
Ka波段机载双模式干涉SAR系统设计及测量精度分析
2019-01-17 01:06郑世超孙志强孔令振
上海航天 2018年6期
郑世超,王 辉,孙志强,孔令振
(1.上海航天技术研究院 毫米波遥感技术重点实验室,北京 100086;2. 上海航天技术研究院 毫米波遥感技术重点实验室,上海 201109)
0 引言
与传统低频段合成孔径雷达(SAR)相比,Ka波段SAR系统具有以下优点:一是分辨率更高。Ka波段可用的带宽更大,相同波束宽度下天线尺寸更小,因此Ka波段SAR比低频段SAR容易获得更高的距离向和方位向分辨率。二是体积更小、重量更轻。Ka波段天线和射频模块的尺寸更小,具有体积小的特点。三是目标轮廓效应更加明显。雷达工作频段越高,目标轮廓效应越明显,因此Ka波段目标几何外形的轮廓能产生更强的回波,有利于获取清晰的目标细节。
近几年,随着核心功率器件水平的不断提升,美国、欧洲开始研究Ka波段在SAR领域尤其在干涉SAR领域的应用[1]。与低波段SAR系统相比,Ka波段干涉SAR能以较短的干涉基线获得相同的干涉测量精度,大幅降低了高精度干涉测量的实现难度[2-3],能够在同一系统中实现高精度的顺轨干涉与交轨干涉。基于以上特点,本文提出了1套Ka波段双模式干涉SAR系统,可用于验证双模式干涉SAR的可行性。
该系统在交轨干涉模式下,针对Ka波段电磁波穿透性较弱的特点,重点验证对水面高度、水流速度的测量能力。考虑到Ka波段SAR系统的损耗较大,该验证系统选取较小的工作视角。在小入射角条件下,水面较强的后向散射系数可大幅降低系统所需的发射功率与天线增益,且根据干涉测高原理,小视角更有利于实现更高的干涉测高精度[4-6]。
在顺轨干涉模式下,为保证测量精度,该验证系统选取较大的工作视角[7-8]。采用数字波束合成扫描接收技术(DBF-SCORE)满足在较大工作视角下系统所需的功率增益积[9-10]。
本文对Ka波段双模式干涉SAR验证系统进行介绍,并给出该系统的参数设计与仿真结果。在此基础上,对该系统在双模式下的干涉测量精度进行了仿真分析,为后续的飞行试验干涉测量性能提供了理论分析依据。
1 Ka波段双模式干涉SAR系统
Ka波段双模式干涉SAR系统主要由三部分组成:天线子系统、雷达数字子系统和稳定平台。系统的组成架构如图1所示。
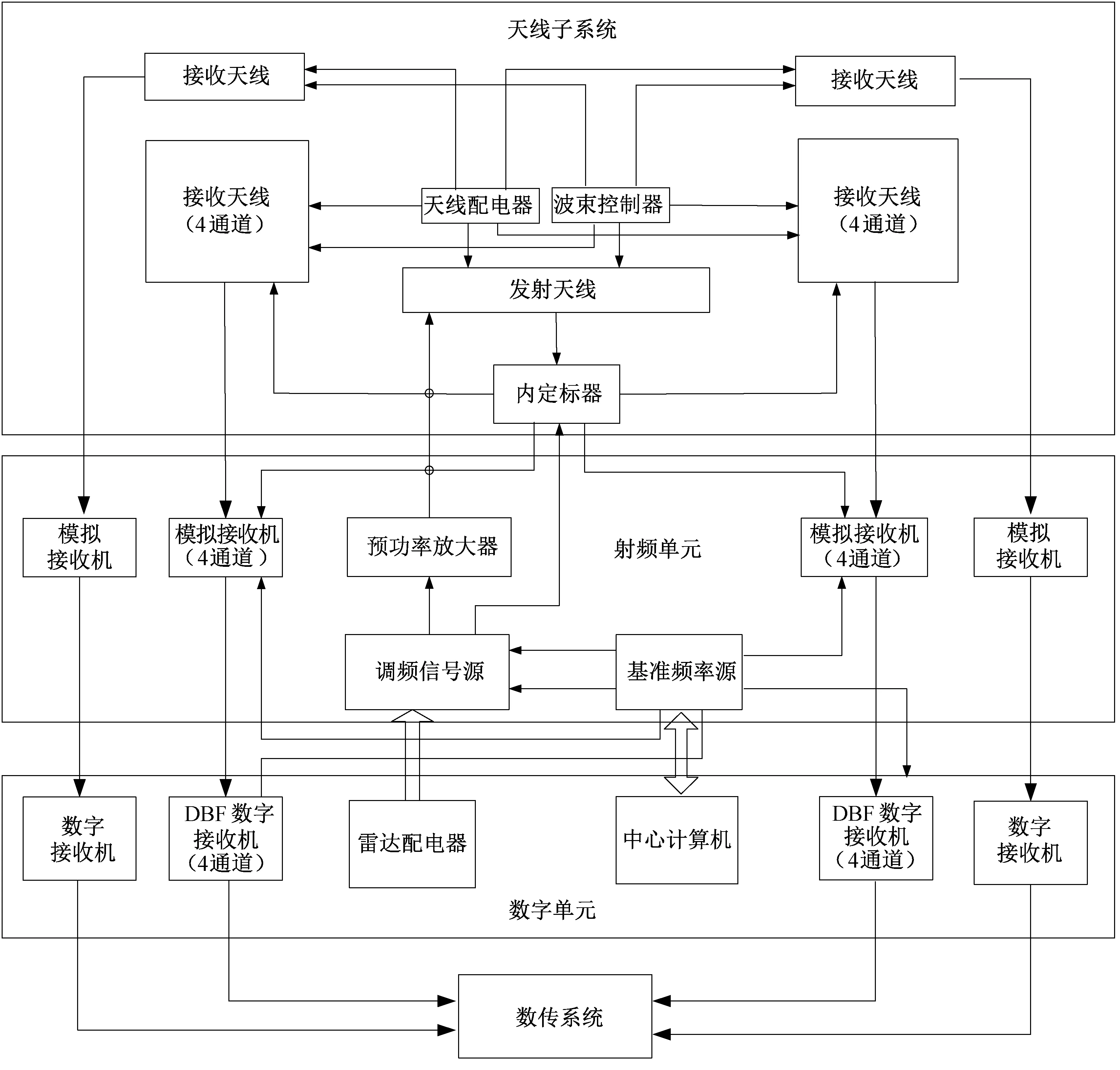
图1 系统组成框图Fig.1 System structure
1.1 天线子系统
天线子系统由天线、频综接收机、内定标器、预功放组成。为了降低天线设计难度,提高天线工作效率,该系统采用天线收发分置设计。发射天线尺寸为450.0 mm×33.6 mm,峰值发射功率为315 W。根据系统工作模式,接收天线可分为交轨天线和顺轨天线两部分。单副交轨天线阵列口径为44.8 mm×450.0 mm,2副交轨天线沿距离向间隔排布,形成224 mm的交轨基线;单副顺轨天线阵列口径为89.6 mm×225.0 mm,2副顺轨天线沿方位向间隔排布,形成225 mm的顺轨基线。其中单副顺轨阵列沿距离向由4个接收子阵构成,每个子阵口径为22.4 mm×225.0 mm。整个天线的布局如图2所示。
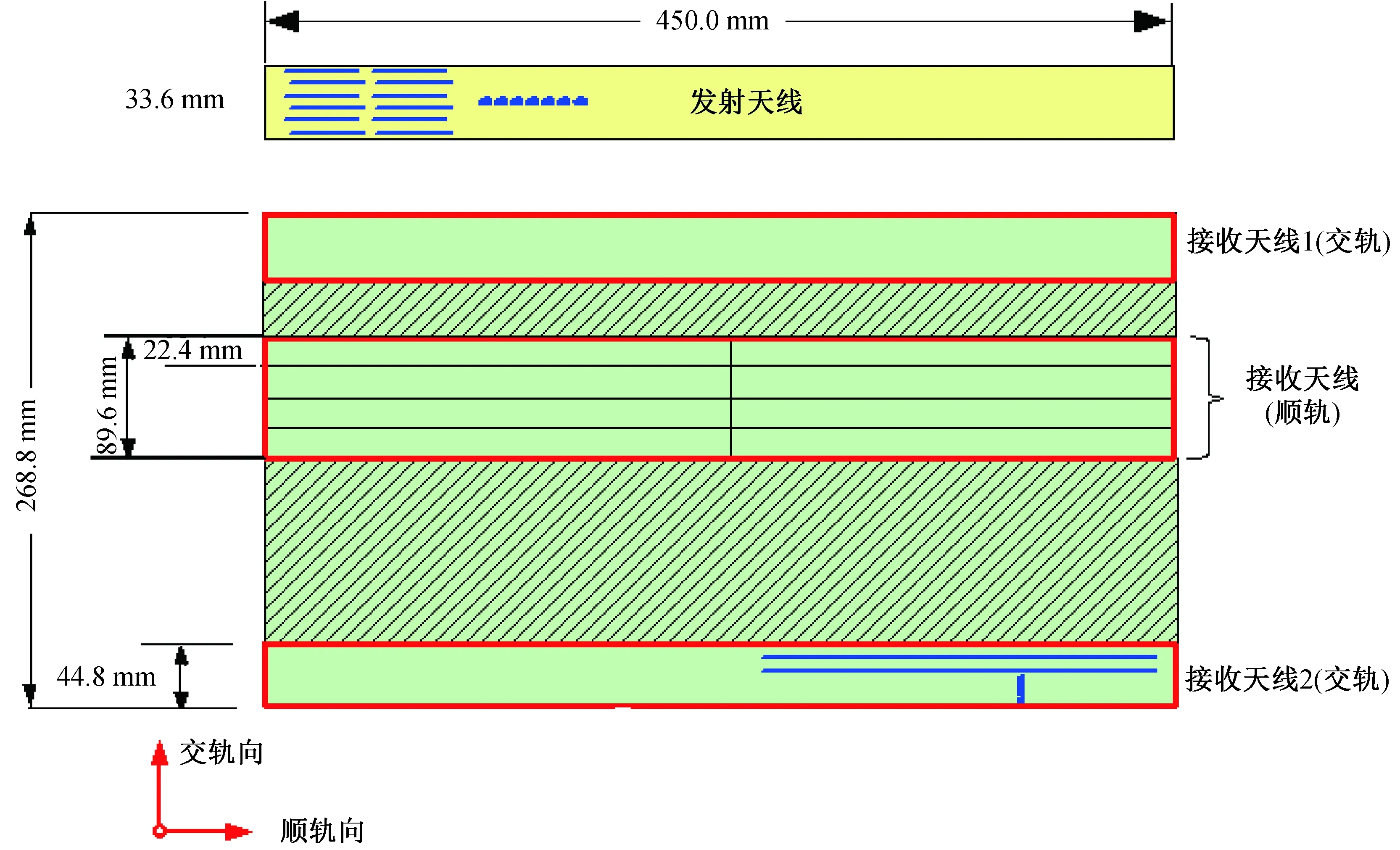
图2 天线布局示意图Fig.2 Antenna architecture
发射天线仿真的天线方向如图3所示。
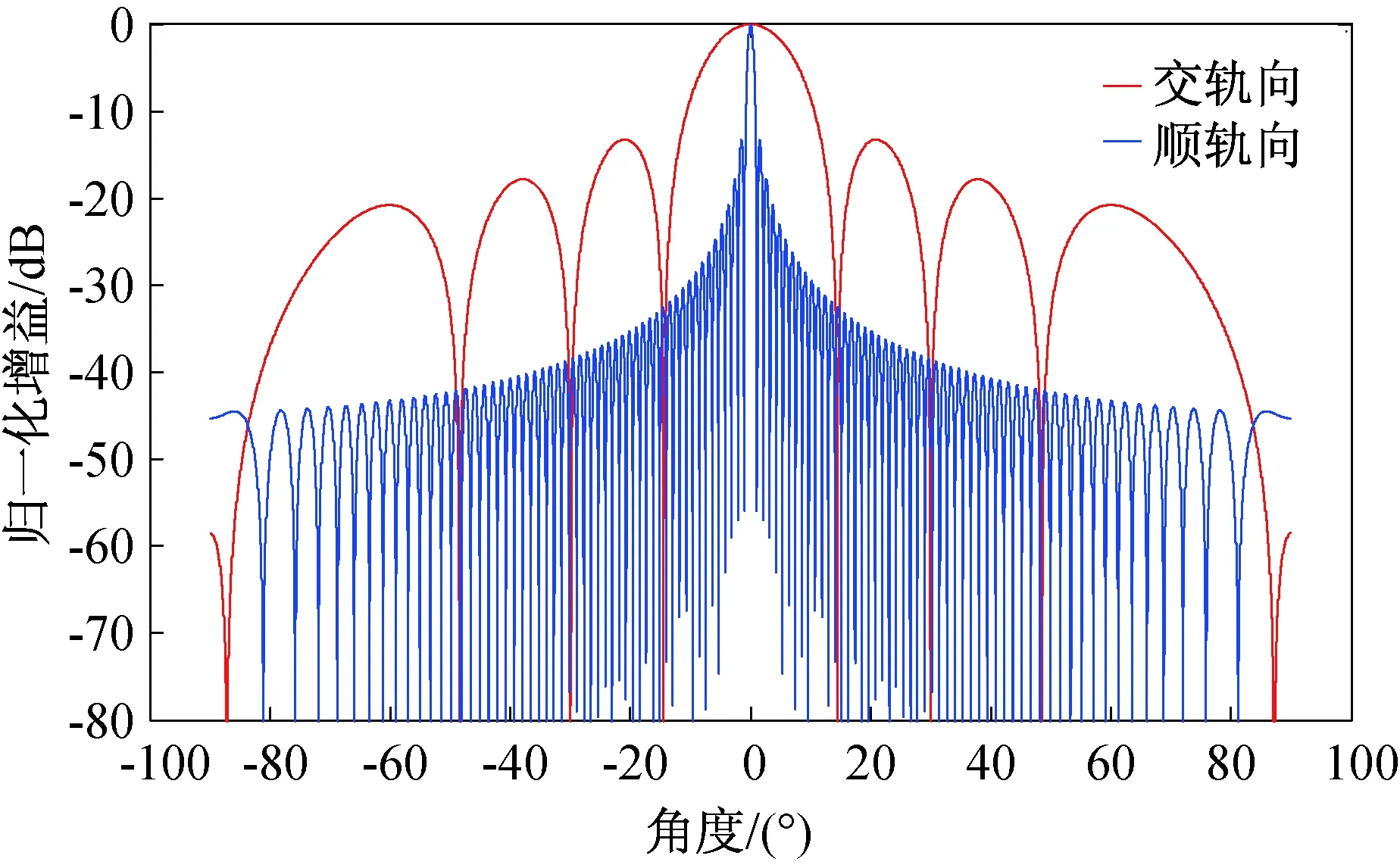
图3 发射天线方向图Fig.3 Transmitting antenna pattern
交轨接收天线仿真得到的天线方向如图4所示。
图4 交轨接收天线方向图Fig.4 Cross-track receiving antenna pattern
顺轨接收天线单个子阵仿真得到的方向如图5所示。
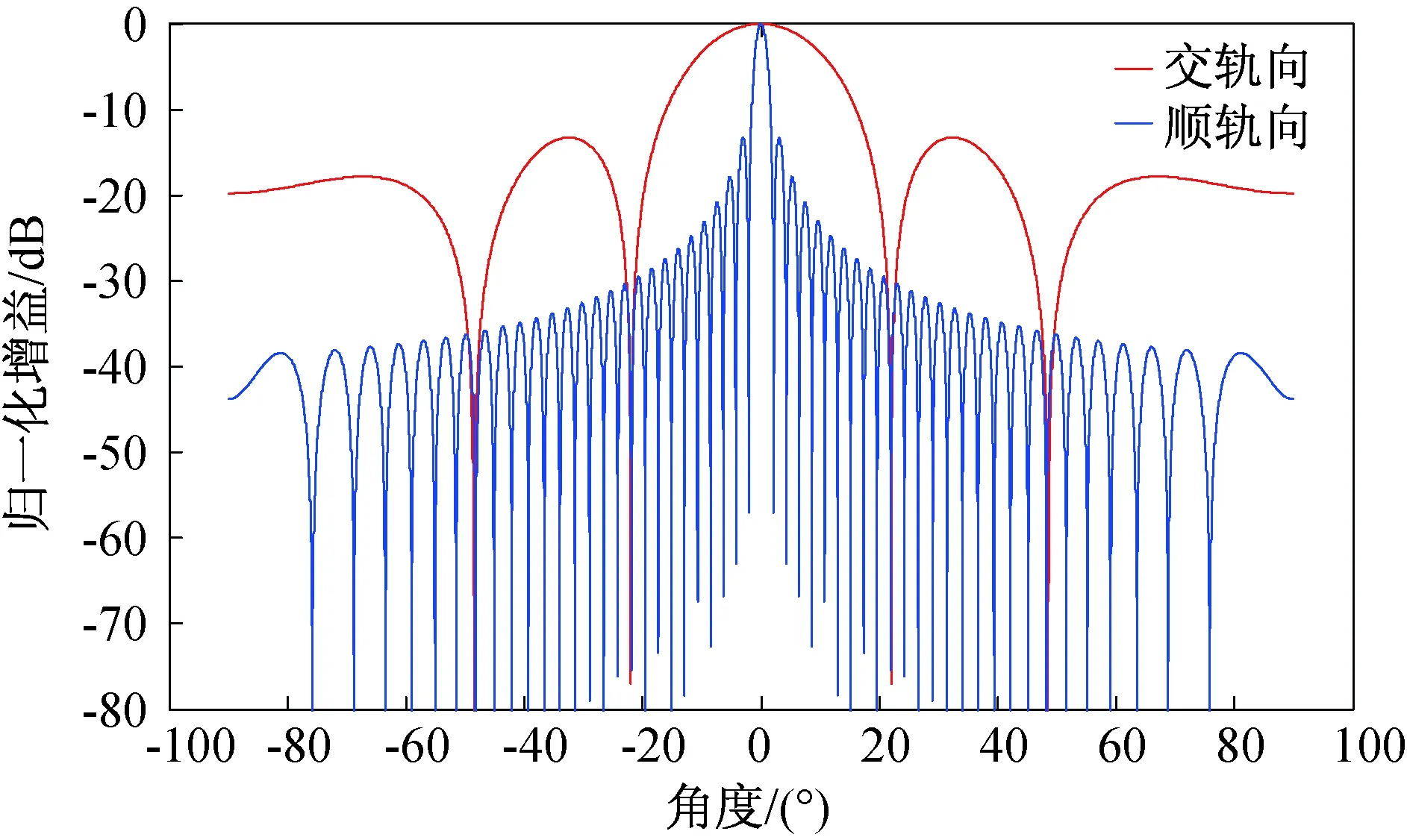
图5 顺轨接收天线方向图Fig.5 Along-track receiving antenna pattern
1.2 雷达数字子系统
雷达数字子系统由监控定时器、DBF数字接收机、雷达配电器组成。其中:DBF数字接收机主要实现数据采集、预处理、DBF实时处理及存储等功能,由采集处理模块、数据存储模块、通信接口模块、主机模块和电源模块组成。
该验证系统在顺轨干涉模式下采用4通道DBF-SCORE技术。为了降低输出的数据率,需要实时进行DBF处理。为满足该需求,数字接收机选用Xilinx Virtex-6系列FPGA,将所有的功能模块集中在单片FPGA中实现,完成所有高速数据I/O接口和外部芯片的控制,配合PCIE接口及主机平台协同完成高达3.2 GBit/s的持续数据传输,并完成数据实时信号处理。
1.3 稳定平台
根据系统干涉测量性能仿真要求,稳定平台及导航系统应满足姿态测量精度0.01°、位置精度0.05 m的要求。
高质量的SAR成像是高精度干涉测量的前提,该验证系统选用徕卡PAV80陀螺稳定座架,以保证天线波束指向的稳定性,减小波束指向不稳定对成像质量的影响,其垂直于偏流方向的稳定精度均优于0.02°(RMS),可以很好地实现雷达波束的高稳定度控制。同时,为了降低系统误差对干涉测量结果的影响,稳定平台集成了POS AV610高精度惯性导航系统,实时记录定位定向数据并经过高效率软件处理后,获得了高精度的定位定向数据,后处理定位精度为0.05 m,姿态精度为0.008°。
2 系统参数及干涉测量精度仿真分析
为了验证该系统设计及信号处理方法,开展双模式干涉测量的机载飞行试验,系统的基本工作模式为条带模式。飞行试验的主要参数见表1。对于机载飞行试验,模糊度指标很容易满足要求。因此,在SAR系统参数设计时重点针对分辨率和等效噪声系数(NESZ)指标开展分析。其中:分辨率主要影响干涉测量数据的网格大小;NESZ指标主要影响系统信噪比,进而影响干涉处理2幅图像之间的相干性。

表1 系统参数Tab.1 System parameters
2.1 交轨干涉模式
根据法国太空研究中心的近底视Ka波段数据采集实验结果可得:当入射角≤15°时,Ka波段的水面后向散射系数优于0 dB。该系统交轨干涉模式下的最大工作视角为13.3°,因此对应的目标后向散射系数优于0 dB,当系统NESZ优于-10 dB时,可保证系统获得足够高的信噪比和较好的干涉测量结果。交轨干涉模式工作视角范围内的NESZ仿真结果如图6(a)所示。该系统在交轨干涉模式下的方位分辨率优于0.3 m。地距分辨率取决于发射信号带宽和系统工作视角,该系统在工作视角范围内的地距分辨率仿真结果如图6(b)所示。
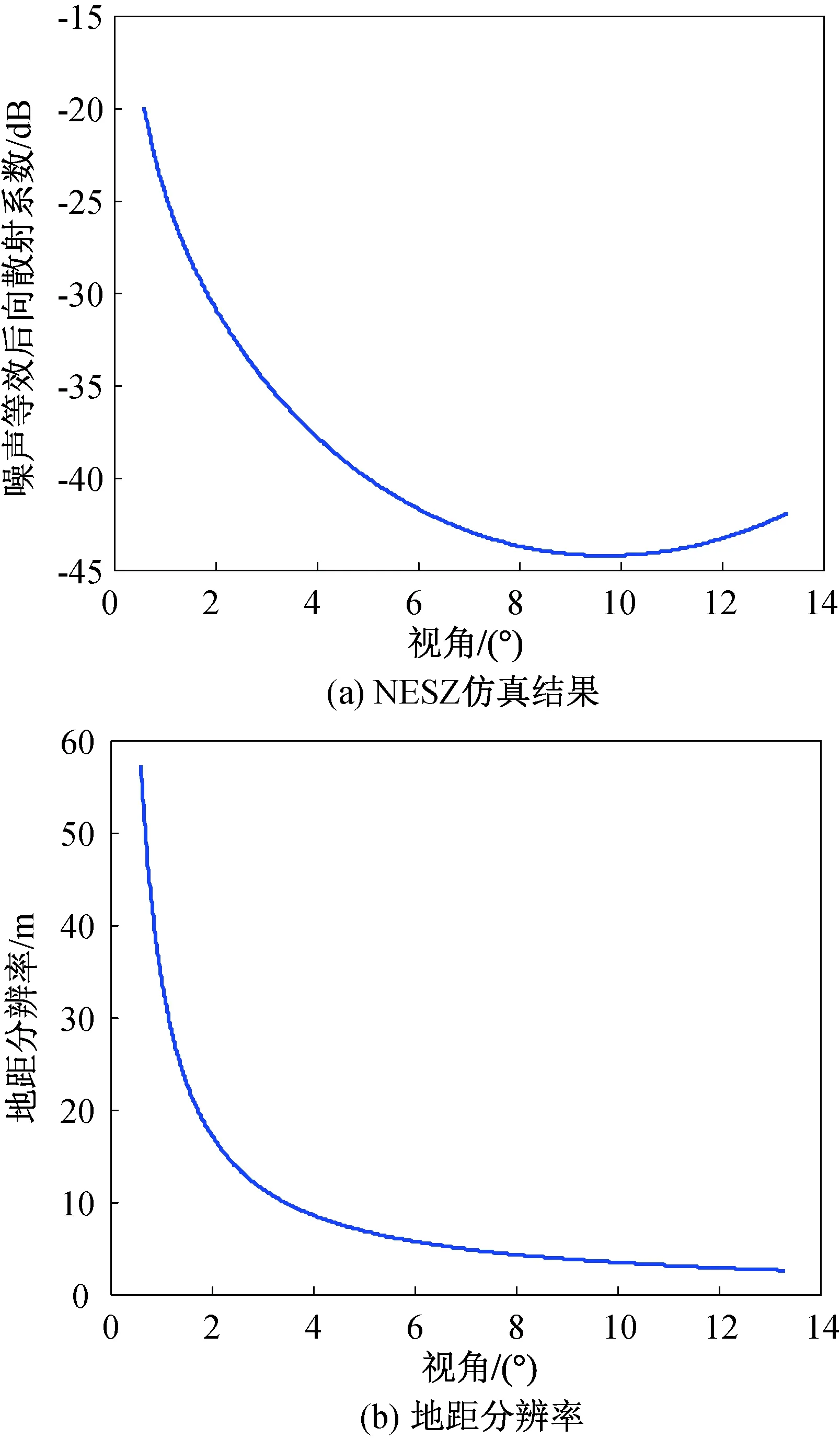
图6 系统参数仿真结果Fig.6 System parameter simulation results
根据干涉测高原理,直接影响干涉高程测量精度的因素有5个:飞行高度H、雷达至目标点的作用距离R、基线长度B、基线倾角α和干涉相位φ[5]。在机载飞行试验中,H由GPS测量信息得到;R通过雷达回波延时测得;B,α通过基线测量系统或间接估计所得;φ由2幅SAR图像干涉处理获取。假设各因素不相关,InSAR测高的总均方根误差(高程测量的绝对精度)可表示为

(1)
式中:σH,σR,σB,σα,σφ分别为飞行高度误差、斜距误差、基线长度误差、基线倾角误差、干涉相位误差。其中,前4项误差可根据系统所采用的导航系统及稳定平台精度初步确定,基于相应参数分析其对应的高程测量误差,并可在处理过程中进行校正,以进一步降低其对最终高程测量结果的影响。σφ主要取决于主辅图像的相干系数和处理过程中选取的多视数,影响主辅图像相干系数的因素主要包括体散射去相干、时间去相干、多普勒去相干、基线去相干、模糊去相干和信噪比去相干。由于该系统采用单次航过单平台干涉测量,因此体散射去相干和时间去相干的影响可以忽略不计。
基于以上分析,结合该系统相应工作参数,对各项误差导致的高程测量误差和绝对高程测量精度进行了仿真分析,结果如图7所示。在100 m网格条件下,绝对高程测量精度可达到0.5 m。分析各误差因素的测高误差贡献量,结果发现:干涉相位误差和基线误差是影响高程测量精度的主要因素。
基于以上仿真分析,表2给出了交轨干涉模式下的系统参数及性能。
2.2 顺轨干涉模式
根据顺轨测速原理,目标距离向速度与干涉相位之间的关系为
(2)
式中:λ为波长;φ为干涉相位;vp为平台速度;B为顺轨干涉基线;θ为入射角。由式(2)可见,θ越大,目标距离向速度的测量精度越高。综合考虑系统代价与测速精度,该验证系统选取的工作视角为15.6°~28.3°。
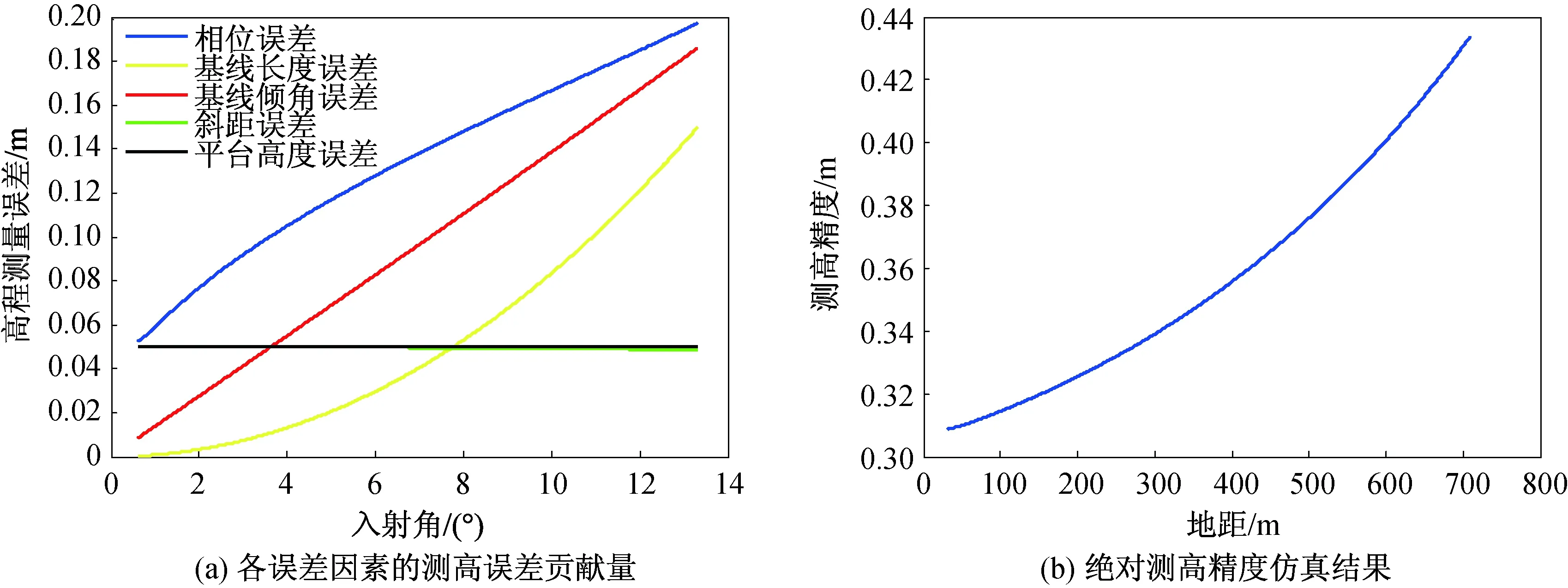
图7 测高误差贡献量与绝对测高精度的仿真结果Fig.7 Simulation results of height error contribution and absolute height error
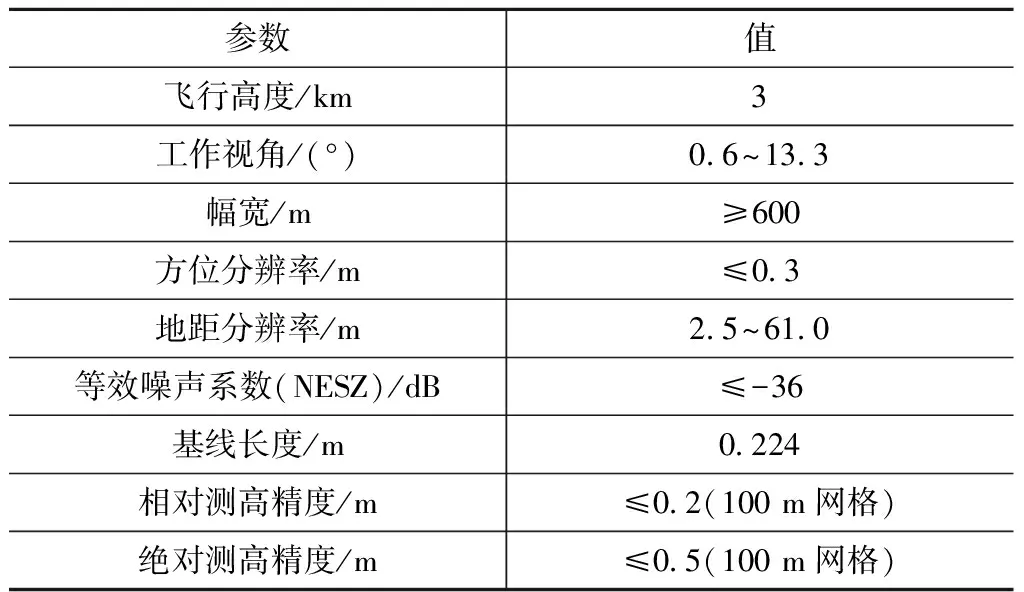
表2 交轨干涉模式系统性能参数Tab.2 System performance of XTI mode
由雷达后向散射统计数据可得:当θ≤30°时,Ka波段水面后向散射系数优于-26 dB。为保证系统信噪比,该系统在顺轨干涉模式下的NESZ需优于-34 dB[11]。
经过天线设计,该系统在顺轨干涉模式下的方位分辨率优于0.2 m,系统参数仿真结果如图8所示。地距分辨率仿真结果如图8(a)所示。根据系统参数仿真得到的NESZ如图8(b)所示。
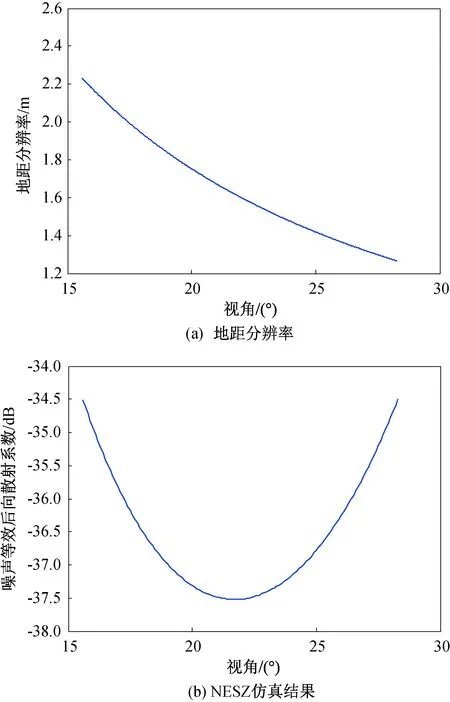
图8 系统参数仿真结果Fig.8 System parameter simulation results
根据系统天线设计,顺轨干涉模式下的基线长度为0.225 m,据此仿真得到10 m网格条件下的目标速度测量精度,如图9所示。由仿真结果可以发现,由于Ka波段的波长短,系统在基线较短、工作视角较小的情况下仍能获得0.1 m/s的测速精度。
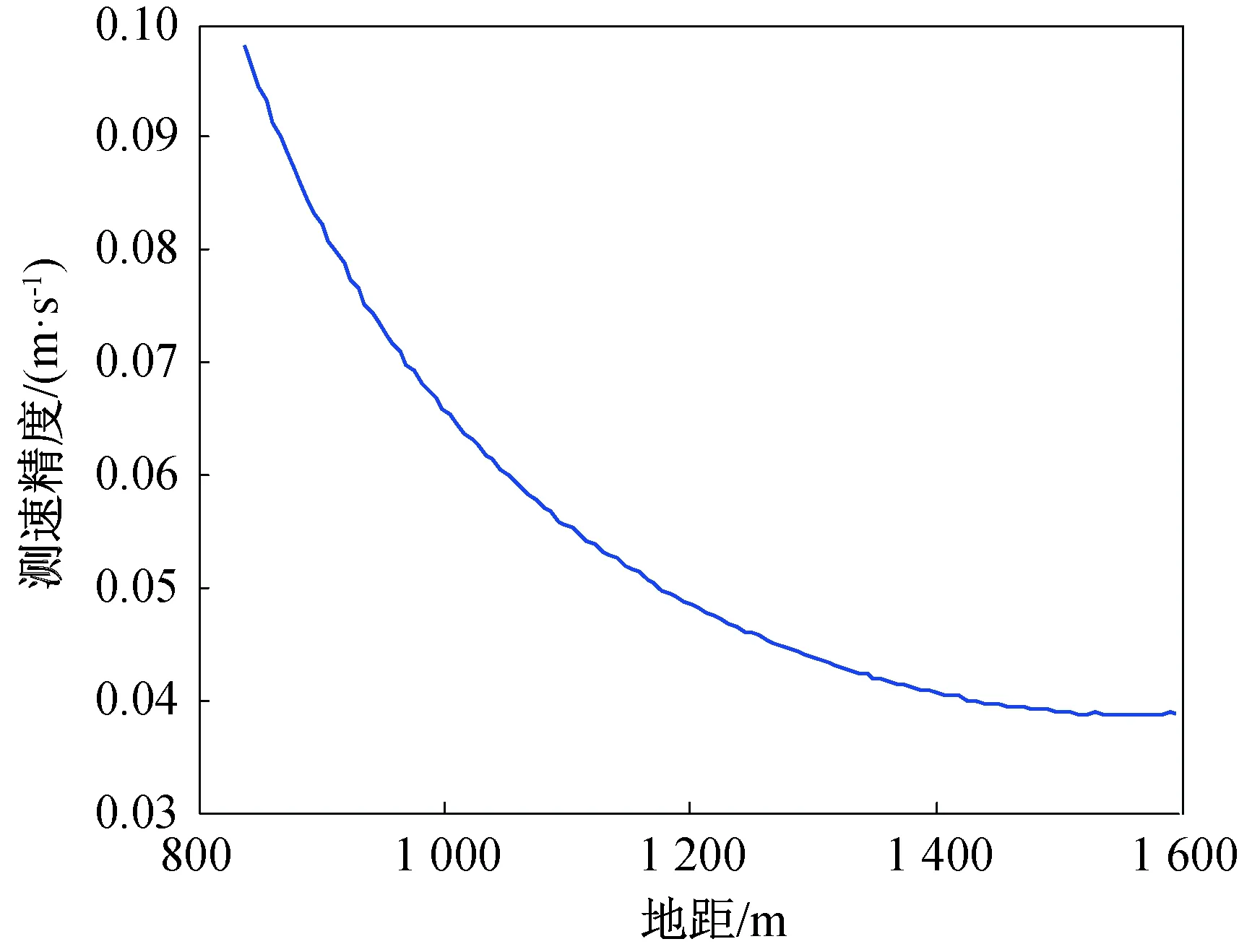
图9 测速精度仿真结果Fig.9 Simulation results of velocity measurement accuracy
基于以上仿真分析,给出了顺轨干涉模式下的系统参数及性能,见表3。
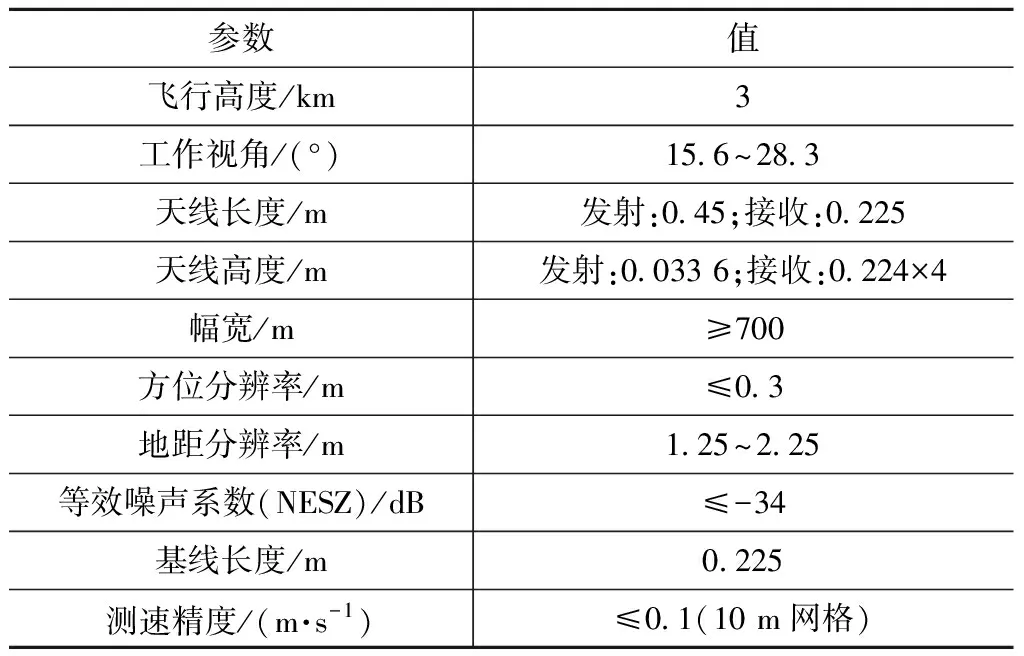
表3 顺轨干涉模式系统性能参数Tab.3 System performance of ATI mode
4 结束语
高精度、高效率测量已成为现代遥感的重要发展方向。传统低波段干涉SAR系统所需基线长,难以同时实现交轨干涉测高和顺轨干涉测速,不利于高效率干涉测量。Ka波段波长较短,对干涉相位敏感,能以较短的基线获得高精度的干涉测量结果。为此,对机载Ka波段双模式干涉SAR系统开展了研究,对该验证系统进行了介绍,仿真分析了系统参数与干涉测量精度,验证了Ka波段双模式干涉SAR系统的可行性,为后续的飞行试验干涉测量性能提供了理论分析依据。
由于目前研究主要基于干涉理论,缺乏相应实测数据的支撑,因此后续将根据飞行试验获取的实测数据对系统仿真与设计进行进一步验证。
猜你喜欢
导航定位学报(2022年4期)2022-08-16
九江学院学报(自然科学版)(2022年2期)2022-07-02
成都信息工程大学学报(2022年2期)2022-06-14
航天返回与遥感(2022年2期)2022-05-12
波谱学杂志(2022年1期)2022-03-15
导航定位学报(2021年5期)2021-10-13
华北理工大学学报(自然科学版)(2021年3期)2021-07-03
导航定位学报(2019年2期)2019-06-06
舰船电子对抗(2019年6期)2019-04-27
移动通信(2019年2期)2019-03-27
