感知与规避技术中的入侵目标检测的特征选择∗
2019-02-27 08:31钟佩仪曹云峰
计算机与数字工程 2019年2期
钟佩仪 曹云峰 丁 萌
(1.南京航空航天大学航天学院 南京 210016)(2.南京航空航天大学民航学院 南京 210016)
1 引言
近年来,无人机在军事和民用方面展现了很大的应用潜力,由于无人机在智能化、监控、侦查等方面表现出了广阔的前景,并且与有人机相比成本更低,使用更加灵活[1~5],因此无人机在军用和民用方面都受到了前所未有的关注。无人机在现代数字战场中的突出优点和惊人表现,使得各国竞相研制,目前无人机已经被各国大量使用。不同种类的无人机在各个领域的应用均获得了极大的成功,但与此同时所带来的问题是:随着不同类型无人机的大量使用,中空、低空、超低空的空域变得越来越“拥挤”,给国家空域系统带来越来越严峻的安全隐患。无人机的广泛应用使得无人机之间和无人机对有人机造成了直接的威胁,如何规避无人机和其他飞机的碰撞成为了目前需要关注的问题。对于有人机而言,可以通过机载雷达收发机和机组人员完成环境感知并操纵飞机规避威胁目标来确保有人机的安全,而这一个过程被称之为“探测与规避”。但是对于无人机而言,并没有机组人员来承担环境感知与威胁规避的职能,因此当无人机系统集成到国家空域系统中时,无人机只能单纯依靠机载设备来完成环境感知与威胁规避,实现和有人机“探测与规避”相同的功能,而这个过程被称之为“感知与规避”。感知与规避的过程如图1所示。
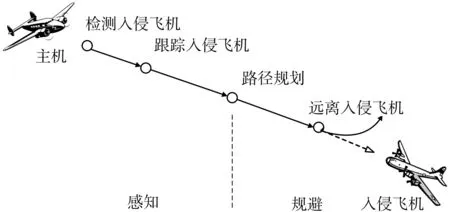
图1 感知与规避系统的过程
感知与规避系统的过程主要分为感知和规避两个部分[6~7],其中感知是规避的前提,通过机载传感器完成对入侵目标的检测和识别;规避是感知的归宿和目的,在感知的基础上完成对入侵目标威胁度的评估,为规避威胁提供重要的参考依据。在机载传感器的选择上,由于视觉传感器比其他传感器有更好的SWAP(尺寸,重量和能耗)特征,完全自主的工作方式可检测到没有安装相同的传感器的目标使其可靠性、安全性更高,因此本文主要是以基于视觉的感知与规避技术为研究背景,以机载视觉传感器所提供的视频图像作为研究对象。
为了保证对入侵目标检测算法的实时性,在提取测试图像的特征之前,一般通过提取测试图像的感兴趣区域(ROI)来减少提取特征的工作量以达到加快算法的作用[8~9]。常用的提取ROI区域算法包括基于显著性分析的IT,MZ,SR,GB等,但是来自于微软研究院的Piotr等在2014年提出了Edge-Boxes算法[10],利用边缘信息(Edge)来确定目标可能存在的方框。Edge-Boxes算法优势在于采用的是纯图像的方法,不需要任何先验知识,没有复杂的运算过程,最重要的是该算法的运行速度很快。因此本文采用Edge-Boxes算法提取ROI区域,作为图像特征提取的前提。
得到ROI区域还需要通过识别模块来确定入侵目标在哪一个或者哪几个ROI中。经典的识别算法都是由特征提取和分类器设计两部分构成。识别算法的构成如图2所示。

图2 入侵目标识别算法
尺度不变特征转换(Scale-Invariant Feature Transform,SIFT)特征[11]是基于物体上的一些局部外观的兴趣点而与影像的大小和旋转无关。对于光线、噪声、些微视角改变的容忍度也相当高。基于这些特征,它们是高度显著而且相对易于获取,在庞大的特征数据库中,很容易辨识物体而且鲜有失误。使用SIFT特征描述对于部分物体遮蔽的检测率也相当高,甚至只需要3个以上的SIFT物体特征就足以计算出位置和方位,在现今的电脑硬件速度下,运算速度可达到即时运算。SIFT特征的信息量大,适合在海量数据库中快速准确匹配。但是SIFT中每个feature需要用128维的向量来描述,因此计算量相对很大。
方向梯度直方图(Histogram of Oriented Gradient,HOG)特征[12]是一种在计算机视觉和图像处理中用来进行物体检测的特征描述子。其本质是统计图像的梯度信息,而梯度主要存在于边缘的地方,所以HOG特征能够较好的描述各类物体轮廓形状。由于HOG是在图像的局部方格单元上操作,所以它对图像几何的和光学的形变都能保持很好的不变性,这两种形变只会出现在更大的空间领域上。其次,在粗的空域抽样、精细的方向抽样以及较强的局部光学归一化等更好地完成了照射、阴影不变性。HOG特征结合SVM分类器已经被广泛应用于图像识别中。
因为当前没有一种统一的特征提取方法适用于多数目标分类问题,而经典的算法SIFT,HOG等,都有自身的特殊性和局限性,所以在本文中为了寻找更加合适于入侵目标检测的特征提取方法,分别使用这两种特征作为sc-SPM算法[13~16]的底层特征对入侵目标检测,通过分析检测结果来判断哪种特征更加适合入侵目标检测。
2 入侵目标检测算法
入侵目标检测算法主要分为三步:第一是对检测图像提取ROI区域;第二是对ROI区域提取特征;第三是用SVM分类器分类识别ROI区域,圈出有入侵目标所在的区域。
2.1 基于Edge-Boxes的ROI区域提取
在本节中,基于Edge-Boxes的ROI区域提取主要分为两步:第一是使用Edge-Boxes算法得到大量的Proposals(目标可能会在的区域)以及每个Proposals的分数;第二是通过设定适当的分数和面积的阈值结合NMS(非极大值抑制算法)来优化Proposals而得到少量的面积适中的ROI区域。具体流程如图3所示。

图3 提取ROI区域过程
提取ROI区域的第一步——Edge-Boxes算法:计算输入图像的特征,通过特征检测图像的边缘信息,然后将近乎在一条直线上的边缘点,集中起来形成一个边缘信息组(Edge group),计算两两边缘信息组之间的相似度,相似度越高意味着这两个组的边缘信息是同一个轮廓的可能性越高。计算相似度的公式如下:

a( )si,sj指的是两组之间的相似度;γ是用来调整相似性对方向改变的敏感度,一般取值为2。
如果两边缘信息组之间的相似度低于阈值0.05的舍弃,高于阈值0.05则保存。给保存的每一边缘信息组一个权值,然后把权值均为1的边缘信息组归为框内轮廓上的一部分,把权值为0的边缘信息组归为框外或者与框边界重叠的轮廓的一部分。计算权值公式如下:

T是指从框框的边缘开始到达si的边缘信息组序列集合。
第二步:在边缘信息组处理后得到的Proposals数量过于庞大,边框过于密集,其中面积或大或小,对后续的分类太过繁杂,效率不高。所以需要对此做优化,得到性能良好的ROI区域。
对所得Proposals进行评分,评分公式如下:
进一步根据得分的高低对Proposals做一个降序排列,设定一个分数阈值(Score),保存分数高于S的Proposals,舍弃分数低于S的Proposals。然后再计算留下的Proposals的面积,并做一个升序排列,设定一个面积阈值(Area),保留面积低于Area的Proposals,舍弃高于Area的Proposals。剩下的Proposals呈现的特点是边框面积过小,但在完整轮廓处较为密集,因此对这些Proposals做非极大值抑制(NMS)即可得到面积适当,较为稀疏的ROI区域。
2.2 基于sc-SPM的特征提取
本文所采用的基于稀疏编码和空间金字塔匹配模型的特征学习方法过程如图4所示。首先对ROI图像块提取底层特征(SIFT,HOG),其次在空间金字塔框架下以稀疏编码为基本手段对所提取的特征作进一步的抽象,最后以特征池化思想为基础,实现局部特征的聚合,完成整个特征提取的过程。

图4 基于稀疏编码和空间金字塔匹配模型的特征学习过程
2.2.1 第一层特征提取
SIFT算法利用高斯金字塔和高斯差分(Difference of Gaussian,DoG)金字塔实现图像特征点和该点处尺度的自动选择。高斯金字塔由图像与不同尺度的高斯核卷积得到,差分金字塔(DoG)是相邻两尺度空间函数之差,用D( x,y,σ)表示,输入图像为I( x,y),由式(4)计算得到:
在完成高斯差分金字塔的构建后,SIFT算法按以下步骤提取特征点和生成128维特征向量:
1)在DoG金字塔中,DoG尺度空间中中间层(最低和最顶层除外)的每一个像素与同一层相邻的8个像素以及它上一层和下一层的9个相邻像素共26个相邻像素点进行比较得到局部极值;
2)利用特征点邻域像素的梯度方向分布特性为每个特征点指定方向参数,使相应特征具备旋转不变性;
3)对于任意一个特征点,在它所在的尺度空间中,取其为中心的16×16像素大小的领域,再将这个领域均匀分成4×4个子区域,并对每个子区域计算梯度方向直方图。将各个子区域的直方图组合成16×8=128维的特征向量。
HOG算法是将图像分成小的连通区域(细胞单元,cell)。然后采集细胞单元中各像素点的梯度的或边缘的方向直方图。最后把这些直方图组合起来就可以构成HOG特征描述器。具体步骤如下:
1)将输入图像灰度化,采用Gamma校正法对输入图像进行颜色空间的标准化(归一化);目的是调节图像的对比度,降低图像局部的阴影和光照变化所造成的影响,同时可以抑制噪音的干扰;
2)将归一化之后的图像分割为8*8个像素的细胞单元(cell),把梯度方向平均划分为9个区间(bin),在每个细胞单元里面对所有像素的梯度方向在各个方向区间进行直方图统计,得到一个9维的特征向量;
3)每相邻的4个细胞单元构成一个块(block),把一个块内的特征向量联起来得到36维的特征向量,用块对样本图像进行扫描,扫描步长(8个像素)为一个单元。最后将所有块的特征串联起来,就得到了输入图像的36维的HOG特征描述器。
2.2 .2 第二层特征提取
利用空间金字塔方法对图像进行空间多尺度划分,然后利用稀疏编码对每个局部块的底层特征进行编码得到特征向量,之后再利用权值串接每个特定局部块中的语义信息得到图像多尺度空间特征,完成目标的特征提取。
稀疏编码即是在一组过完备基向量(过完备字典D)中选择少量基(稀疏系数X)的线性组合来表示样本数据(输入图像的底层特征Y),计算公式如下:

T0是稀疏系数非零项的最大值。
过完备字典D可以通过K_SVD(The K-means Singular Value Decomposition)算法训练大量样本得到。从线性组合角度看,K-SVD训练算法的目标函数可表示为

T0是稀疏系数非零项的最大值。
式(6)中计算过程是一个不断迭代的过程:
1)设字典D是固定的,利用稀疏向量计算方法OMP,可以得到基于字典D的输入样本Y的稀疏表示的稀疏矩阵A;
2)根据系数矩阵A,找到更好的字典D。
2.2.3 最大池化
最大池化是对图像中不同位置的特征进行聚合统计,降低计算特征的难度,避免出现过拟合现象。设XM×N是求得的M个向量的N维稀疏系数,则最大值池化方程如下所示:Xij是稀疏系数矩阵的第i行,第j列元素。

对整张图像基于金字塔框架下分割以后的每个区域进行特征池化,并对最大池化后的特征进行组合,从而得到最终我们所需要的特征。
3 实验结果与分析
为了验证底层特征选取不同对检测识别入侵目标的影响,本文设计两种不同底层特征的入侵目标检测算法作比较。在本次实验过程中,所有的实验图像均来自于Flight-Gear V3.4模拟软件获得。首先在实验图像中抽取1000幅图像作为样本图像分别提取SIFT和HOG特征,并以此为基础训练过完备字典D以及SVM分类器,再选取200幅图像进行入侵目标检测实验,并用指标IoU(Intersection over Union)和召回率(recall)曲线来评判检测结果的好与坏。
3.1 训练过完备字典
利用K-SVD进行过完备字典训练的步骤如下:
1)从样本图像中随机性选取100000个大小为
16×16 的图像块;
2)对每个图像块提取出一个128维的SIFT特征向量和一个36维的HOG特征向量;
3)将所有100000个图像块的特征向量组合成一个矩阵,SIFT特征矩阵的大小为128×100000,HOG特征矩阵大小为36×100000;
4)利用K-SVD算法对该矩阵进行训练,设置训练后的字典大小都为128×1024。
3.2 训练SVM分类器
随机选择500幅正样本、500幅负样本进行训练,具体训练方法按以下步骤完成:
1)提取出500幅正样本的SIFT特征向量和HOG特征向量;
2)提取出500幅负样本的SIFT特征向量和HOG特征向量;
3)利用训练函数分别对正负样本SIFT特征向量和正负样本HOG特征向量进行训练,得到两个分类器参数。
3.3 检测入侵目标实验结果
为了实验图像的多样性,从Flight-Gear V3.4模拟得到的实验图像中选取200幅不同背景不同天气的图像作为检测算法的实验图像,首先用基于Edge-Boxes的ROI提取算法对每一幅图像提取ROI区域,如表1第一列所示,浅色框是指ROI区域,深色框是指真值图;其次对提取的ROI区域分别用基于HOG和SIFT特征的入侵目标检测算法检测和识别目标,检测结果如表1第二列和第三列所示,浅色框是指检测结果,深色框是指真值图。
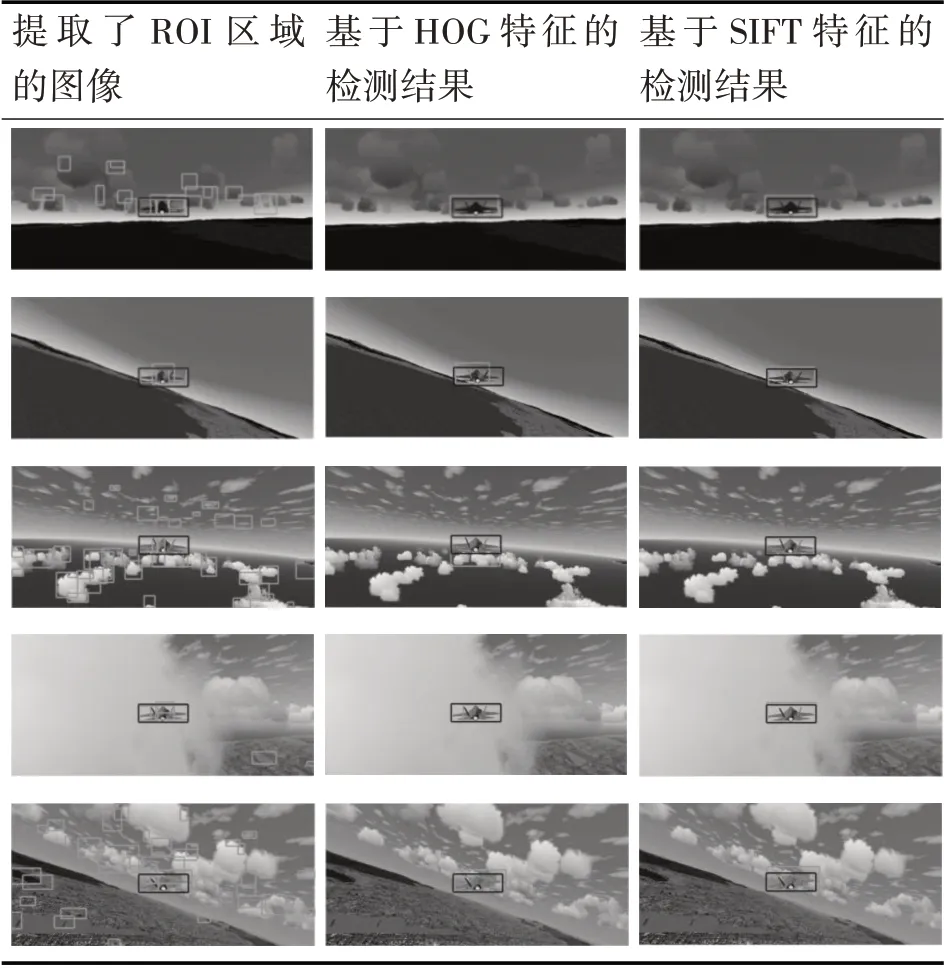
表1 检测入侵目标实验结果
从实验结果看,同一幅实验图像,基于HOG特征的检测结果跟基于SIFT特征相比是差一点的。为了更加直观地比较两者的差异,本文选择IoU和recall这两个常用指标衡量检测结果的好坏。IoU是指检测框和真值框交区域和并区域的比值,IoU比值越高则检测结果越贴近真值则表示定位越准确。经常取IoU值为0.5来衡量结果的好与坏,大于等于0.5都可以当做是好的检测结果。recall(召回率)是指检测出来的目标个数于整个数据集中所有目标个数的比值,衡量的是检测算法的查全率,查全率越高,则检测出来的目标个数就越多,算法效果越好。下面用recall-IoU曲线来描述检测结果的好坏,如图5所示。
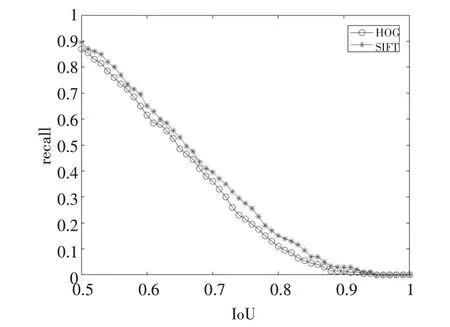
图5 recall-IoU曲线图
图5中圆形曲线是基于HOG检测算法的recall-IoU曲线,星形曲线是基于SIFT检测算法的recall-IoU曲线。当IoU=0.5时,基于SIFT的检测算法的recall是高达0.9的,而基于HOG的检测算法的recall则不到0.9。当IoU取值越来越大,即对检测结果与真值图贴近度要求越来越高,而召回率(recall)也会有所下降,但是星形曲线是一直高于圆形曲线的,也就是说在recall随着IoU的增加而减少的过程中,基于SIFT算法的recall是一直高于基于HOG算法的recall的。从检测结果来看,基于SIFT的检测算法是要优于基于HOG检测算法的。
4 结语
本文在对入侵目标检测算法的图像特征选择上讨论了经典的SIFT和HOG两种特征提取算法,通过对检测结果的比较,发现在同样的IoU值上,基于SIFT的检测结果的召回率(recall)是要比基于HOG的召回率要高。在设计对入侵目标检测算法中,SIFT和sc-SPM的结合所表现出来的检测性能是要比HOG结合sc-SPM算法的检测性能要更优。所以选择SIFT特征提取算法作为基于sc-SPM的入侵目标检测算法的底层特征。
猜你喜欢
保定学院学报(2022年2期)2022-04-07
中学生理科应试(2021年11期)2021-12-09
北京航空航天大学学报(2019年9期)2019-10-26
电子制作(2019年15期)2019-08-27
电子制作(2019年15期)2019-08-27
数学学习与研究(2018年15期)2018-11-12
电机与控制学报(2018年9期)2018-05-14
通信产业报(2016年44期)2017-03-13
中学数学研究(2008年11期)2008-01-05
雕塑(1999年2期)1999-06-28