冗余升沉补偿液压机械手的运动轨迹控制
2019-05-07 06:55杨可可茹亚东李玉山
中国工程机械学报 2019年2期
杨可可,茹亚东,李玉山
(1.新乡职业技术学院 数控技术系,河南 新乡 453000; 2.山东科技大学 机械与电子工程学院,山东 青岛 266520)
伴随现代科技的发展,液压驱动机械手在企业生产中得到了迅速发展.由于液压机械手具有传动平稳、动作灵敏及结构紧凑等许多优点[1],因此,许多国家都在研究与开发先进机械手.现代机械手的发展涉及机械、控制及计算机等多种学科,尤其是电子计算机技术的发展,进一步推进了机械手的研发工作,提升了设计效率[2].机械手可以替代人类手工劳动,提高生产率,在农业、工业、海洋等领域得到了广泛应用.
当前,许多研究者对液压机械手展开了研究.例如:文献[3-4]研究了液压机械手模糊PID控制方法,建立了液压机械手数学模型,引入模糊理论,在PID控制基础上设计出模糊PID控制流程,通过Matlab软件对控制方法进行仿真,提高了机械手运动轨迹跟踪精度;文献[5-6]研究了液压机械手变增益PI控制方法,创建了水下液压机械手模型简图,对传统PI控制进行改进,设计出变增益PI控制流程并进行仿真,变增益PI控制响应速度快,跟踪精度较高;文献[7-8]研究了机械手液压伺服控制方法,建立了6自由度机械手三维模型,分析了液压缸运动速度和压力,设计了机械手液压伺服控制原理图,对液压末端执行件控制进行了改进,从而满足物体的搬运作业.但是,以往研究的液压机械手受到环境干扰时,其运动轨迹产生的误差较大,不能很好地适应高精度场合的需要.对此,本文建立了冗余液压驱动机械手简图模型,推导机械手液压驱动方程式,采用前馈-反馈复合控制方法,设计了在线调节参数流程图.在海浪波干扰情形下,通过Matlab软件对冗余液压机械手运动轨迹进行误差仿真,并与其他控制方法进行对比分析,为深入研究冗余液压机械手运动误差提供了参考依据.
1 机械手动力学
本文研究的冗余液压机械手是三连杆机构,它由两个转动关节和一个平移关节组成,每个关节由连接到伺服阀的液压缸驱动,如图1所示.
根据图1坐标系,可以推导出机械手末端运动轨迹方程式为
式中:x1p,x2p分别为P点坐标位置;L1为连杆1的长度;L2为连杆2转动点到末端的长度;q1,q2为连杆1、连杆2的角位移;q3为连杆3运动位移.
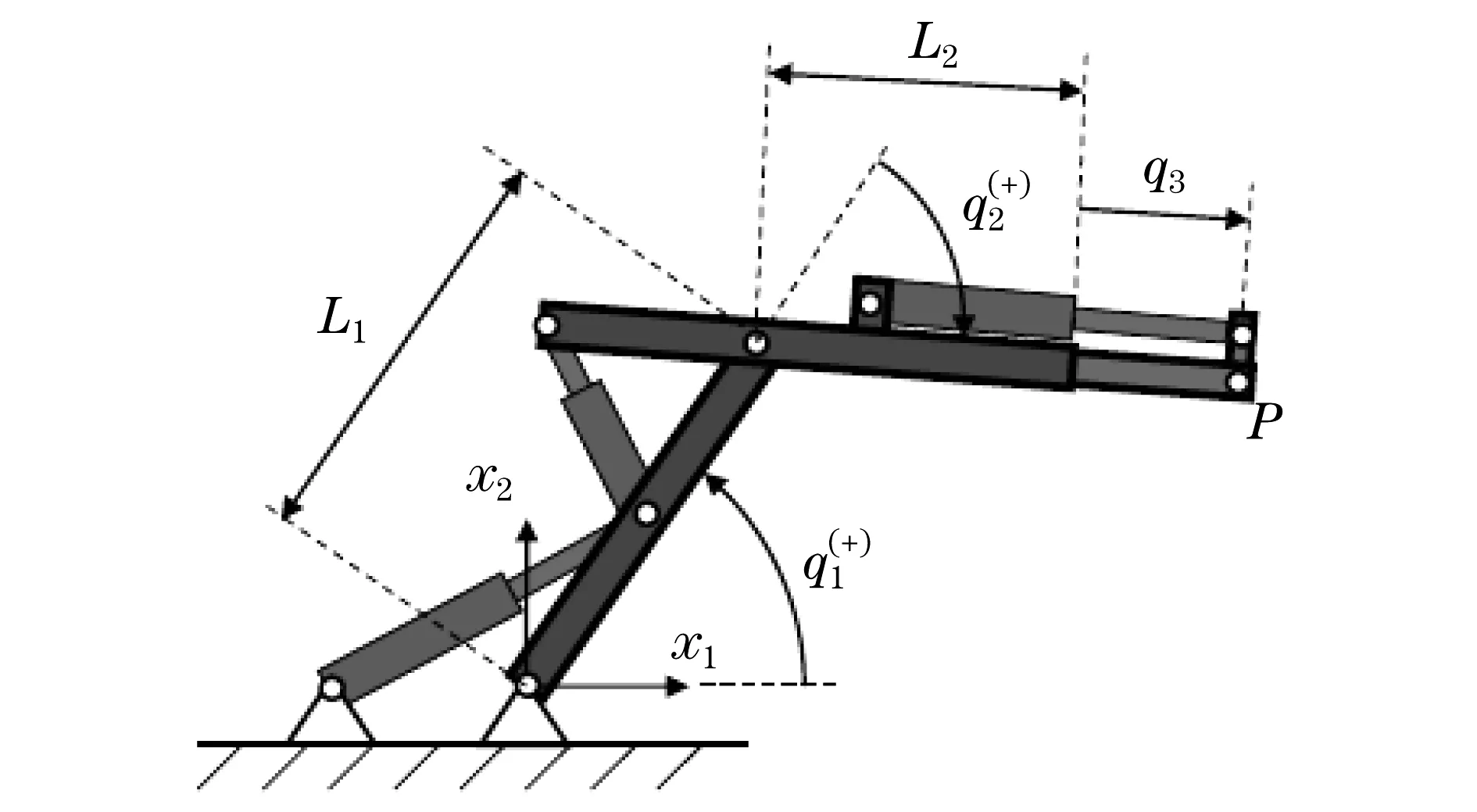
图1 冗余液压机械手驱动结构Fig.1 Driving structure of redundant hydraulicmanipulator
包含n个连杆的冗余机械手运动学及导数关系式[9]为
式中:x∈Rm(n>m)为m个自由度的端点位置坐标;x′为跟踪速度;q∈Rn为关节位置;q′为关节速度;J(q)∈Rm×n为雅可比矩阵,定义为
(5)
运动学给出的雅可比矩阵表达式为
对于不重复的冗余机械手(n=m),结合式(4)、式(5)可以推导出关节角速度与运动轨迹速度之间的关系式为
(6)
对于冗余机械手,雅可比矩阵是非平方的,也是不可逆的.因此,雅可比矩阵的伪逆矩阵为
(7)
式(7)定义了伪逆雅可比矩阵,它可以代替式(6)中的J-1,从而得到冗余机械手的关节角速度和末端运动轨迹速度之间的关系式为
(8)
矩阵W∈Rn×n是一个正对角矩阵,包含每个关节速度的加权为
(9)
本文采取以下权重:
(10)

通过加权伪逆雅可比矩阵,可以推导如下方程式:
(11)

(12)
为了避免液压机械手运动关节产生饱和状态,成本函数采用的目标函数为
(13)

2 机械手控制器
2.1 制动器
液压缸速度与关节角速度的关系式[10]为
(15)
式中:v为液压缸运动的速度;C(q)的矩阵式为
(16)
式中:γ1,γ2为q1和q2的函数.
液压缸的稳态控制方程式[11]为
(19)
式中:i=1,2,3为电路指数;QN,i为参考体积流量;Qi为体积流量;Ai为活塞面积;ΔpN,i为参考流量压力差;Δpi为压力差;ui为阀芯位移控制变量.
根据上面方程,如果已知压降,可以从液压缸速度计算出一个阀芯位移,即
(20)
阀芯位移方程式可简化为
(21)
式中:D(p)为前馈项.
2.2 控制器结构
冗余机械手的运动控制是基于伪逆雅可比矩阵和零空间矢量.控制器生成一个参考速度,如图2所示.每个关节都有一个制动的控制器,它用关节参考速度来产生电流信号到伺服阀.控制器是基于一个前馈的模型,采用式(21)和比例积分增益修正前馈模型产生的误差.
在图2中,D(p)为前馈项,PI为比例积分控制器,C(q)为反馈项.

图2 执行机构控制器结构Fig.2 Actuator controller structure


图3 机械手控制结构Fig.3 Manipulator control structure
3 仿真与分析
为了验证控制方法效果,液压驱动机械手运动轨迹在受到海面波浪干扰情形进行仿真.干扰轨迹方程式为
(23)


图4 连杆1角位移误差Fig.4 Angular displacement error of the firstconnecting rod
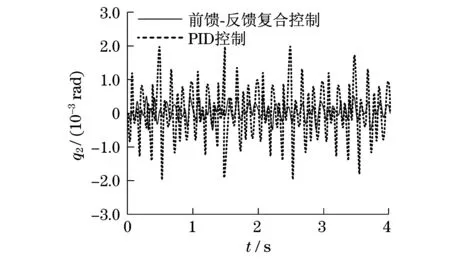
图5 连杆2角位移误差Fig.5 Angular displacement error of the secondconnecting rod

图6 连杆3位移误差Fig.6 Third link displacement error
根据图4~图6可知:采用PID控制方法,冗余液压机械手连杆1、连杆2、连杆3运动轨迹跟踪产生的最大误差分别为1.68×10-3rad,1.99×10-3rad,3.72×10-4m,误差跳动幅度较大;采用前馈-反馈复合控制方法,冗余液压机械手连杆1、连杆2、连杆3运动轨迹跟踪产生的最大误差分别为0.39×10-3rad,0.51×10-3rad,0.55×10-4m,误差跳动幅度较小.综合比较可知,采用前馈-反馈复合控制方法,能够对外界环境干扰产生的误差进行在线补偿,运动定位精度较高.
4 结语
针对3自由度冗余液压驱动机械手,设计了前馈-反馈复合控制方法.主要结论如下:
(1) 设计了冗余液压驱动机械手,采用梯度投影方法解决零空间冗余优化标量成本函数,避免液压机械手运动关节产生饱和状态.
(2) 采用前馈-反馈复合控制方法,可以在线调节控制参数,抑制冗余液压机械手受到外界波的干扰,提高末端执行器定位精度.
(3) 采用Matlab软件对冗余液压机械进行仿真,可以提高设计效率,避免机械手设计得不合理,从而造成资源的浪费.
猜你喜欢
石油矿场机械(2022年3期)2022-06-17
鞍钢技术(2022年3期)2022-06-12
哈尔滨轴承(2020年3期)2021-01-26
装备制造技术(2020年2期)2020-12-14
电子制作(2019年13期)2020-01-14
制造技术与机床(2019年8期)2019-09-03
环球时报(2019-07-18)2019-07-18
中国设备工程(2019年22期)2019-01-16
汽车实用技术(2017年16期)2017-09-21
专用汽车(2014年1期)2014-12-10