仿生物体摩擦学发展现状及应用前景
2019-05-07 06:55:24刘晓敏赵登超罗林辉
中国工程机械学报 2019年2期
刘晓敏,赵登超,陈 亮,罗林辉
(福州大学 机械工程及自动化学院,福州 350116)
现代摩擦学是以研究摩擦学机理、理论及工程应用为主的一门新兴学科[1].据统计,我国每年因摩擦问题造成资源损失高达千亿元[2].为此,提高设备摩擦学性能,降低设备能源消耗,对实现国民经济可持续发展具有重要的现实意义.
生物体捕食、奔跑、飞行等行为都离不开摩擦.为适应生存环境,生物体经过亿万年的生存竞争,进化出优异结构、组织及运动方式,能很好地适应不同的摩擦环境.例如:旗鱼通过收起背鳍以减少在水中的阻力,长剑般的吻突可快速拨开水流,完美流线的形体,使其成为动物界的游泳冠军[3];鲨鱼凭借其皮肤表面的特殊纹理结构,能有效降低水中游动的阻力,大大提高其在水中的游速[4];壁虎脚掌凭借其“强黏附”和“易脱黏”特性,使其在光滑玻璃上运动自如[5];贝类长期生活在沙、泥混合的复杂环境中,进化出优异的耐磨结构,其耐磨性几乎可与类金刚石涂层相媲美[6].因此,深入了解这些生物体优异摩擦学性能的结构、材料、性状、原理、行为等,将其运用到工程仿生中,可以为摩擦学设计提供新的设计思想、工作原理及创新方法.
本文利用一些典型的仿生物体摩擦设计案例,对其存在的黏附、耐磨、润滑减阻、增摩等4个方面进行工程仿生研究,为摩擦学仿生创新研究提供参考;同时,探讨与分析了仿生摩擦学现阶段面临的主要问题,以便对今后相关研究工作进行展望.
1 仿生物体摩擦学特性
1.1 黏附性
黏附性是指两接触表面垂直分离时产生的阻力.不同生物体的黏附作用机理有所差别,例如甲壳虫、苍蝇、蜘蛛、壁虎等生物体脚掌上有大量刚毛与物体表面形成微接触区,使其具有较强的黏附性能.图1(a)为4类生物脚掌刚毛微结构扫描电子显微镜(Scanning Electron Microscopy,SEM)[7]图像.树蛙对光滑物体表面产生很强的黏附力是利用毛细现象.树蛙脚垫末端含有大量的平底六角形上皮细胞,见图1(b)[8],通过密集填充和角蛋白纤维的定向交叉,形成纳米阵列复合结构.平底六角形上皮细胞被充液槽隔离,根据树蛙脚垫与表面间的分离状况,充液槽自动调节宽度以便将液体挤出或吸入,达到增大或减小黏附力的作用.
章鱼对水下物体的强黏附力是利用压力差原理.在章鱼触角吸盘内,存在直径从300 μm到几厘米大小不等的腔室.吸盘的解剖结构包括一个开口和一个球形凸起,见图1(c)[9].当章鱼吸盘附着在水下物体表面时,肌肉的静水机制会使吸盘形成密闭空间结构,水被吸入髋臼,在腔内形成水环.随着经络肌的收缩,孔口上侧与髋臼中的球形凸起接触,使腔内压力可降至-0.168 MPa.这种与外界环境形成的压力差使章鱼在水中获得强黏附力.
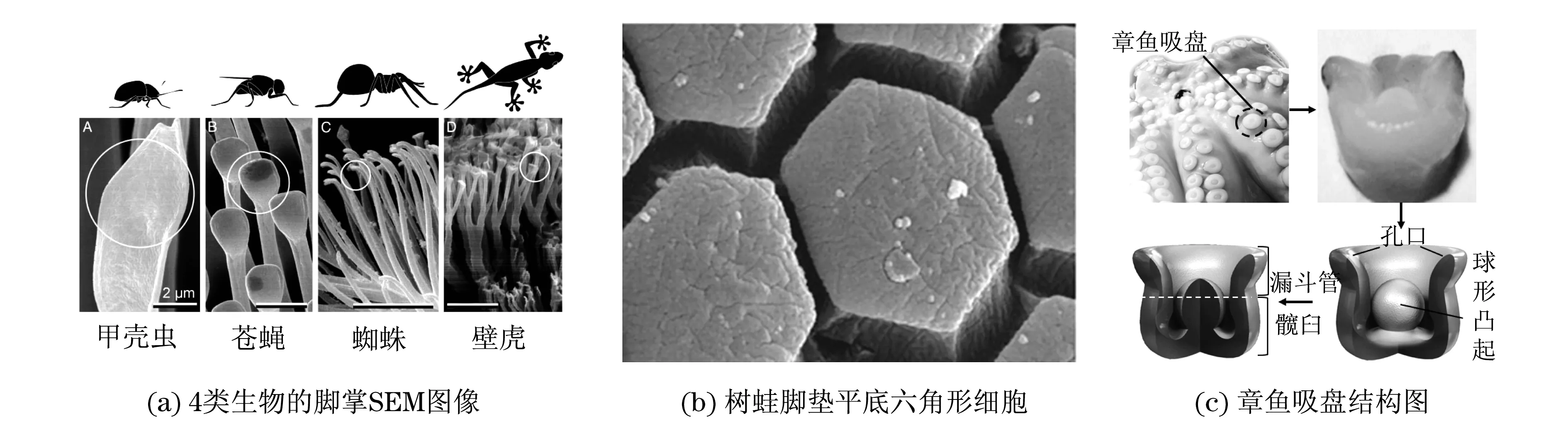
图1 不同生物的黏附结构图Fig.1 Adhesion structure diagram of different organisms
1.2 耐磨性
蝼蛄背部和侧面覆盖有100~200 μm的长刚毛和50~100 μm的短刚毛,在角质层表面有许多刺状微凸体结构.刚毛与刺层叠加,形成多层表面形态.这种多层表面形态可有效减缓蝼蛄挖掘土壤时土壤颗粒对其体表的磨损.刚毛还能够防止土壤颗粒对蝼蛄体表的黏附.图2为蝼蛄背部SEM图像[10].
另一种具有高耐磨性的生物为砂鱼蜥,如图3所示[11].砂鱼蜥能够快速在沙中穿梭,充分展现砂鱼蜥表皮的高耐磨性及运动过程的低摩擦性.砂鱼蜥表皮鳞片胶蛋白糖基化,结缔组织(较软)和角质层(较硬)组成非均质结构及鳞片间的沟槽结构是其耐磨的主要原因.其正弦波式的运动使体表周围沙体呈黏流体,降低了在沙中运动时的摩擦力.

图2 蝼蛄背部表面SEM图像Fig.2 SEM image of mole cricket back surface
竹子是一种天然的高机械强度和优良耐磨性的功能梯度材料.竹原纤维是竹材主要组成成分.竹原纤维按一定的取向,以同心圆的形式交替组成.宽层纤维相对于中心轴取向角在3°~10°,薄层取向角在30°~90°,大多数在30°~45°范围内取值,这是竹子具有高耐磨性及优良机械强度的主要原因.竹子耐磨损性能还与竹原纤维的密度、相对滑动速度、摩擦方向有关.竹子表层的竹纤维密度最大,其耐磨性能最高.

图3 砂鱼蜥体表鳞片结构图Fig.3 Structure diagram of sandfish scaly
1.3 润滑减阻
润滑是改善摩擦副的摩擦状态、降低摩擦阻力、减缓磨损、提高机器运行效率、降低能源消耗的一种技术措施.许多鱼类通过润滑来减小水中的摩擦阻力,降低运动时的能量消耗,实现快速运动.
大多数鱼的上皮组织分布有大量的杯状细胞,杯状细胞分泌的黏液含有水溶性大分子,可使鱼体周围的水从层流向紊流转变受到明显抑制,从而有效减小鱼在水中的阻力.鲨鱼表皮的定向楔槽状鳞片具有优异的减阻性能,这种特殊的鳞片结构被认为能有效减小身体周围水体回流引起的湍流强度,达到降低水中阻力的目的.图4为鲨鱼体表皮不同位置的SEM图像[12].

图4 鲨鱼体表皮不同位置的SEM图像Fig.4 SEM images of the shark different locations skin
许多植物体、细菌分泌的黏液具有超润滑性能.莼菜黏液与玻璃表面的摩擦系数可降至0.005,形成一种超润滑状态.这种黏液的超润滑机理如图5[13]所示,黏液中的多糖分子构成纳米片状结构,在片状结构间充满水分子形成水化层,从而获得超润滑性能.芦荟叶中含有丰富的黏液.Xu等[14]研究认为,在室温下的粘度约为5.8 mp·s,此时的芦荟黏液能够作为绿色环保型的润滑液进行使用.

图5 莼菜黏液超润滑机理示意图Fig.5 Schematic of super lubrication principle ofbrazened schreiber mucilage
1.4 增摩
在某些情况下,人们希望增大物体间相对运动的摩擦力,以避免因摩擦力小造成严重危害.自然界很多生物体以其特殊的运动方式和身体构造,使其能够随环境的改变来调整摩擦力的大小.
蛇类腹部鳞片呈覆瓦状排列,使蛇类爬行时呈现各向异性的摩擦学特性.当蛇在倾斜表面向上爬行时,蛇将腹部鳞片相对于腹面倾斜,使其与粗糙表面上的凹凸体相连锁,增加向上爬行过程中的摩擦力.同时,摩擦力大小随凹凸体表面相对于腹面倾斜角度的增加而增大,这一结构是蛇类攀爬时获得足够前推动力的关键.图6为蛇爬行过程及其腹部SEM示意[15].
此外,雷可夫和约翰逊将过去的一切哲学观统称为客观主义。哈泽尔(Haser)认为这种“客观主义”只是他们为论证自己的观点而杜撰的“假想敌”,实际上并不存在,因为他们的论述缺乏准确的引用信息,极少列举具体的参考文献或指出持该观点的学者姓名。同时,雷可夫和约翰逊还多次扭曲和误解了所谓的“客观主义者”的观点,对西方哲学思想也存在着诸多混淆和模糊的理解。哈泽尔还指出,雷可夫和约翰逊一方面把某些学者的观点归入客观主义的范畴,一方面又多次引用这些学者的观点来支持自己的论证,这显然犯了论证自相矛盾的错误。[12]

图6 蛇爬行过程及其腹部SEM图像Fig.6 SEM image of snake abdominal and itscrawling process
猫科类动物能够在全速奔跑时急转弯,通过无声运动捕捉猎物,这需要脚掌和地面间具有较大的摩擦力、低冲击力.这是由于猫科类动物脚底部长有又厚又软的肉垫,弹性十足,且脚趾末端的钩爪能够伸缩自如.当它们走路时,就会把钩爪缩进肉垫里,从而减少爪与地面的硬性接触,减缓脚掌落地时的震动,使其走路悄无声息.另外,脚趾垫上独特的纵向突起,配合钩爪的伸缩,使其能够在全速状态下获得足够大的摩擦阻力,进行急转弯.
2 仿生物体摩擦学应用发展现状
仿生物体摩擦学特性在工程仿生方面有着重要的应用.Baik等[9]仿章鱼对水下物体的吸附原理,在微米级孔的硅模具上填充聚氨酯丙烯酸酯基聚合物(s-pUA),制造出耐水性强的黏合贴片,如图7所示,该贴片在干、湿环境中都具有很好的黏合效果.Yang等[16]仿荷叶的超疏水结构,以亲水性光固化树脂为基材,采用浸没式表面堆积三维印刷技术,制备出具有超疏水性能的微尺度人造毛,如图8(a)所示,并将其应用在打蛋器头部,获得了能够有效避免黏附蛋白质的自清洁效果.Zhai等[17]仿荷叶的双层表面结构,采用逐层处理技术组装SiO2纳米颗粒,形成表面覆盖有SiO2纳米颗粒的蜂窝状聚电解质多层膜结构,并利用氟硅烷包覆这种高织构的多层表面,获得了在水下能够较长时间保持疏水性能的多层膜涂层材料,见图8(b).

图7 仿生黏合贴片Fig.7 Biomimetic adhesive patch
Liang等[18]受沙漠蜥蜴皮肤耐磨性结构启发,利用热爆反应技术开发出质量分数为30%的Ni-Ti-C软相与硬相结合的复合材料,获得比纯碳钢高46.5%的耐磨性,如图9(a)所示.Huang等[19]仿沙漠蜥蜴体表结构,研发出上硬(1060铝合金板)下软(硫化硅橡胶)的仿生联轴器材料,如图9(b)所示.经过喷砂实验测试,其抗侵蚀能力比普通样品提高10%.
Asbeck等[20]通过深入研究壁虎脚掌对光滑表面的干性黏着可逆的工作机理,在分析前人提出的粗糙表面攀爬解决方案后,提出使用沉积技术制造分层黏合结构,开发出在光滑垂直表面具有较好爬升能力的仿生壁虎机器人,如图10(a)所示.Maladen等[21]仿砂鱼蜥运动方式,设计出由6个标

图8 仿生疏水材料Fig.8 Biomimetic hydrophobic material

图9 仿生耐磨复合材料Fig.9 Biomimetic composite material
准模块和1个头部模块组成的水下机器人,如图10(b)所示.每个模块允许在平面上进行角度偏移,模块与模块间通过相同的连杆连接.每个模块包含一个伺服电机,通过连接器与相邻电机连接.电源和信号控制线连接到每个电机上,确保设备能够在整个长度上运行,并在机器尾部释放应变.该机器人通过开环控制器驱动改变每个模块的位置轨迹,产生沿着装置向后传播的正弦波,从而在复杂的流体中运动.

图10 仿生机器人Fig.10 Biomimetic robot
其他一些仿生摩擦学案例,如表1所示.
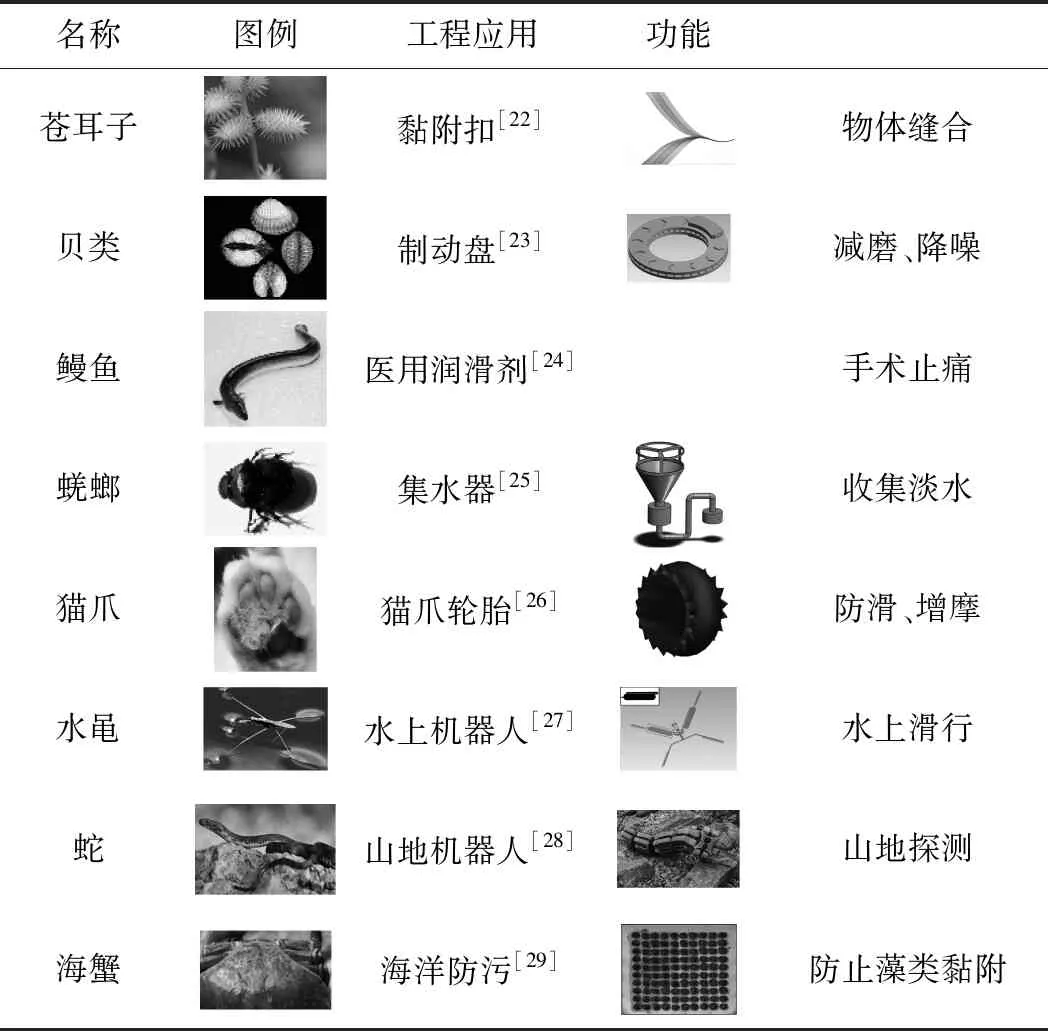
表1 部分生物仿生应用Tab.1 Partial organism’s bionic application
3 仿生物体摩擦学存在问题及应用前景展望
3.1 主要存在问题分析
仿生物体摩擦学能够在一定程度上改善设备的性能.但由于其缺乏系统性的理论支持,也缺乏有效地从生物摩擦学特性向工程领域转移的平台.工程师们对仿生物体摩擦学的工程应用研究仍处于个案研究阶段,且仿生效果不尽理想.
目前,仿生物体摩擦学仍有许多理论和技术性问题需要深入研究,主要概括为以下方面:
(1) 大量生物所具有的摩擦学特性缺乏关键科学理论的解释.根据生物体具有优异摩擦学功能,从物理、化学、数学等多学科角度进行深入全面的研究,从生物体结构及其分布规律、所处环境及其运动方式等角度揭示其所具有摩擦学特性的原因,并从数学的角度推导出其相应的定理,为建立仿生相似性规则提供技术支持.
(2) 生物摩擦学仿生原型的获取缺乏客观的选择方式和有效的评估标准,具有随机性.结合工程仿生设计实际需求,对生物生存环境、结构形式、运动方式、尺度等进行严格定义,规定限制因素,提出一套严格的选取标准,指导选择合适的生物原型,可以有效减轻因仿生的盲目性所造成的研发成本过高的问题,也有助于节省仿生研发时间,加快产品研发周期.
(3) 目前,生物分类方式是生物学家根据形态学划分生物种类,这主要是侧重于物种多样性的研究.该分类方式不利于工程设计人员发掘自然界中生物体存在的优异摩擦学性能,不利于工程仿生工作的开展.为此,针对工程需求,需对生物系统进行科学分类.
(4) 生物优异的摩擦学运动特性及拓扑结构并非可以直接复制.大多数情况下,将生物系统直接复制到工程系统几乎是不可行的,要根据工程实际情况进行适当调整.目前,仿生物体摩擦学在工程领域的仿生仍较为盲目.为此,开发并完善生物体优异摩擦性能的数据库,建立一套生物系统向工程领域转化的系统性理论,对仿生物体摩擦学设计实现数字化、智能化和高效化具有重要意义.
(5) 仿生物体摩擦学领域缺乏具有跨学科知识的研究人员,培养一支兼具工程学、生物学、化学等多学科交叉融合的人才队伍,有助于加快我国仿生物体摩擦学在工程仿生领域的创新发展.
3.2 仿生物体摩擦学应用前景展望
(1) 农业机械.农业机械大多在高摩擦环境下工作,耗能巨大.改善农业机械的工作阻力,降低磨损,对实现农业机械的高效和节能,缓解全球能源和环境压力具有重要意义.蜣螂、蝼蛄、穿山甲、蚯蚓等具有优秀的减黏、降阻、耐磨性能,这对开发高效、节能的新型农业机械具有很大的启发作用.因此,通过仿生设计,提高农业机械的耕作效率,降低农业机械的耗能是未来仿生物体摩擦学的重要发展方向之一.
(2) 环保型润滑油.润滑油的润滑性能对减轻机器磨损、降低机械能源消耗起着重要的作用.随着全球能源的短缺,机械工业对润滑油的润滑性能要求不断提高.人们普遍认为,目前工业中所使用的润滑油对自然、环境和人类不够友好,需要寻找绿色、高性能、可替代目前使用的新型润滑油.自然界中部分生物分泌的黏液具有超润滑性能,开发提取出有效润滑成分的工艺路线,需要重点研究.
(3) 航行器.减小航行器所受的流体阻力,最大限度降低航行器的能源消耗,提升航行速度是人们不懈的追求.生物所具有的流体减阻体表结构、形态及运动方式对航行器的减阻设计具有重要的参考价值.未来,从生物形态、结构、运动方式等方面进行仿生,应用于船舶、潜艇、飞机的减阻仍有很广阔的发展及研究空间.
(4) 特种机器人.研制更多的能够适应特定自然环境的机器人是未来的发展方向之一.如通过模仿水黾所具有的水上负重能力和快速推进能力,研发水上航行机器人,有利于海上救援和执法.模仿蛇类优秀的山地爬行能力,研发出能够在山地、起伏不平的道路上爬行的机器人,以及模仿砂鱼蜥在沙漠中的快速行进能力,研发能够在沙漠中快速行进的机器人,对工业、军事、生态学等方面的科研意义重大.
此外,仿生物体摩擦学在石油、化工、海洋船舶、电子、军工等领域有着广阔的发展及应用前景.
4 结论
(1) 仿生物体摩擦学在黏附、耐磨、润滑减阻、增摩等方面所提供的解决方案对人类工程仿生产品设计具有重要的参考价值.
(2) 仿生物体摩擦学理论的建立使得摩擦学与生物学紧密结合.研究生物体优异摩擦学特性背后的机理,能够极大地丰富摩擦学、数学、物理、化学、材料等多学科理论、方法和技术,进而推动现代摩擦学的发展.
(3) 开发仿生物摩擦特性研究的数据库,建立一套由生物系统向工程领域转化的系统性理论,为实现工程仿生产品的跨越式发展提供技术支持.
未来,仿生物体摩擦学朝着产品数字化、智能化、高效化等方向发展,这将有助于减轻工程仿生设计难度,加快工程仿生产品研发进度,为工业节能、减排,实现国家经济可持续发展作出重大贡献.
猜你喜欢
——纪念摩擦学创始人乔斯特博士诞生100周年
润滑与密封(2021年3期)2021-02-28 19:51:44
润滑与密封(2020年9期)2020-12-10 04:04:49
小学阅读指南·低年级版(2020年11期)2020-11-16 07:00:53
科学(2020年1期)2020-08-24 08:07:58
当代水产(2019年7期)2019-09-03 01:02:24
表面工程与再制造(2019年6期)2019-08-24 06:40:24
新青年(2015年2期)2015-05-26 00:08:47
意林(2014年17期)2014-09-23 17:02:14
遗传(2014年3期)2014-02-28 20:59:04
河南科技(2014年23期)2014-02-27 14:18:52