
W波段FMCW SAR系统实现与试验
2019-01-17 01:06孙志强潘嘉祺
上海航天 2018年6期
姜 漫,王 辉,孙志强,潘嘉祺,王 群
(1.上海航天技术研究院 毫米波遥感技术重点实验室,北京 100086;2.上海航天技术研究院 毫米波遥感技术重点实验室,上海 201109)
0 引言
合成孔径雷达(SAR)具有全天时、全天候的特点,在遥感成像方面独具优势,而调频连续波(FMCW)SAR更易实现小型化,在地理测绘、灾区评估、海面安全巡视等应用领域备受关注。与X波段和Ka波段相比,W波段波长短,成像更细腻,能更好地表现出类光学特性[1]。国内外对W波段SAR的研究也日益深入[2]。德国高频物理和雷达技术研究所研制的W波段无人机SAR系统SARape和MIRANDA,已完成了样机研制与试验。国内也有一些单位对W波段SAR进行了算法研究与样机研制,如:中国科学院电子研究所对W波段逆合成孔径雷达(ISAR)成像二维补偿方法进行了研究[3];并研制了一种高分辨率W波段SAR系统,其分辨率达到10 cm[4]。随着微波器件的发展,本文提出的W波段FMCW SAR系统具有更小的体积,能应用于轨道、无人机等多种平台,进行灾情评估、海面安全巡视和地理测绘。
本文介绍了一种W波段FMCW SAR的系统设计和样机实现。首先对系统方案和成像算法进行了介绍,然后将所设计的样机安置于上海交通大学的多功能船模拖拽水池上方滑轨进行试验。通过设置不同目标进行多组成像试验,得到有效试验数据,并利用改进的RD算法进行数据处理,最终得到理想的成像结果。经分析可知,系统的分辨率优于5 cm,这进而验证了W波段FMCW SAR的有效性。
1 W波段FMCW轨道SAR系统设计与实现
W波段FMCW轨道SAR系统方案如图1所示。该系统主要由频综接收机、发射天线、接收天线、采集存储与控制单元、二次电源、上位机组成。其中,频综接收机具体包括频率综合器、中频接收机和高频接收机[5-8]。

图1 系统方案框图Fig.1 Block diagram of system scheme of W-band FMCW rail SAR
SAR系统参数见表1。
W波段FMCW轨道SAR系统采用透镜喇叭天线。透镜喇叭天线由透镜和电磁辐射器(喇叭)构成。按照几何光学理论,处于透镜焦点处的点光源辐射出的球面波经透镜折射形成平面波。根据折射率系统不同,透镜分为双曲面介质透镜与椭圆面介质透镜。与双曲面透镜相比,椭圆面介质透镜的场分布更均匀,但因双曲面介质透镜易实现更低的副瓣,且设计制作简单,故在此选用双曲面的透镜喇叭天线。系统方位向分辨率指标为5 cm,由于方位向分辨率为天线长度的一半,天线长度(L)为10 cm。经仿真计算,喇叭口径(D)约为7.8 cm。单个天线实物如图2所示。
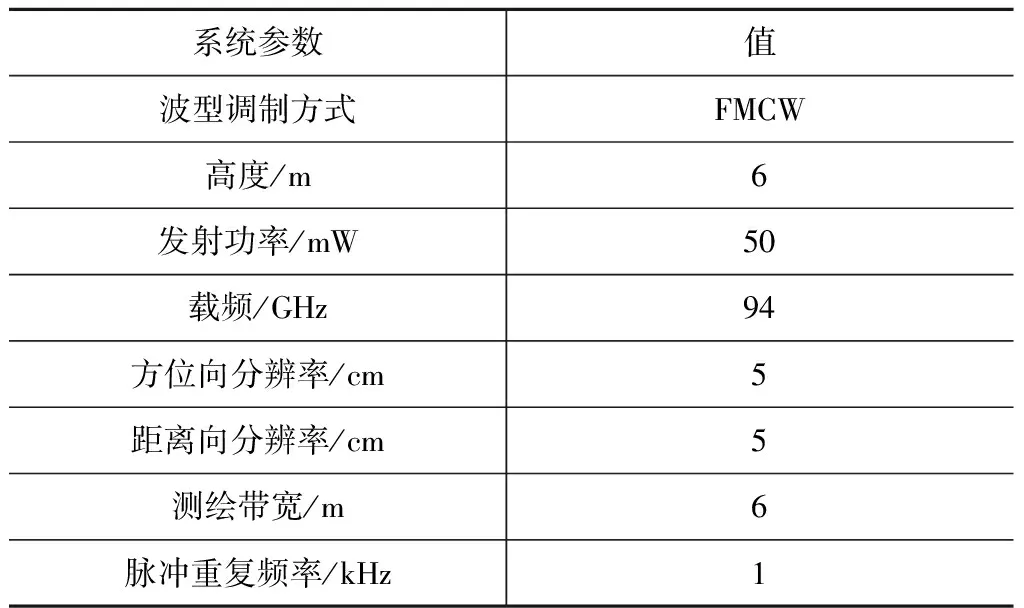
表1 系统参数Tab.1 System parameters

图2 天线实物图Fig.2 Actual antenna
频率综合器由2部分功能电路组成。一路用于产生频率为1 GHz的线性调频连续波信号(DDS信号),另一路用于产生频率为5 GHz的正弦波信号(PLL信号)。线性调频连续波由DDS产生。点频产生电路采用直接频率合成的方式实现,选用频率为100 MHz的晶振,通过倍频、滤波后得到5 GHz的信号。
采集存储与控制单元主要用于实现系统ADC采集与数据存储,以及系统性能监测与控制功能。该单元对雷达接收机输出的2路视频信号(I,Q)进行AD采样和数据处理,将处理后的采样数据打包存储到Nandflash中,通过USB接口将成像数据传给上位机进行SAR成像处理。
系统样机如图3所示。

图3 系统样机Fig.3 System prototype
2 基于滑轨的系统试验
试验在上海交通大学的多功能船模拖拽水池完成。试验现场如图4所示。

图4 试验现场图Fig.4 Test site
将W波段FMCW SAR系统安装在轨道的支架上,距离水面5.8 m。因轨道在匀速运动时仍具有很高精度,故运动误差对系统成像的影响可忽略不计。同时,在水面上设置不同目标,如小船、角反、救生圈、自行车等。系统以5 m/s的速度匀速以正/侧视方式经过水面目标并成像。
3 试验结果与分析
3.1 成像算法与试验部分结果
基于改进的RD算法对试验数据进行处理,处理流程如图5所示[9-11]。
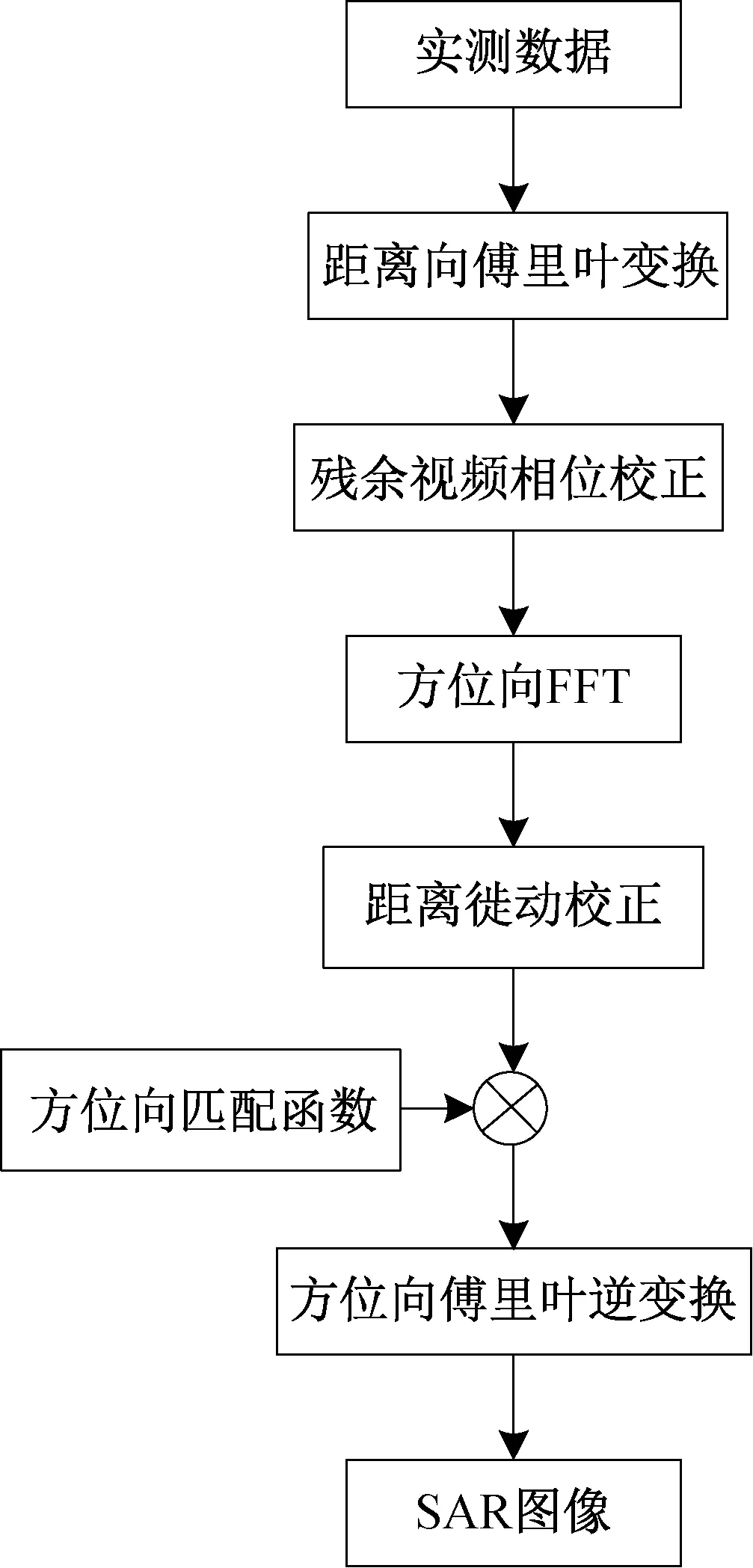
图5 改进的RD算法处理流程图Fig.5 Processing procedure of modified RD algorithm
在文献[5]中,已通过仿真验证了该算法的有效性。基于以上算法对实测数据进行初步处理,结果如图6所示。

图6 部分成像结果图Fig.6 Imaging results of some targets
3.2 结果分析
为验证系统的成像能力与成像分辨率,针对以下2组成像结果进行分析。
3.2.1 3个角反目标的2次成像结果
3个角反被放置于船上,其实际距离尺寸如图7所示。系统的速度为5 m/s。

图7 角反实物及其实际距离尺寸Fig.7 Actual corner reflectors and distance dimensions
1) 第1次测试结果
3个角反第1次SAR成像结果如图8所示。3个角反清晰可见。

图8 角反第1次成像结果Fig.8 First imaging results of corner reflectors
对3个角反进行方位向剖面图分析,如图9所示。角反1、角反2和角反3的位置点分别为(1 430,124),(1 407,127)和(1 444,128)。通过方位向的剖面图可知,每个方位向的像素等效为0.5 cm,角反1和角反2之间为23个像素,因此两者之间的距离为23×0.5 cm=11.5 cm。角反2与角反3之间为37个像素,因此两者之间的距离为37×0.5 cm=18.5 cm。成像结果与实际尺寸较为接近。
下面对系统的方位向分辨率进行定量分析。在SAR图像中,通常以一个点目标的冲击响应函数左右各降低3 dB后的脉冲宽度对应的地面上两点之间的最小距离来衡量分辨率大小,此种方法精确度高[12]。分别取3个角反的3 dB带宽,计算得到方位向分辨率分别为3.445,2.789,3.531 cm,均优于5 cm。
2) 第2次测试结果
3个角反第2次SAR成像结果如图10所示。

图10 角反第2次成像结果Fig.10 Second imaging result of corner reflectors
由成像结果可知,角反1、角反2和角反3的位置点分别为(933,123),(912,127)和(952,127)。图11为3个角反方位向幅度剖面图。

图11 3个角反方位向幅度剖面图Fig.11 Amplitude results of three corner reflectors
角反1和角反2之间为21个像素,因此两者之间的距离为21×0.5 cm=10.5 cm。角反2与角反3之间为40个像素,因此两者之间的距离为40×0.5 cm=20 cm。成像结果与实际尺寸基本相同。
同样,分别取3个角反的3 dB带宽计算系统的分辨率,结果分别为2.266,2.750,2.750 cm。可见该系统分辨率能达到2.266 cm,满足优于5 cm的分辨率指标要求。
3.2.2 救生圈的成像结果
针对图8(d)中的救生圈成像结果进行分析。救生圈的实际外径尺寸为75 cm,根据分析,救生圈的SAR图像幅度如图12所示。
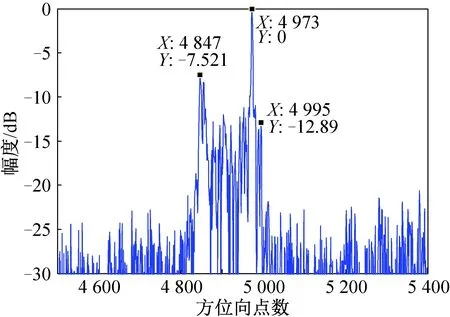
图12 救生圈成像方位向幅度剖面图Fig.12 Amplitude results of life ring
2个最高峰之间的距离为148个像素,因此外径为148×0.5 cm=74 cm,与实际尺寸基本相同。
以上2组试验结果均验证了所提出的W波段FMCW SAR系统能实现高分辨率成像。经分析,实际分辨率均优于5 cm,足以证明该系统的可行性。
4 结束语
本文基于目前的功率器件提出了一种W波段FMCW SAR系统的设计方案,实现了系统小型化与轻量化,并完成了W波段FMCW SAR的试验,得到了高分辨率成像结果,初步验证了所提出的高分辨率W波段FMCW SAR系统的可行性。但系统样机试验主要基于滑轨进行,后续可考虑利用无人机等平台进行试验,以验证系统针对不同平台的可靠性。
猜你喜欢
发明与创新(2022年28期)2022-11-22
江苏科技报·E教中国(2022年5期)2022-05-11
幼儿园(2021年12期)2021-11-06
小学生学习指导(低年级)(2019年5期)2019-04-29
中学生数理化·八年级物理人教版(2017年2期)2017-03-25
学苑创造·C版(2017年2期)2017-01-19
学苑创造·B版(2015年11期)2016-01-13
小学生时代·大嘴英语(2015年7期)2015-11-23
读写算·小学低年级(2015年9期)2015-09-18
数学大王·低年级(2015年4期)2015-07-10
