高速转弯时CVT速比快速变化对车辆动力学的影响
2019-03-19 04:40:20杨新桦
重庆理工大学学报(自然科学) 2019年2期
杨新桦,杨 靖
(重庆理工大学 a.汽车零部件先进制造技术教育部重点实验室; b.车辆工程学院, 重庆 400054)
金属带式无级变速器(CVT)由于速比连续变化的特性,使其在汽车传动系统中能做到根据工况选择最佳的速比,从而获得更好的性能[1-2]。传统的液压电子控制的CVT,由于液压系统中油泵流量的限值以及夹紧力的要求,导致CVT的速比不可能作快速的改变[3-4],因此由于速比变化导致的传动系统的动力学变化并不突出,在研究速比控制策略时,无须考虑它的影响。近几年纯机械电子控制的CVT的出现改变了这种情况。机电控制的CVT通过电机控制锥盘的移动控制速比的变化,当电机以最大电流工作高速运动时,锥盘移动速度也很快,导致CVT速比变化非常大。快速的速比变化率会导致CVT输出的变化,从而改变传动系统输出特性,使得车辆改变加速度。文献[5]通过理论建模与仿真研究了CVT速比变化导致车辆加减速的情况,证明剧烈的速比变化会导致车辆加速度的改变。利用这种变速特性,当车辆高速进入弯道时可以强制车辆减速,进而在一定程度上获得主动安全控制的效果。目前笔者尚未找到对车辆转弯时CVT速比控制相关的有文献报道。
为了进一步研究这种控制效果,本文针对CVT速比变化率对车辆动力学的影响,通过多自由度整车模型与CVT传动系统的耦合模型,模拟了车辆在高速转弯过程中CVT速比变化对车辆动力学的影响,为进一步研究装备机电控制的CVT的车辆高速过弯时速比变化率的控制策略提供参考。
1 多自由度整车模型
1.1 受力分析与运动方程
由于本研究关注车辆在弯道中的运动,因此需要考虑以下自由度:包括车辆质心的平移运动、横摆、侧倾、俯仰运动和4个车轮的旋转运动。模型基本假设如下:风阻只考虑纵向,其他方向的空气阻力忽略不计;前后轮轮距相等;路面水平无波动。
符号说明:a、b为质心到前后轴的距离;l为轴距;d为轮距;δ为转向轮转角;β为车体的横摆角;φ为车体的侧倾角;hrg为侧倾中心离地高度;hr为质心的侧倾半径;m为车辆质量;g为重力加速度;μ为路面摩擦因数;ρ为空气密度;F代表力;V代表速度;K代表刚度;C代表阻尼;I代表转动惯量。
下标说明:x、y、z代表笛卡尔坐标系的3个方向;s代表悬架;wind代表风阻;写在前面的f和r代表前、后;写在后面的l、r代表左、右;i代表4个车轮其中之一;α代表车轮侧偏角;b代表制动;d代表驱动;w代表轮胎。
车辆纵向和横向受力分析如图1所示,纵向、横向与横摆运动方程如下:
[(Fxfr-Fxfl)cosδ+(Fyfl-Fyfr)sinδ+Fxrr-
(1)
(Fyfr+Fyfl)cosδ+Fxrl+Fxrr
(2)
(Fyfr+Fyfl)sinδ+Fxrl+Fxrr-
(3)
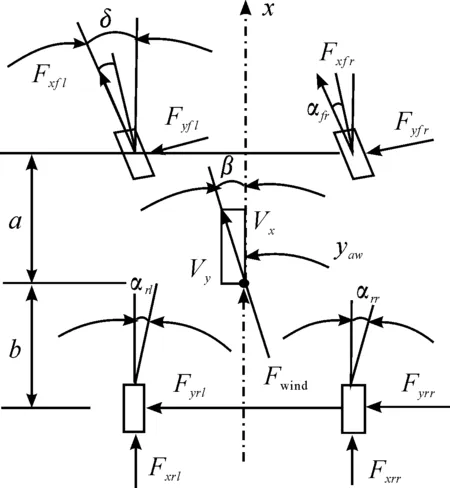
图1 车辆纵向与横向运动受力分析
车辆垂直和侧倾运动分析如图2所示,垂直和侧倾运动方程如下:
(4)
(5)

图2 车辆垂直和侧倾运动受力分析
由于车辆俯仰运动也会导致前后载荷的分配和重心的移动以及影响垂直运动,因此对车辆的俯仰运动分析如图3所示。俯仰运动方程如下:
(6)
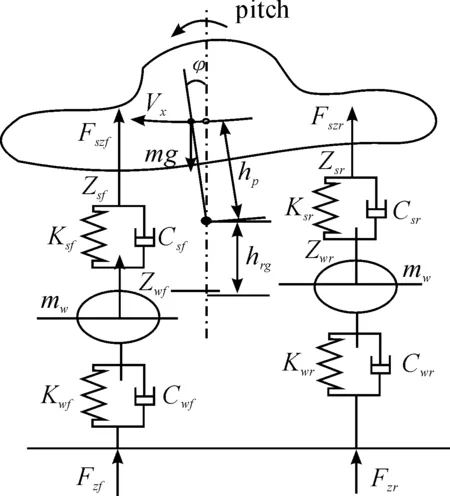
图3 车辆俯仰运动分析
1.2 轮胎模型
按照魔术轮胎公式建立轮胎纵向力和横向力模型[6]。这里不考虑路面不平度的影响以及轮胎垂直运动的影响,轮胎运动只考虑旋转运动,得到轮胎的运动方程:
(7)
轮胎的侧偏角方程如下:
(8)
2 装备CVT的动力传动系统模型
发动机模型采用经典的数表模型[7]。为了模拟发动机响应,并平滑发动机扭矩输出,增加了带时间滞后的低通滤波器。
CVT传动系统模型运动方程如下:
K1·ig(θ1-igθ2)+K2(θ2-i0θ1)=ig·Te-Tf
(9)
式中:θ为转角;C为阻尼;K为刚度;下标1、2分别代表主动轴和从动轴;e代表发动机;g代表变速器;f代表阻力。方程的物理模型和推导过程见文献[5]。
3 仿真分析
3.1 仿真环境与条件
仿真模型使用Matlab/Simulink搭建。模型基本参数参照某小型轿车,如表1所示。
设置驾驶员在1 s时转动方向盘到一定角度,4 s时稳定方向盘保持转向,转向轮的转角变化见图4。发动机油门保持50%开度不变,以模拟驾驶员不减速过弯道的情况。CVT速比的变化设置了3种工况,分别对应图5中编号为1、2、3的3条线。工况1(虚线)代表保持最小速比(0.407 3)不变的稳定转弯工况;工况2(实线)代表快速增大速比到最大传动比(2.464 8),然后保持最大传动比不变的工况;工况3(双划线)代表快速增大速比到最大传动比后,又快速降低速比恢复到最小传动比的工况。对这3种速比控制工况进行仿真,得到车辆不同的响应。仿真结果见图6~9。图6、7分别是车辆侧向加速度和速度曲线。图8是纵向速度曲线。图9是车辆运行轨迹线。
表1 仿真参数表题
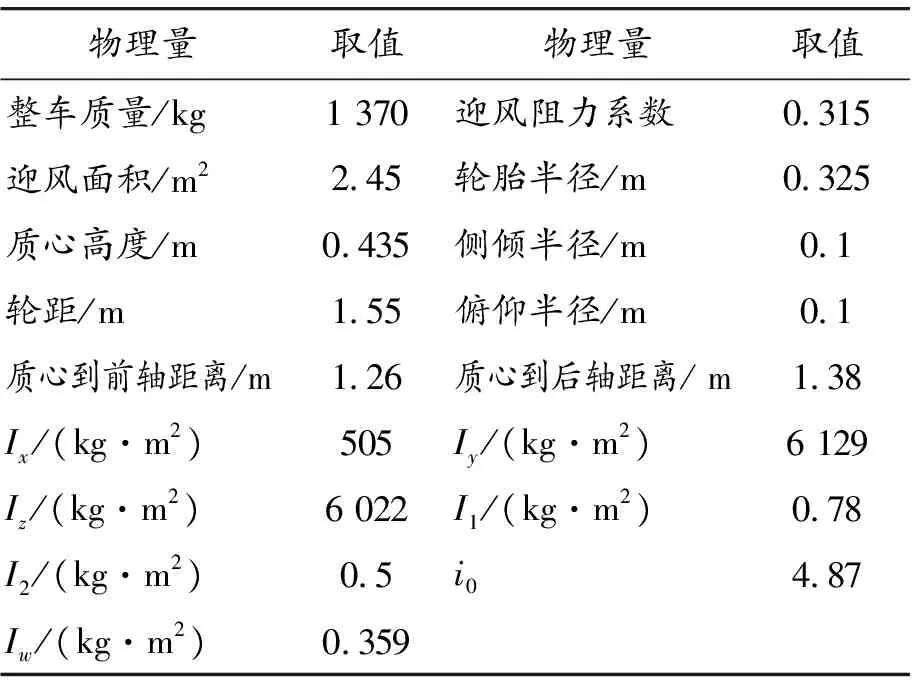
物理量取值物理量取值整车质量/kg1 370迎风阻力系数0.315迎风面积/m22.45轮胎半径/m0.325质心高度/m0.435侧倾半径/m0.1轮距/m1.55 俯仰半径/m0.1质心到前轴距离/m1.26质心到后轴距离/ m1.38Ix/(kg·m2)505Iy/(kg·m2)6 129Iz/(kg·m2)6 022I1/(kg·m2)0.78I2/(kg·m2)0.5i04.87Iw/(kg·m2)0.359
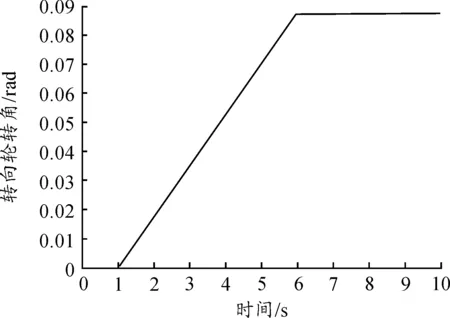
图4 转向轮转角
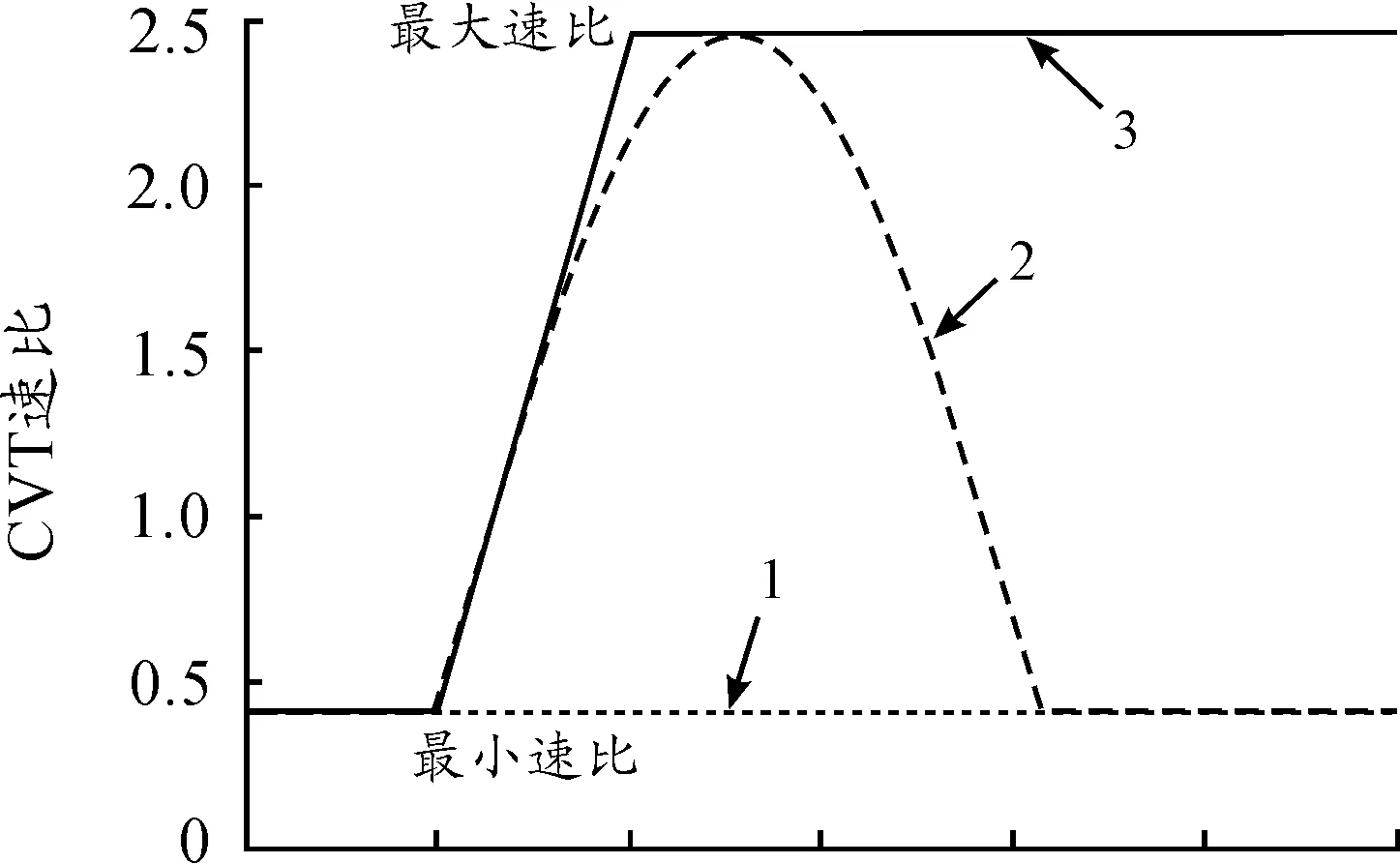
图5 3种CVT速比控制仿真方案
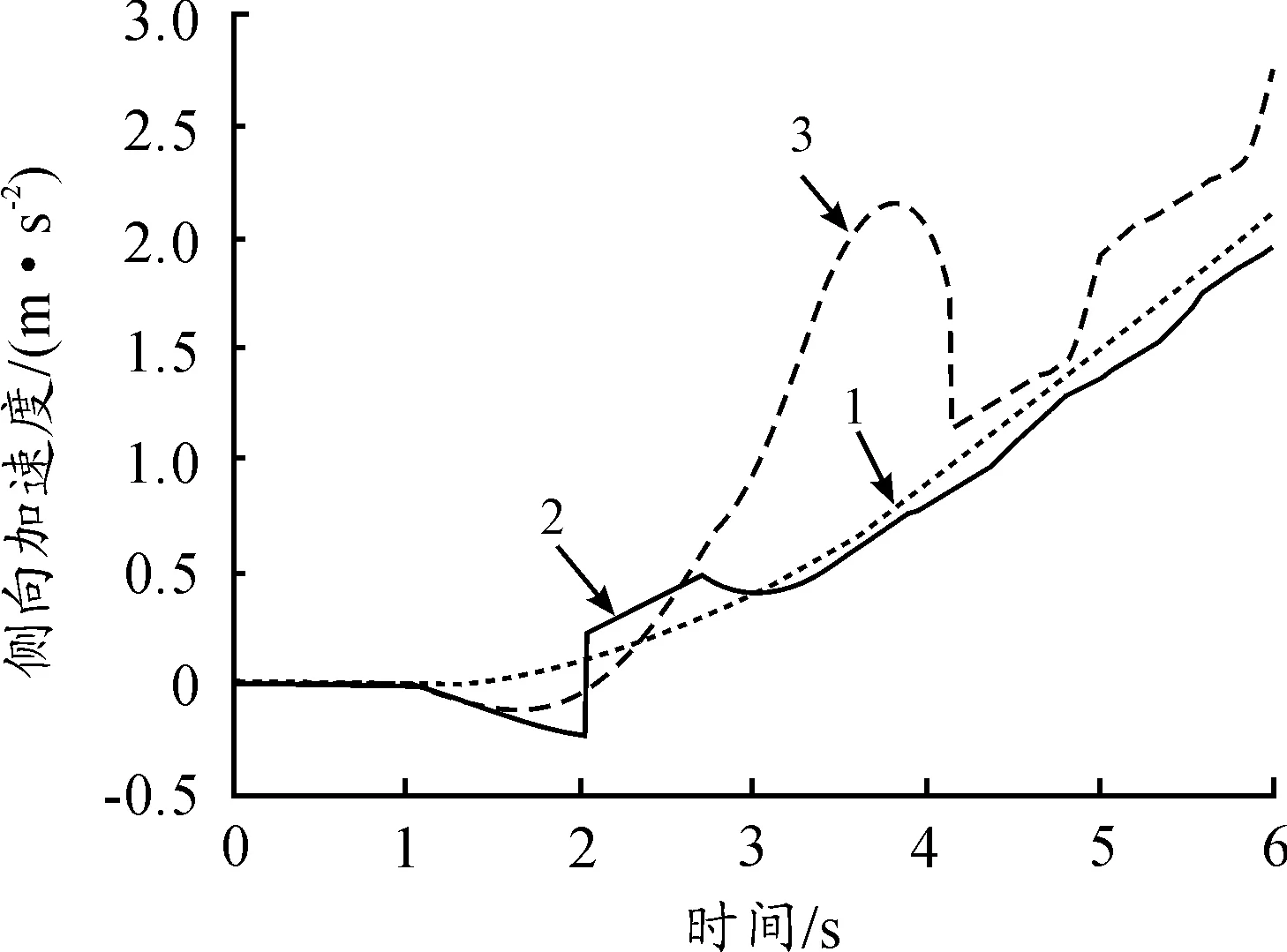
图6 侧向加速度仿真结果
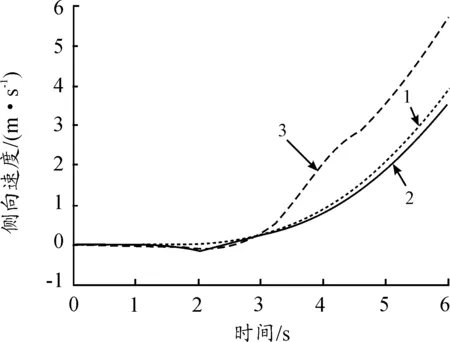
图7 侧向速度仿真结果

图8 纵向速度仿真结果
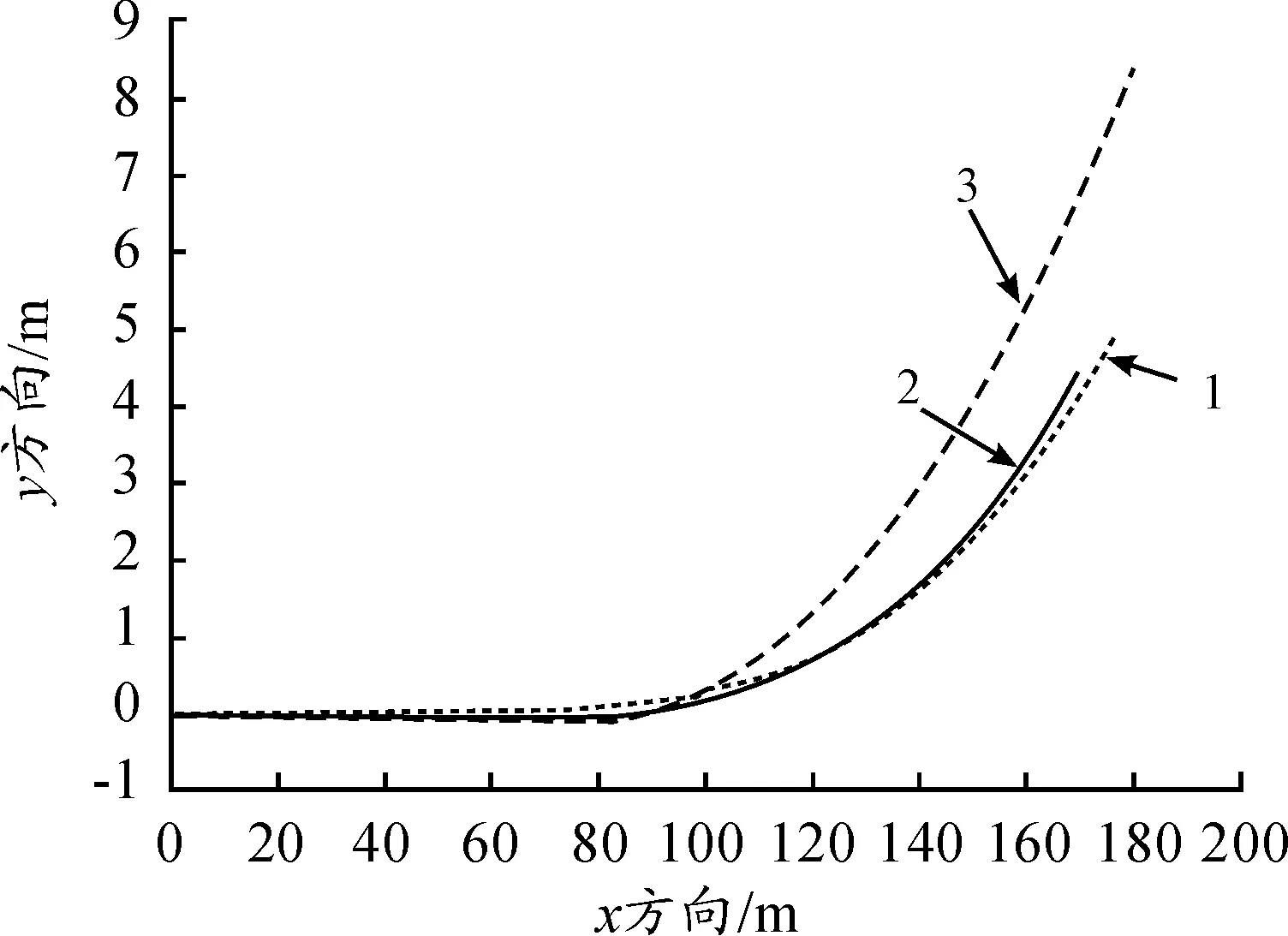
图9 车辆轨迹
3.2 仿真结果分析
3.2.1 仿真工况1的结果分析
工况1的结果显示,在不变速比情况下,车辆进入弯道,侧向加速度持续增加,纵向速度略有减小,发动机转速随着车速降低而缓慢增加。
3.2.2 仿真工况2的结果分析
工况2是速比快速增加的工况。在速比变化期间,由于驱动轮上作用的驱动力变为阻力(原因见文献[5]的理论分析),此时驾驶员获得的侧偏力方向与转向轮偏转方向相反,导致侧向加速度和纵向加速度都为负(图6、7),因此车辆在减速的同时反向偏转。从轨迹图9中可以看到,工况2的行驶轨迹在速比变化后有一个小幅度的反向移动,然后恢复正常。在2 s时,速比停止变化后,纵向加速度恢复为正值,侧向加速度有一个跳变(图6)。
仿真时间2 s后CVT速比停止增加,此时由于速比变化导致的减速度消失,驱动轮恢复驱动力,侧向加速度恢复正常(图6),车辆开始正常偏转,即开始转弯。
3.2.3 仿真工况3的结果分析
由于工况2在速比达到最大时出现了发动机超速现象,因此工况3在2.5~4 s快速恢复速比,以研究车辆恢复正常转弯后的情况。同时,为了消除由于速比变化率曲线不光滑导致的加速度突变现象,将速比变化率曲线圆滑后再进行仿真研究(图5曲线3)。
该工况下,在1~2.1 s,车辆向转弯方向反向偏转(图6),其后转向恢复为同向。仿真2.5 s以后速比快速变小,此时相当于对车辆施加了额外的驱动力,导致车辆纵向和侧向速度快速增加。在侧向速度图7中,3 s后出现先小幅反向偏转(比工况2小一些)、然后大幅正向偏转的情况,在3.8 s出现侧向加速度的峰值(图6,约为0.2g),车辆获得了更大的侧向速度;纵向速度先减小而后快速增加(图8),车辆加速过弯。4 s后,速比停止变化,由此带来的侧向加速度变化消失,侧向加速度下降,但略高于工况1,这是由于此时工况3的纵向和侧向速度比其他两种工况更高。
3.2.4 工况对比分析
对比工况1与工况2,工况2在速比的快速变化时间段内反向转弯,在纵向上减速,发动机转速快速增加至5 500 r/min。这种发动机工况导致发动机输出扭矩低于工况1的输出扭矩,纵向速度略低于工况1的车速。在轨迹图9中,工况2在第2 s后轨迹稍有反向偏移,与工况1相比,其侧向速度和转弯半径相差不大。
与工况2对比,工况3的速度波动大,3 s后获得了更大的侧向速度和加速度,在车辆加速的同时使得转弯半径减小。对比图8中工况3与其他2种工况的纵向速度,工况3实现了进弯减速、出弯加速的效果,车辆得以快速过弯。但是工况3增加了侧向加速度,在实际控制中需要防止侧向加速度过大而导致车辆侧翻的危险。在高速过弯时,若趋于极限侧翻工况,则工况2的控制策略的安全性更好。
但是不管何种快速变化的速比都会导致驱动力变为反向阻力,使得车辆与驾驶员意图行驶的方向反向偏离,因此如何协调速比变化率和行驶轨迹需要更深入的研究。
4 结束语
本文建立了多自由度的整车与CVT传动系统耦合模型,研究了CVT大的速比变化率对车辆转弯时纵向、侧向运动的影响。通过不同速比变化规律的仿真对比发现,在车辆进入转弯工况时,可以通过快速增加速比获得一定的减速效果,然后再快速恢复速比,从而得到更大的侧向加速度,最终获得更小的转弯半径,帮助驾驶员加速过弯。也可以在有高速侧翻危险的工况下选择不恢复速比的控制策略,以获得更安全的过弯效果。
由于车辆进入弯道的曲率、驾驶员操作意图等信息很难获取,因此如何确定在高速弯道中进行更精确的CVT速比控制,乃至制定更安全合理的控制策略都还有待进一步研究。
猜你喜欢
当代水产(2022年6期)2022-06-29 01:12:20
北京航空航天大学学报(2021年4期)2021-11-24 01:12:56
汽车观察(2018年12期)2018-12-26 01:05:42
金桥(2018年4期)2018-09-26 02:24:46
劳动保护(2018年8期)2018-09-12 01:16:14
光学精密工程(2016年3期)2016-11-07 09:03:52
通信电源技术(2016年1期)2016-04-16 04:57:35
汽车工程(2016年11期)2016-04-11 10:57:53
西北工业大学学报(2015年1期)2016-01-19 03:29:56
黑龙江工程学院学报(2015年5期)2015-12-04 01:39:45