
基于微波光子技术的实时高分辨雷达成像
2019-01-17 01:06潘时龙张方正叶星炜高彬栋郭清水
上海航天 2018年6期
潘时龙,张方正,叶星炜,高彬栋,郭清水
(南京航空航天大学 雷达成像与微波光子技术教育部重点实验室,江苏 南京 210016)
0 引言
雷达成像是利用微波毫米波照射目标,并根据回波计算得到目标微波像的一种先进技术。利用微波毫米波频段电磁波对雨、雪、烟和雾霾的穿透性,以及雷达的主动探测工作模式,雷达成像已在航天测控、遥感和战场侦查等方面取得了广泛的应用[1]。随着无人驾驶、快速安检、精确制导等技术的发展,人们对成像分辨率和实时性要求不断提升,传统电子雷达遇到了巨大挑战。一方面,由于雷达距离向分辨率与信号带宽之间成反比关系,高分辨成像所需的厘米级或亚厘米级分辨率需要雷达系统产生带宽达数吉赫兹甚至数十吉赫兹的微波毫米波信号,且所产生的宽带信号需要具有相参性。另一方面,为提升雷达成像的实时性,并减轻后端数字信号处理系统的处理压力与功耗,雷达收发机需要实现对大带宽微波信号的模拟域实时处理。以上两方面需求对传统的基于纯电子技术的雷达收发机提出了巨大挑战。此外,为了提升雷达成像的方位向/角向分辨率,在合成孔径雷达(SAR)或逆合成孔径雷达(ISAR)技术之外,多输入多输出(MIMO)技术也被引入雷达成像系统中。这表明:多路正交宽带信号的产生与处理需要在多个通道并行完成。因此,雷达成像系统迫切需要一种新型技术来构建多通道、大带宽收发信机,以适应实时高分辨微波毫米波成像的发展需求。
近年来取得广泛关注的微波光子技术,可借助光子学手段实现微波或射频信号的产生、传输及处理等功能,具有高频、宽带、体积小、抗电磁干扰等诸多优势[2-4],被认为是突破传统电子系统频率与带宽限制的有效手段。经过几十年的发展,微波光子技术已经在超低相位噪声微波源、宽带微波信号的产生、幅度相位延时控制、上下变频、低损耗稳相传输、大带宽模拟-数字转换等方面显示出了明显优势,并逐步成为先进雷达系统发展的重要技术途径。目前,研究人员已提出并验证了许多基于微波光子技术的雷达信号产生与处理方案[5-8],并构建了若干微波光子雷达的系统方案[9-13],研究结果充分证明了微波光子技术在雷达应用中的巨大潜力。
本文介绍了一种新的具备高分辨率探测与实时信号处理能力的微波光子雷达架构,详细阐述其系统构成、原理及特点,并展示其在实时高分辨率微波成像上的应用。以此为基础,本文还将介绍微波光子雷达在MIMO体制下的改进与优化。
1 微波光子雷达系统
一种典型的微波光子雷达系统如图1所示[10]。其发射机利用微波光子倍频技术产生宽带线性调频信号,接收机利用微波光子混频技术实现宽带雷达回波去斜处理。半导体激光器(LD)发出的直流光被送入一个平行马赫-曾德尔调制器(DPMZM)。由低速电信号发生器产生的中频线性调频信号(IF-LFM)经过一个90°电桥后,得到的两路信号分别加载于双平行马赫-曾德尔调制器的两个射频输入口。通过设置双平行马赫-曾德尔调制器的偏置电压并控制驱动信号的幅度,经过双平行马赫-曾德尔调制器调制的光信号仅存在±2阶调制边带[14]。此信号经过光耦合器(OC)分为两路,其中一路经过宽带光电探测器(PD1)得到线性调频信号(LFM),其载波与带宽均为中频线性调频信号的4倍,即实现了对中频线性调频信号的四倍频操作。得到的线性调频信号由电放大器(EA1)进行功率放大,随后经过发射天线发射至探测空间。经目标反射后的雷达回波信号由接收天线收集,经过低噪声放大器放大后用于驱动电光相位调制器(PM)对光耦合器输出的另一路信号进行相位调制。此过程中,输入相位调制器的光信号包含两个扫频光载波,经过雷达回波信号调制后,会在两个初始光载波附近产生新的调制边带。产生的调制边带与初始载波的频率差取决于雷达回波延时量,因此使用光带通滤波器(OBPF)滤出一个初始光载波及其附近的调制边带,经过光电探测器(PD2)拍频后,得到电信号的频率正比于雷达回波信号延时,即正比于目标与雷达间的距离[15]。此过程利用微波光子混频实现宽带雷达回波信号的去斜处理。经过去斜处理后,接收机仅需采用低速模数转换器,即可进行实时信号处理。

图1 一种典型微波光子雷达的原理框图Fig.1 Schematic diagram of proposed microwave photonics-based radar
此雷达能克服电子器件在工作带宽方面的限制,在保证超高分辨率的同时实现实时信号处理。基于以上原理,成功构建了工作带宽为8 GHz(18~26 GHz)的K波段雷达样机及工作带宽为12 GHz(28~40 GHz)的Ka波段雷达样机[15-16]。其中Ka波段雷达的实测分辨率高达1.3 cm,如图2所示。实验中,待测目标为2个三角形角反射器(2个目标之间的摆放距离为1.3 cm,测试结果为1.4 cm),其与雷达天线间的距离约为0.8 m。
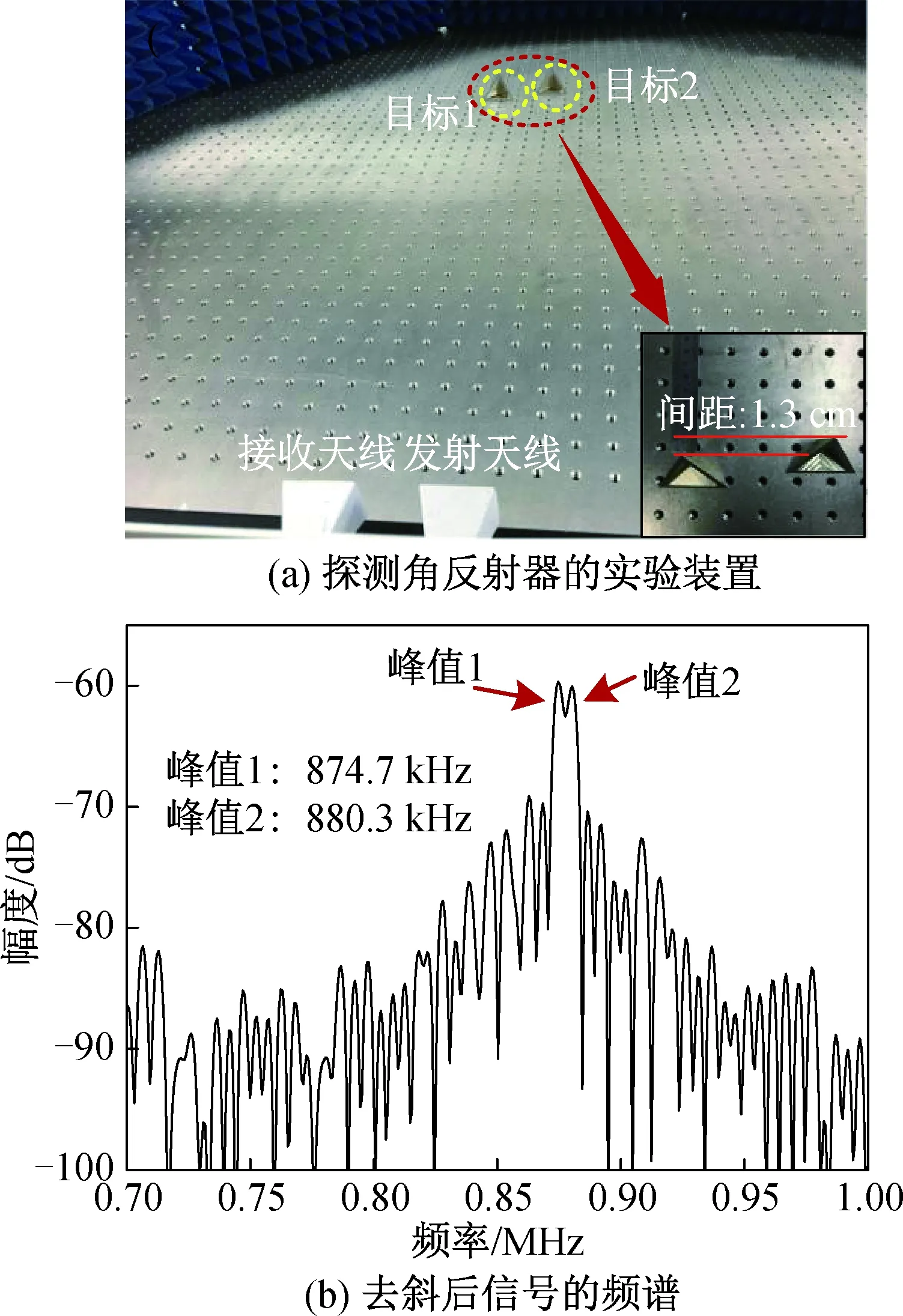
图2 探测角反射器的实验装置及去斜后信号的频谱Fig.2 Experimental setup for detecting angular reflector and frequency spectrum of de-chirped signals
2 实时高分辨ISAR成像
利用构建的微波光子雷达样机进行实时高分辨ISAR成像实验。利用K波段雷达(带宽8 GHz)进行ISAR成像的结果如图3所示。实验中探测目标是由若干2 cm×2 cm×2 cm角反射器分别摆放而成的字母“N”“U”“A”“A”。图3(a)为实验中目标摆放的实物图,摆放面板以约30°倾角安装在转速为360 (°)/s的转台上,转台与雷达天线间的距离约为1.2 m。图3(b)为雷达样机的成像结果,成像结果可以清晰地显示出“N”“U”“A”“A”四个字母。

图3 成像实验目标实物与雷达样机成像结果Fig.3 Photographs of targets and imaging results of prototype radar in experiment
为进一步验证微波光子雷达的实时高分辨成像特性,利用构建的K波段(带宽8 GHz)雷达样机,对叶片裹有锡箔纸的1台五叶小风扇进行ISAR成像实验。图4(a)为小风扇的静态图,每个扇叶的长度和宽度分别为16 cm和6 cm。成像实验中,雷达天线与目标风扇间的距离为2.35 m,所用转台在水平面内以2 (°)/ms 的角速度旋转。经微波光子去斜处理后,回波信号中目标对应的频谱分量位于26 MHz附近。该信号以100 MSa/s的速率进行模数转换。总时长为100 ms的信号得以存储,其中每一帧图像对应的相参累积时间为10 ms,对应的成像速率为100 帧/s。图4(b)~4(d)分别为第1帧、第2帧与第5帧的成像结果。以上成像结果的二维分辨率优于2 cm×2 cm,5个叶片可以清晰地加以区分。考虑到目前的数字雷达接收机已经能对采样率为100 MSa/s的数据流进行实时处理,快速甚至实时ISAR成像可在搭建的微波光子雷达样机的基础上实现。若通过对雷达样机的简单调节使LFM 信号的啁啾率减小,去斜后信号的频率可进一步降低,这将减小实时成像的难度。
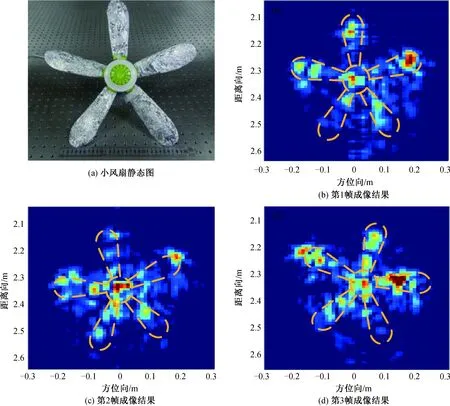
图4 实时高分辨ISAR成像实验的成像目标与成像结果Fig.4 Imaging target and results in imaging experiment based on real-time high-resolution ISAR

图5 外场ISAR成像实验系统及多帧成像结果Fig.5 Setup and imaging results of prototype ISAR in field experiment
利用构建的K波段微波光子雷达样机(带宽8 GHz),进一步对非合作目标进行外场ISAR成像实验[17],结果如图5所示。此实验中,成像目标为低空飞行的小型无人机,其机身长150 cm,翼展为180 cm,机翼宽度为20 cm。进行ISAR图像的计算重构时,每一帧图像的相参累积时间为40 ms,对应的多普勒频率分辨率为25 Hz。图5中4帧连续的图像由总时宽为160 ms的数据计算得到。从图5可看出,无人机与雷达天线间的距离约为17 m。无人机的运动可通过4帧图像中主要部分对应的多普勒频率,即方位向坐标的变化得到证实。实验中ISAR成像速率高达25 帧/s,这证明所构建的微波光子雷达在实时高分辨雷达成像实际应用中的可行性。
此外,本文构建了Ka波段微波光子成像雷达(带宽12 GHz),并对小型飞机模型进行了ISAR转台成像实验[16]。实验中转台转速为360 (°)/s,飞机模型机身长为29.2 cm,翼展为32 cm。雷达接收机对去斜信号的采样率为2.5 MSa/s,进行ISAR成像时的相参累积时间为200 ms。成像结果清晰地显示出飞机模型的轮廓。
3 微波光子MIMO雷达成像
基于以上微波光子雷达架构,本文提出了一种MIMO微波光子雷达系统,目的是利用空间采样代替时间采样,能在相同的累积时间内获得更高的方位向分辨率[18]。微波光子MIMO雷达系统结构如图6所示。图中:OC为光耦合器; WDM为波分复用器; EDFA为掺铒光纤放大器; PD为光电探测器; EA为电放大器; PA为功率放大器; LNA为低噪声放大器; MZM为马赫-曾德尔调制器; LPF为电低通滤波器; ADC为模数转换器。
该MIMO雷达由M个发射机和N个接收机基于波分复用结构组合而成。其中M个激光器提供不同中心波长的激光作为光源,分别送入M个DPMZM中。利用低速的任意波形发生器产生M个带宽和啁啾率相同但中心频率不同的中频线性调频信号,分别驱动M个DPMZM,并调节DPMZM的偏压使其工作在四倍频模式。M个DPMZM输出的光信号通过波分复用器(WDM)合并为一路,并送入掺铒光纤放大器(EDFA)中进行放大。放大后的光信号经过光耦合器分成两路,上路送入宽带光电探测器中完成光电转换,下路则经过光纤传输后送入接收机作为参考信号。上路光信号经光电探测器拍频后产生的电信号经过电放大器放大后分成M个分别送入不同中心频率的电带通滤波器中,产生M个带宽相同、中心频率不同的线性调频信号。最后,这些线性调频信号经过功率放大后分别由M个发射天线发射,被探测目标反射后由N根接收天线接收。每个接收天线接收到回波信号后,在接收机中对其进行去斜处理、多路分离和数字采样,获得M个数字信号。因为有N根接收天线,所以最终可以得到M×N个数字信号。在该MIMO雷达系统的每个接收机中,为了确保多通道的去斜信号能被无干扰地分离出来,发射的M个线性调频信号的频率范围应该满足以下条件:1)相邻通道线性调频信号的起始频率间的差值应远大于去斜后信号的频率值;2)发射信号的瞬时频率值应大于相邻通道间线性调频信号的初始频率差值。由于去斜后的信号频率一般都很低,对宽带雷达系统来说上述两个条件都很容易满足。
为验证所提出的微波光子MIMO雷达系统的可行性,搭建了一个2×2 MIMO雷达系统,并进行了目标定位实验。如图7(a)所示,2根发射天线 (T1和T2) 分别分布在 (0,0) 和 (20 cm,0)处,2根接收天线(R1和R2) 分别分布在 (90 cm,0)和 (110 cm,0)处。探测目标是一个尺寸为6 cm×4 cm的金属平板 (T),目标摆放在距天线阵列2 m左右的任意位置 (x,y),使目标到天线的距离远大于两个发射(接收)天线的间距。进行3组测量,测量结果如图7(b) 所示。从图中可看到,利用该2×2 MIMO雷达系统测试得到的目标位置和实际目标位置十分接近,3组结果的误差都在5 cm内。

图7 2×2 MIMO雷达系统天线阵列与探测目标坐标位置分布与目标定位测试结果Fig.7 Positions of antenna array and detected target and experimental results obtained with 2×2 MIMO radar
进一步对该MIMO雷达系统的ISAR成像功能进行仿真研究。仿真中MIMO雷达系统工作在30~40 GHz频段内,每个发射信号都是带宽为3 GHz、重复频率为2 kHz的宽带信号。雷达系统的发射天线阵列采用文献[19]中的线性分布:接收天线阵列中相邻天线间距为5 m,发射天线阵列与接收天线阵列间距为60 m。探测目标由一系列散射点组成,与雷达的间距为1 km,以100 m/s的速度向与天线阵列平行的方向移动。仿真比较了25 ms相参累积时间内传统单发单收ISAR、2×2 MIMO-ISAR、2×4 MIMO-ISAR、3×4 MIMO-ISAR的成像结果,如图8所示。由于4种情况下发射信号的带宽相同,每个图像的距离分辨率十分接近。在图8(a)所示传统单发单收ISAR成像结果中,不同的散射点在多普勒域中无法分辨,与其他图像相比其方位向分辨率最差。在图8(b)所示2×2 MIMO-ISAR成像结果中,方位向分辨率有一定的提升;图8(c)中2×4 MIMO-ISAR成像结果的方位向分辨率更好;图8(d)中3×4 MIMO-ISAR成像效果最好,能清楚地分辨出每一个散射点。对比上述成像结果可得出:在相同的相参测量时间条件下,与传统的ISAR系统相比,MIMO-ISAR系统能得到更高的方位向分辨率,可大大提升雷达目标探测成像的性能。

图8 传统单发单收ISAR与MIMO-ISAR成像结果对比Fig.8 Imaging results obtained by conventional monostatic ISAR and MIMO-ISAR system
4 结论
本文阐述了基于微波光子倍频与混频实现宽带微波光子雷达的系统结构与基本原理,并给出了利用此雷达进行实时高分辨雷达成像的实验结果。研究结果表明:基于微波光子技术的雷达与传统电子雷达相比具有明显的带宽优势,低损耗光纤分配网络与高隔离度波分复用技术也有利于构建MIMO成像雷达。微波光子技术是发展新一代具有超高分辨率与实时探测能力雷达系统的重要技术途径。
猜你喜欢
发电设备(2022年3期)2022-05-23
雷达学报(2022年1期)2022-03-05
能源工程(2021年5期)2021-11-20
科技传播(2019年24期)2019-06-15
发明与创新·大科技(2019年11期)2019-03-07
红领巾·探索(2018年12期)2018-01-26
美食堂(2017年8期)2017-08-14
百科知识(2017年3期)2017-03-17
商情(2009年1期)2009-04-27
中国美容医学(2004年3期)2004-09-17
