采用SG平滑滤波的Stewart平台主从控制研究
2019-05-16 01:04:34郭云鹏侯至丞王卫军韩彰秀
自动化仪表 2019年2期
郭云鹏,张 弓,侯至丞,王卫军,2,王 力,韩彰秀,2
(1.广州中国科学院先进技术研究所,广东 广州 511458;2.深圳市中科德睿智能科技有限公司,广东 深圳 518055)
0 引言
机器人的离线路径规划一般适用于已知作业环境。对于未知环境的完全自主在线路径规划,需要引入各类传感器及复杂的控制算法,成本高、难度大。主从式机器人控制方式是在机器人控制中引入主手设备,以机器人作为从手,通过人操控主手间接控制机器人,是未知环境中机器人的主要路径规划方式[1]。美国的达芬奇手术系统(Da Vinci surgical system,DVSS) 外科手术机器人系统[2]、英国的Endo Assist机器人辅助内窥镜操作系统[3]、天津大学主导研制的“妙手”微创外科手术机器人系统[4],以及美国NASA的空间站遥操作人形机器人[5],均采用主从控制,实现手术机器人的操控。当前,主从控制研究的关键在于从手跟随主手运动的平滑度与实时性。
Stewart并联平台具有6个自由度,可以完成复杂的任务指令,广泛应用于运动模拟、装配、检测等领域[6]。SpaceMouse三维鼠标通过内置光学传感器实现6自由度的运动数据采集,便于控制工程模型和虚拟摄像机的空间位置[7]。将SpaceMouse用作Stewart平台主从控制的主手,可以在自由度上形成一一对应,从而增加操控的自然性和舒适性。为此,本文以Stewart并联机器人作为控制对象,以三维鼠标SpaceMouse作为控制主手,实现了两者之间的主从控制,并对其平滑度与实时性进行了试验研究。
1 主从映射模型
根据主手与从手的相对结构,主从操作系统可以分为主从同构型和主从异构型两种结构。主从手结构如图1所示。
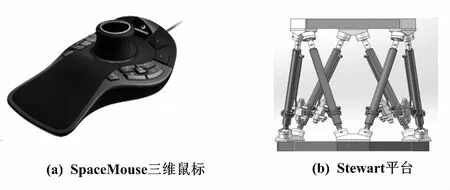
图1 主从手结构示意图
主从手构型的优点是主从映射较为简单,从手末端位姿控制易于实现;缺点是受从手结构的限制,通用性差,难以达到人机工程学要求。主从异构型主手采用完全独立的设计,具有较好的通用性,且能兼具人机工程学的设计要求;缺点是控制模型更为复杂,需要实时求解主从系统的正反运动学甚至动力学[8]。本文主手为市场通用的三维鼠标SpaceMouse,从手为经典Stewart平台,属于异构型主从结构。但由于主手的通用性,其在人机交互上具有易用、可靠的特点。
1.1 主从映射方式
SpaceMouse可以实现6个自由度的运动输出,包括前后、左右方向的侧移和侧倾,上下的拉伸以及周向的扭转。Stewart平台具有前后、左右的平移,升降,俯仰,偏航以及横滚6个自由度。因此,在自由度上,主从手之间具有一一对应的关系。为符合人的自然操作习惯,对主从手间作自由度上的映射,如表1所示。
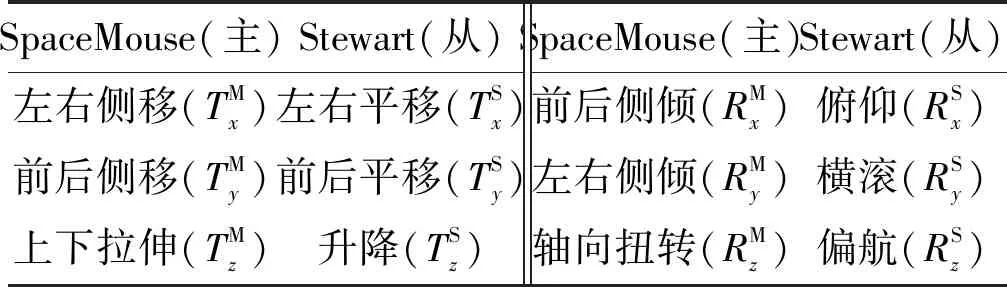
表1 主从手自由度映射
基于主从手间在运动自由度上的一一对应关系,主从运动映射既可以是空间点对点映射,也可以是增量式映射。增量式映射输入的是相对位姿,控制更为简单且误差可控,尤其适用于主手工作空间较小且灵敏度高的情况[9]。


图2 主从运动映射流程图
1.2 运动学反解
从图2可知,为实现从手Stewart跟随主手Space Mouse运动,除了建立主从手间的运动映射关系外,还需计算Stewart平台的运动学反解。
根据并联机构相关理论,建立Stewart平台坐标系[10]如图3所示。图3中,Ai(i=1,2,…,6)为上平台铰点中心,Bi(i=1,2,…,6)为下平台铰点中心。静坐标系O-XYZ与下平台固联,原点O位于下平台中心,OX轴和OY轴都在静平台平面内并且OY垂直于B3B4;动坐标系p-xyz与上平台固联,原点p位于上平台中心,px轴和py轴都在动平台平面内并且py垂直于A3A4。
假设动平台的位姿广义坐标为q=[x,y,z,α,β,γ]。其中:x、y、z为动坐标系原点p在静坐标系中的坐标;α、β、γ为动坐标系相对于静坐标系的∠RPY表示。根据∠RPY及旋转变换理论,可得相应的旋转矩阵:
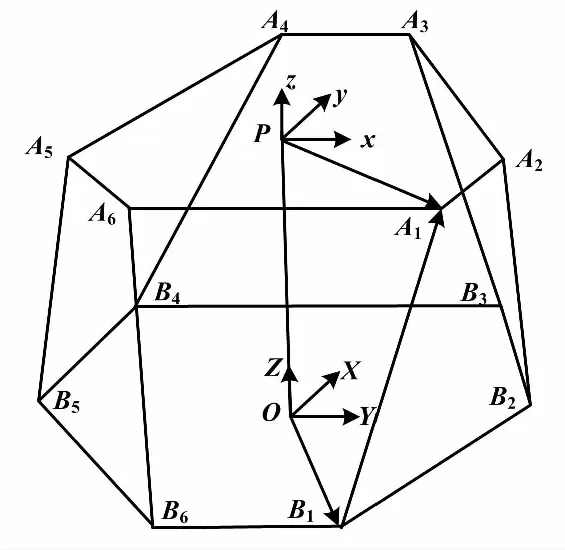
图3 Stewart平台坐标系
R=Rot(z,γ)Rot(y,β)Rot(x,α)=



(1)
由式(1)可得第i根驱动杆的长度为:
(2)
2 运动平滑性分析
通过人工操控主手时,会不可避免地产生一定的抖动。由图2可知,主手端的抖动必然会复现至从手端,从而影响从手的响应,过高频率的抖动甚至会损坏驱动电机。因此,有必要对主手端的输出进行一定的平滑处理[11]。
本文采用Savitzky-Golay(SG)滤波方法,对运动数据进行平滑处理。SG滤波是一种在时域内基于局域多项式最小二乘法拟合的滤波方法。其最大特点是在滤除噪声的同时可以确保信号的形状、宽度不变,因而被广泛运用于图像处理中[12]。
2.1 原理分析
考虑一组以n=0为中心的(2M+1)个数据x[n],利用多项式对其拟合:
(3)
得到最小二乘拟合残差为:

(4)
根据Savitsky和Golay的发现,利用卷积运算可以求取拟合多项式的常数项,即对输入数据进行加权平均:

(5)
由微积分知识可知,若要ε最小,ε对各个参数的偏导数都应为0,即:

(6)
化简得到:
(7)
式中:i=0,1,…,N。
引入一个(2M+1)行、(N+1)列的辅助矩阵A,令:
A={an,i}
(8)
式中:an,i=ni,-M≤n≤M,0≤i≤N。
引入另一个辅助矩阵B,使得:
B=ATgA
(9)
经计算可得:
(10)
于是有:
Ba=ATAa=ATx
(11)
a=(ATA)-1ATx=Hx
(12)
式中:x=[x[-M] …x[M]]T;a=[a[0] …x[N]]T;H为所求卷积系数。
2.2 仿真分析
为验证SG滤波平滑效果,在Matlab中编写程序测试。给定一个长度为1 000的正弦波信号,在该信号的基础上加入服从正态分布的随机噪声,并分别选取多项式拟合的数据长度以及阶数:①长度30,阶数3;②长度30,阶数1;③长度10,阶数3。经过SG平滑处理前后的滤波效果对比可知,SG滤波在平滑数据的基础上,很好地保留了原来信号的形状和宽度。通过对比不同多项式拟合的数据长度和阶数的平滑效果(即数据个数2M+1和阶次k的不同组合)可以发现:阶数越大,越接近原信号形状,平滑效果越差;数据长度越大,平滑效果越明显,对原信号形状的保持越低。该结果符合多项式拟合的一般规律。
3 试验研究
为实现主手对从手的遥操作,本文借助以太网组建控制系统,包括Ethernet和Ethercat通信。Ethernet负责主手与控制器,即上位机与下位机之间的数据传输;Ethercat负责控制器与伺服驱动之间的数据交换。控制器采用德国Beckhoff公司的CX5120,伺服驱动为埃斯顿ProNet系列交流伺服。系统结构如图4所示。

图4 系统结构图
本文组建的试验样机以Beckhoff公司的TwinCat作为下位机程序的开发环境,以Visual Studio MFC结合3DConnexion公司提供的SDK作为上位机开发环境。所设计上位机测试界面分两部分:一部分为SpaceMouse数据显示,包括直接采集数据以及Stewart计算缸长;另一部分为Stewart数据显示,包括实际位姿和实际缸长。
由于本文采用的主从映射为增量式映射,如果不对主手的运动输出量加以限制,必然会造成从手运动超出工作空间。因此,在试验之前必须先确定Stewart平台的工作空间。Stewart平台工作空间由平台结构、电动缸行程、虎克铰转角范围等决定。以这些决定因素为判定条件,通过空间遍历的方法,结合前文提到的运动学反解,即可完成求解。本文求解Stewart平台在6个自由度上的最大运动范围如表2所示。

表2 Stewart平台最大运动范围
主从控制下的驱动缸长度变化如图5所示。
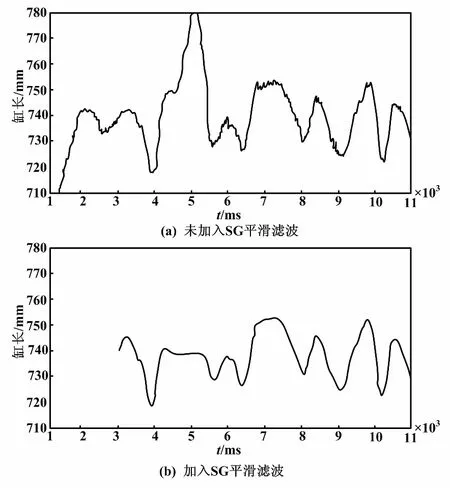
图5 主从控制下的驱动缸长度变化曲线
试验第一阶段,在不加入平滑滤波的情况下远程操控主手,获取从手Stewart平台的计算缸长与实际缸长。选取1号缸为例,从图5(a)可以看出,从手的延时大约为10 ms。但由于没有对主手进行运动平滑,导致从手的跟随运动有很明显的顿挫感。
试验第二阶段,在上位机程序中加入SG平滑滤波。其中,滤波系数设置数据长度为100,阶数为3。操控主手获取Stewart平台计算缸长与实际缸长。仍然以1号缸为例,如图5(b)所示。从手的跟随运动相较于未加滤波时更为平滑,但相应的延时增加到接近40 ms。由此可见,SG具有显著的平滑效果,但同时也增加了滞后。
4 结束语
针对机器人在特殊环境下的特殊作业要求,本文以经典6自由度并联机器人Stewart平台作为研究对象,建立以通用三维鼠标为主手的主从控制系统。分析了主从间的映射模型以及运动平滑,搭建了试验平台。试验表明,本文建立的主从控制,实现了从手跟随主手的平滑运动。由于使用了数字滤波器,从手具有40 ms左右的延时,符合一般机器人作业的实时性要求。
猜你喜欢
大学数学(2021年5期)2021-10-30 09:01:04
华东师范大学学报(自然科学版)(2021年3期)2021-06-03 09:30:10
中学生数理化·七年级数学人教版(2018年4期)2018-06-28 03:26:28
数学大世界(2018年1期)2018-04-12 05:39:03
制造技术与机床(2017年6期)2018-01-19 02:41:22
中等数学(2017年2期)2017-06-01 12:21:50
电测与仪表(2016年24期)2016-04-12 00:21:04
探测与控制学报(2015年4期)2015-12-15 15:00:56
电讯技术(2014年1期)2014-09-28 12:25:26
电气电子教学学报(2014年1期)2014-08-23 03:23:44