强图像特征,通过计算最小均匀度子领域像素均值代替中心像素,并引入局部纹理反差值增加像素间的相关性,克服了传统Census变换的局限性;通过基于Mean-shift算法的霍夫直线检测提取挡板座边缘特征,结合扣件大小和扣件的对称关系实现扣件的精确定位.实验结果证明,本文方法在晴天和雨天情况下定位精度分别提高了4.3%和8%以上,能够适应于不同天气条件下的扣件定位.
2)利用挡板座位于扣件下方,更贴近扣件,且挡板座的直线长度和扣件的宽度几乎等同的优势,根据挡板座边缘直线来确定扣件区域,定位出的扣件范围也相对较小,可以减少很多无关区域在扣件图像中的占比,缩小了后续特征提取的计算量.
猜你喜欢
中国动物保健(2022年10期)2022-11-04
科技创新与应用(2022年14期)2022-06-02
中学生天地(A版)(2021年9期)2021-10-25
智能计算机与应用(2020年9期)2020-03-18
小资CHIC!ELEGANCE(2019年40期)2019-12-10
诗潮(2019年1期)2019-01-25
发明与创新·大科技(2017年1期)2017-01-14
水禽世界(2015年6期)2016-03-04
水禽世界(2014年4期)2014-09-21
初中生世界·七年级(2014年2期)2014-03-24
