机器人与腹腔镜手术在右半结肠癌治疗中的对比分析
2019-02-13 01:33孙跃明封益飞唐俊伟黄远健
腹腔镜外科杂志 2019年12期
孙跃明,封益飞,唐俊伟,黄远健,张 悦
(南京医科大学第一附属医院,江苏 南京,210029)
结肠癌是我国常见的恶性消化道肿瘤之一[1-2]。近年,随着人们生活水平的提高,结肠癌的发病率不断升高。同时,结肠癌的发病部位正出现“右移”趋势,右半结肠癌的发病率显著升高。右半结肠癌的治疗目前仍以根治性切除为主,随着医学技术的不断进步,腹腔镜手术凭借创伤小、康复快等优势,已广泛应用于右半结肠癌的治疗,目前腹腔镜右半结肠全系膜切除术已成为治疗右半结肠癌的标准术式。2000年达芬奇机器人手术系统正式应用于临床[3],并于2002年首次应用于结肠疾病[4]。达芬奇机器人具备裸眼3D高清视野、灵活的高自由度机械臂、动作校正及抖动过滤、降低术者疲劳度等诸多优势,受到诸多外科医生的青睐。然而,达芬奇机器人手术系统在治疗右半结肠癌中的报道较少,其安全性、可行性及近期疗效仍需进一步研究。本研究回顾分析了2017年6月至2019年5月南京医科大学第一附属医院结直肠外科行达芬奇机器人或腹腔镜右半结肠癌根治术的临床资料,以评价达芬奇机器人系统治疗右半结肠癌的临床价值。
1 资料与方法
1.1 临床资料 共272例患者纳入分析,其中机器人手术组75例,腹腔镜手术组197例。术前均常规行肠镜、腹部CT、胸部X线、肿瘤标志物、血常规等检查,完善术前诊断及分期。手术适应证与禁忌证严格按照《腹腔镜结肠直肠癌根治手术操作指南(2006版)》[5]、《机器人结直肠癌手术专家共识(2015版)》[6]。
1.2 手术方法 手术均由同一术者完成,均采用尾侧中间入路行右半结肠癌根治术。腹腔镜与机器人手术Trocar孔位置、数量分别参照《腹腔镜结肠直肠癌根治手术操作指南(2006版)》、《机器人结直肠癌手术专家共识(2015版)》。具体手术步骤:(1)打开回结肠血管蒂下方自然皱襞处的系膜层,通过回结肠系膜背侧指引打开系膜,找出右侧Toldt间隙,钝、锐性向头侧及外侧拓展。(2)解剖回结肠血管及肠系膜上血管,以肠系膜上动脉为解剖学标志,于其左侧自下而上打开浆膜,清扫肠系膜上动脉表面的淋巴脂肪组织,裸化肠系膜上动脉及肠系膜上静脉。(3)沿肠系膜上血管依次向头侧显露各血管分支,根部清扫淋巴结并离断回结肠动静脉、右结肠动脉、中结肠动脉右支或中结肠动脉主干。于胰头前方的肠系膜上静脉右前侧壁找到胃结肠静脉干,也可同步分离Toldt间隙及胰十二指肠前筋膜下间隙,可见跨越十二指肠前壁的右结肠静脉。游离各静脉分支,并在汇合处离断胃结肠静脉干的结肠支,继续向外、头侧拓展Toldt间隙及胰十二指肠前筋膜下间隙。(4)打开胃结肠韧带,将胃系膜与结肠系膜分开,胰腺下缘与下方分离汇合后进一步向肝曲方向离断肝结肠韧带,由上而下沿右结肠旁沟向尾侧打开“黄白交界线”融合筋膜,直至回盲部、回肠末端。转向回盲部自下而上、自外向内继续分离升结肠、回盲部,充分游离回肠末端,直至十二指肠水平部以下、肠系膜上静脉左侧。(5)患者均行体外吻合,取上腹正中切口6~10 cm,提出游离的右侧结肠、回肠末端,离断两侧肠管后行回肠—结肠端侧吻合术。
1.3 观察指标 (1)一般信息:性别、年龄、BMI、术后病理类型、肿瘤分期。(2)安全性及近期疗效指标:手术时间、术中出血量、术后住院时间、术后首次通气时间、术后首次排便时间、术后拔管时间、清扫淋巴结数量、术后并发症发生率。
1.4 统计学处理 应用SPSS 21.0、GraphPad Prism 5、Excel 2016软件对数据进行整理与分析,符合正态分布的计量资料以均数±标准差表示,方差齐者两组比较采用t检验,方差不齐采用t’检验,计数资料两组比较采用χ2检验,P<0.05为差异有统计学意义。
2 结 果
两组患者在性别、年龄、BMI、病理类型、肿瘤分期方面差异均无统计学意义,见表1。机器人组手术时间长于腹腔镜组,差异有统计学意义(P<0.05)。与腹腔镜组相比,机器人组住院时间更短,术后首次排便、拔引流管更早。而两组术中出血量、术中淋巴结清扫数量、术后首次通气时间、术后并发症发生率差异均无统计学意义。见表2。

组别性别(n)男女年龄(岁)BMI(kg/m2)病理类型(n)腺癌粘液腺癌印戒细胞癌肿瘤分期(n)Ⅰ期Ⅱ期Ⅲ期腹腔镜组1286961.8±11.024.2±2.9157319279278机器人组482760.3±10.223.8±3.059133143328t/χ2值0.0231.0350.8020.0350.1020.0001.0440.1590.117P值0.8810.3020.4230.8510.7491.0000.3070.6900.733

组别手术时间(min)术中出血量(mL)术后住院时间(d)首次通气时间(h)首次排便时间(h)引流管拔除时间(d)腹腔镜组87.7±10.649.8±22.07.6±1.843.2±9.670.3±9.56.9±1.9机器人组108.1±14.446.6±22.46.9±1.641.4±9.460.2±9.56.1±1.2t/χ2值11.151.0542.8281.3537.8243.216P值0.0010.2930.0050.1780.0010.002
续表2

组别淋巴结清扫数量(n)吻合口漏[n(%)]术后出血[n(%)]切口感染[n(%)]乳糜漏[n(%)]腹腔镜组24.0±4.91(0.5)4(2.0)5(2.5)8(4.1)机器人组22.7±4.702(2.7)2(2.7)3(4.0)t/χ2值1.8850.0000.0000.0000.000P值0.0611.0001.0001.0001.000
3 讨 论
腹腔镜手术在结直肠领域的发展已有20余年,其安全性、有效性及可行性已被多项随机对照实验证实[7-8]。同时腹腔镜手术具有切口更小、恢复更快、视野更清晰、清扫彻底等诸多优点,已成为大部分结直肠癌的首选术式。然而,腹腔镜手术在临床实践中仍然面临狭小空间难操作、团队配合要求高、学习曲线长、画面不稳定等局限性,为达芬奇机器人系统应用于微创外科提供了新的发展空间[9]。达芬奇机器人手术系统主要由医生操作台、机械臂、图像系统三部分组成(图1),与传统腹腔镜手术相比,机器人手术展现出诸多优势:(1)高清的裸眼三维视野:机器人手术系统将术野放大10~15倍,帮助术者更清晰地辨认血管、神经,同时视野具备立体的纵深感,增加了术者对手术层面的把控;(2)高自由度的机械臂:机械臂在床旁由1条镜头臂、3条操作臂组成,操作臂在术中装置专用器械后可完成7个自由度的旋转,多种反关节的操作摆脱了人体关节结构的限制,能在狭小的空间、困难的角度方便操作。同时,机械臂的防震颤功能使手术过程更为流畅。(3)稳定自由的术野调节:术中镜头由镜头臂固定,避免了镜头抖动的出现;同时,镜头由术者自行控制,能为术者提供最佳的手术视野,避免了扶镜手因配合不当影响手术进度。(4)舒适的操作方式:使用机器人手术系统无需长期站立,术者坐位完成手术,保存了术者的体力,减轻了生理疲劳。尽管如此,达芬奇机器人手术系统因其相对昂贵的费用、触觉反馈及力反馈缺失、疗效及安全性的不确切,在临床实践中仍饱受争议。
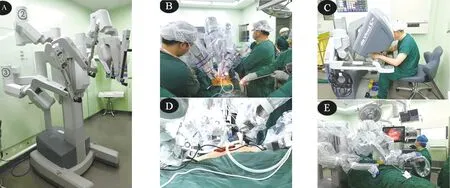
图1 达芬奇机器人手术系统(A:达芬奇机器人机械臂系统;B:术者将机械臂置入Trocar内;C:术者在术中使用医师操作台;D:机械臂在腹腔内进行操作;E:助手通过辅助孔协助主刀操作)
我们的研究表明,机器人较腹腔镜右半结肠癌根治术的手术时间更长,这与既往研究相似[10]。归其原因,一方面可能是机器人手术的开展时间较短,术者仍处于达芬奇机器人手术系统的学习提升阶段,达到与腹腔镜手术相同的熟练度仍需一定的时间。另一方面可能由于机器人机械臂在术前、术中的装卸过程相对复杂,增加了部分手术耗时,需要不断通过团队磨合缩短装配时间。笔者认为,通过不断训练,机器人右半结肠癌根治术最终能达到与腹腔镜手术相似的手术耗时,甚至更快。此外,机器人手术系统由于触觉反馈及力反馈的缺失常被人诟病,笔者认为,机器人手术系统反馈缺失确实存在,但通过长期的训练与适应,仍然能通过机器人手术系统感受到一定的力反馈。淋巴结清扫数量是评价手术根治性的重要指标,本研究中,机器人组获取的淋巴结数量与腹腔镜组相似,这与以往的研究结果一致[11-12]。本结果在一定程度上反映机器人右半结肠癌根治术的根治性是可靠的。当然,仍需要更多的长期随访数据证实这一观点。在术后指标中,本研究结果表明,机器人手术在缩短住院时间、术后排便时间、拔除引流管时间方面具有明显优势,而在术后并发症方面无明显差异。这些结果表明,机器人手术在加快术后恢复方面的优势更大。笔者认为,可能由于机器人手术在术中具备更清晰的视野,能更清晰地辨认神经丛细微结构,更好地保护神经与器官功能,同时机械臂能在狭小的空间完成精细操作,减少了术中的副损伤,使手术创伤小,术后疼痛轻,加速了术后恢复。
随着机器人手术的不断开展,其安全性、有效性也不断得到肯定。然而,在结直肠癌的治疗中,我们远未进入“机器人时代”。一方面由于机器人手术系统购置成本及维护成本高,国内多数医院尚不具备机器人手术系统,同时机器人手术费用高,在临床推广存在一定困难。另一方面,由于机器人手术在结直肠癌治疗中的近期疗效与远期疗效报道较少,目前尚无定论,更多关于机器人手术在结直肠癌领域安全性及可行性的研究亟需被开展。我们期待达芬奇机器人手术系统能为外科手术带来一场新的革命。
猜你喜欢
中老年保健(2021年11期)2021-08-22
心电与循环(2021年1期)2021-02-05
医学新知(2019年4期)2020-01-02
基层中医药(2018年7期)2018-12-06
介入放射学杂志(2018年11期)2018-11-20
中国医学影像学杂志(2018年9期)2018-10-17
介入放射学杂志(2018年7期)2018-07-30
中国医药指南(2018年21期)2018-01-22
作文周刊·小学二年级版(2017年6期)2017-07-12
中国卫生(2016年6期)2016-11-23