
一种适合于斜视TOPS SAR的改进PFA成像方法
2019-01-17 01:06吴玉峰张红波叶少华
上海航天 2018年6期
吴玉峰,张红波,叶少华
(中国航空工业集团公司雷华电子技术研究所,江苏 无锡 214063)
0 引言
作为扫描式合成孔径雷达(ScanSAR)的改进工作模式,循序扫描地形观测(TOPS)模式通过天线波束沿方位向的主动扫描有效克服了ScanSAR模式下成像结果的扇贝效应,解决了方位模糊比和输出信噪比不一致的问题,同时保持了ScanSAR的宽测绘带能力[1]。2007年,德国TerraSAR-X卫星首次进行了星载TOPS SAR模式实验,并成功获得了聚焦良好的成像结果[2]。欧洲新一代SAR卫星Sentinel-1也利用TOPS SAR模式来代替传统的ScanSAR模式,用于宽测绘带及超宽测绘带成像[3-4]。
由于天线波束存在沿方位向的转动,TOPS SAR回波信号的方位多普勒频谱通常会超过系统的脉冲重复频率(PRF),即回波信号在方位频域是模糊的。根据对模糊频谱处理的不同方式,TOPS SAR的成像方法可分为子孔径成像算法[5-6]、全孔径成像算法[7-8]两类。其中:子孔径成像算法中的方位信号被分为多个子孔径,保证每个子孔径信号的带宽都小于系统的脉冲重复频率(PRF),并进行距离徙动校正(RCMC)和距离压缩,然而子孔径算法不可避免会存在孔径划分、拼接、重叠部分的选择等问题,增加了信号处理的复杂性。全孔径成像算法采用two-step方法[9],先进行方位向预处理获得无模糊的信号频谱,再采用传统SAR成像方法进行RCMC和距离压缩。与子孔径成像算法相比,该算法无需进行孔径划分、拼接等操作,成像效率较高,已成为行业研究热点。
极坐标格式算法(PFA)[10-11]是一种典型的全孔径成像算法。该算法处理过程简单,二维插值可采用Chirp-Z变换实现[11],运算效率高,被广泛应用于聚束SAR的数据处理中。文献[12]对传统PFA算法进行改进,提出了一种广义PFA算法,其兼具了传统PFA算法的高效性和two-step方法对避免方位模糊的有效性,仅需要PRF略大于方位瞬时带宽,以及少量的补零操作,就能实现对滑动聚束SAR和TOPS SAR数据的聚焦。然而,该算法针对的是正侧视模式,当TOPS SAR工作于斜视时,回波信号距离向与方位向的耦合将变得异常严重,且方位扫描会带来多普勒调频斜率的方位空变问题,导致文献[12]中的算法无法使用。对于斜视聚束下的PFA算法,一般采用坐标旋转,这会导致方位采样的非均匀性[10],使方位插值变复杂。
针对上述问题,本文对广义PFA算法进行了改进,提出了一种适用于斜视TOPS SAR数据处理的PFA成像方法。该方法采用先线性走动校正,后PFA插值的步骤。线性走动校正可以大幅降低距离向与方位向的耦合性,简化RCMC,并且走动校正后,方位向采样依然均匀,因此方位向插值可采用Chirp-Z变换快速实现。针对波束扫描、走动校正引起的多普勒调频斜率的方位空变问题,利用TOPS SAR方位聚焦时的变标过程,采用方位非线性变标(ANCS)方法[13]进行统一校正,极大提高了方位向的聚焦深度,使其适用于大场景成像。
1 信号模型
二维平面内斜视TOPS SAR工作几何示意如图1所示。图中,雷达平台以速度v沿X轴匀速直线飞行,天线相位中心到场景中心的距离为Rs。数据录取过程中,雷达平台从点M运动到点N,天线波束近似绕旋转中心Orot以角速度ω匀速转动,旋转半径长度为Rrot。波束指向从θs变化到θe,中心斜视角为θ0。
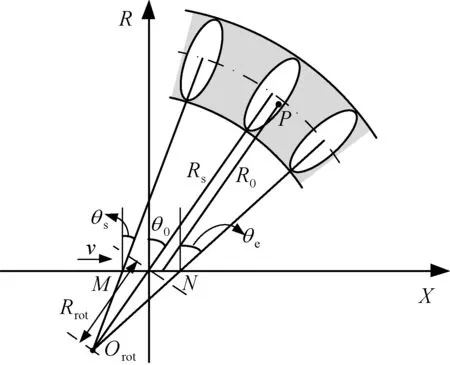
图1 斜视TOPS SAR工作几何示意Fig.1 Geometry of squinted TOPS SAR
假设雷达发射信号为线性调频(LFM)信号,则对于场景中某一点目标P(Xn,RB),其距离脉压后的回波信号在距离波数域可表示为
exp(-jKrR(ta))
(1)
R0-sinθ0(vta-Xn)+
(2)
式中:R0=RB/cosθ0,RB为点目标P到雷达航线的最近距离。由式(2)可知,距离单元徙动包括线性走动项(ta的一次项)、距离弯曲项(ta的二次项)、高次项。由于存在线性走动项,距离向与方位向的耦合变得非常明显,这无疑增加了距离单元徙动校正的难度。此外,由式(2)可知,方位多普勒调频率为
(3)
在TOPS SAR数据采集过程中,由于天线波束转动,不同方位点具有不同的中心斜视角,因此多普勒调频率沿方位向是变化的。对于正侧视模式,cos2θ0变化较小,ka的空变性可忽略;对于斜视模式,cos2θ0变化较大,ka的空变性无法忽略,否则将导致场景边沿点严重散焦。
针对上述难题,根据TOPS SAR的成像特点,对广义PFA算法进行改进,使其适用于斜视TOPS SAR的数据处理。
2 信号处理与成像方法
2.1 走动校正与PFA插值
斜视SAR存在线性走动,导致距离向与方位向之间具有较强的耦合,线性走动校正可以降低这种耦合性。因此,首先进行走动校正。由式(2)可得,线性走动校正函数为
HLRWC(Kr,ta)=exp(-jKrvsinθ0ta)
(4)
将式(4)与式(1)相乘,可得
(5)
式(5)中忽略了对成像算法设计没有影响的信号幅度。走动校正后,点目标的距离向聚焦位置将发生偏移,即
Rn=R0+Xnsinθ0
(6)
将式(6)代入式(5)可得
S2(Kr,ta)=
(7)
式(7)中第3个指数项体现了线性距离走动校正引起的方位调频率的空变性,其校正方法将在下一节讨论。完成上述距离走动校正之后,就可进行方位Deramp和二维PFA插值操作,其具体过程参考文献[13],这里不再赘述。值得注意的是,斜视TOPS SAR模式的有效速度应为vcosθ0,而不是v。
将传统斜视聚束SAR中采用的基于坐标旋转思想的PFA插值和本文线性走动校正后PFA插值进行对比。方位采样示意如图2所示。传统PFA方位向插值采用坐标旋转,即将坐标轴绕合成孔径中心点旋转中心斜视角θ0,如图2(a)所示。原本均匀的采样点A,B,C,D,E变成了非均匀的采样点A′,B′,C,D′,E′,导致方位插值无法采用Chirp-Z变换快速完成。先进行线性走动校正,相当于对回波数据沿距离向进行了人为延迟,将方位向的采样点变为A″、B″、C、D″、E″,如图2(b)所示。由图可见,方位采样点依然均匀,这大大简化了方位向的处理过程。对于线性走动校正引入的方位调频率空变性,可与斜视扫描产生的调频率空变一起校正,不会增加运算量。
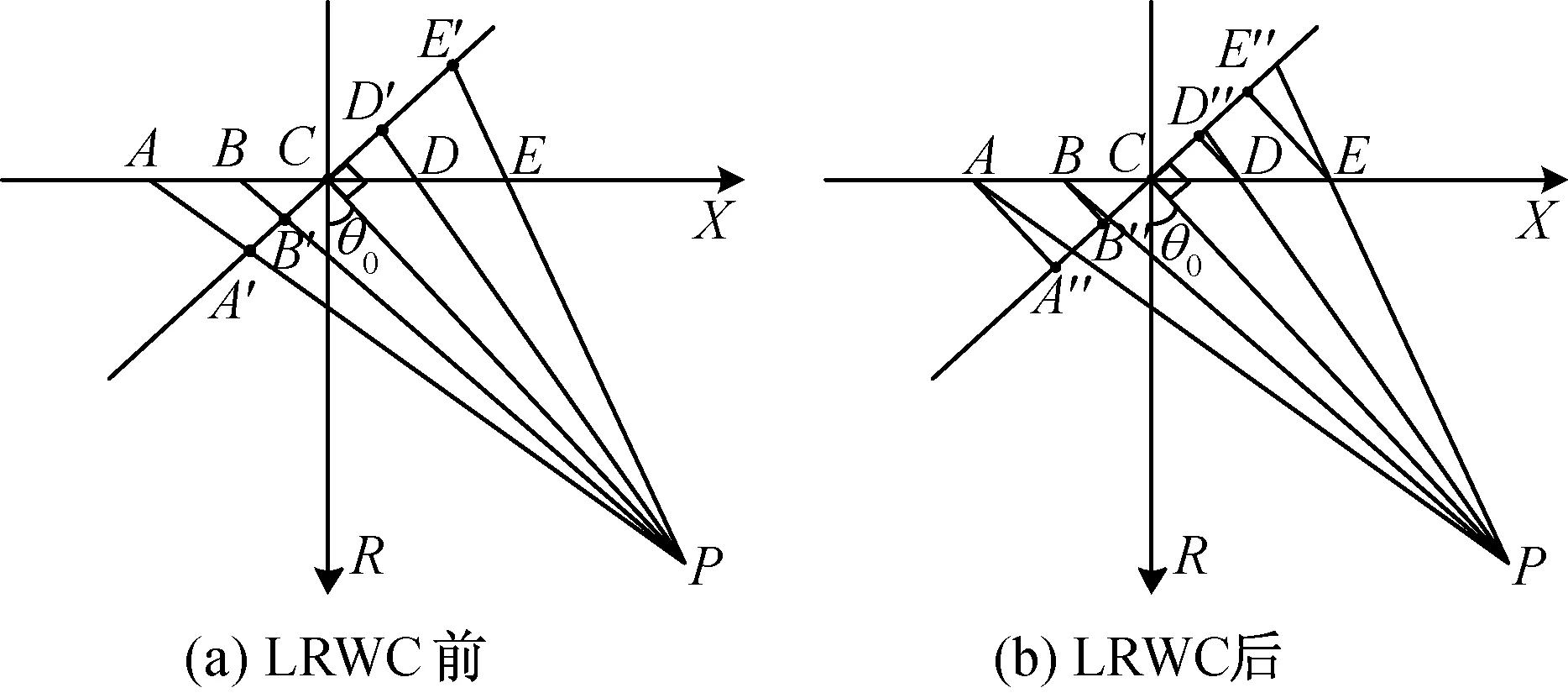
图2 LRWC前后方位向采样间隔Fig.2 Azimuth sampling interval before and after LRWC
2.2 ANCS与方位聚焦
参照文献[12]的方法,在二维插值和函数HQPT补偿后,进行距离向逆傅里叶变换完成距离向的处理,此时信号可表示为
S3(Y,Kx)=sinc(Y-Ynsinθ0)exp(-jKxXncosθ0)·

(8)
式中:Kx为方位波数;Ky0为插值后距离波数Ky的中间值;Xn,Yn为成像场景点的坐标;δ为展开量和真实斜距间的误差。式(8)最后的相位项是由LRWC处理导致的剩余多普勒调频率,与目标的方位位置有关。对于TOPS SAR,若直接对插值后的数据进行方位傅里叶变换成像,则所得图像将发生方位混叠[6,13]。为了避开方位混叠,方位变标函数被引入到方位聚焦中,其表达式为
(9)
式(9)为方位波数Kx的二次项,即变标过程中在方位向引入了1个新的调频率,这为ANCS的实现提供了必要的前提。
走动校正后,处于同一距离单元内点目标的方位多普勒调频率为
(10)
式中:θ为TOPS SAR天线波束方位向扫描引起的多普勒调频率变化值,θ=θs+ωta;Xn为线性走动校正引入的方位调频率空变,其表达式为
(11)
因此,点目标P与场景中心点处的调频率差为
Δka(θ,Xn,RB)=
ka(θ,Xn,RB)-ka(θ0,0,RB)
(12)
通过多项式拟合,Δka表示为
(13)
式中:N为采用多次项拟合的次数;An为拟合得到的第n次项的系数。根据式(13),并借鉴文献[13]的方法,通过二次积分就可得到ANCS扰动函数的相位,即
(14)
因此,扰动函数
HANCS=exp(-jφ)
(15)
将式(15)、式(9)乘到式(8)中,此时,信号的多普勒调频率已不再随目标的方位位置变化,即空变性得以消除。将所得信号转换到方位空域,即
S4(Y,X)=sinc(Y-Ynsinθ0)·
(16)
在方位空域构造相位补偿函数对式(16)进行聚焦,相位补偿函数为
(17)
式(17)补偿后,对所得结果进行方位向傅里叶变换,实现目标聚焦。需要注意的是,本文方法采用了LRWC和PFA算法,忽略了波前弯曲,所得成像结果存在几何形变,最后还需进行形变校正处理。算法流程如图3所示。图中函数Hde,HQPT,Hp的形式为[12]
jKr(Rs-Rrot))
(18)
(19)
(20)
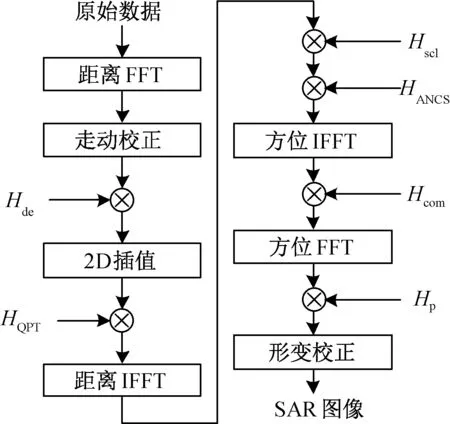
图3 所提算法流程Fig.3 Flowchart of proposed algorithm
3 仿真和实测数据处理
3.1 仿真数据处理
仿真实验中,系统工作在斜视TOPS SAR模式,仿真参数见表1,仿真场景为5×5的矩形点阵,均匀分布在6 km×6.8 km(距离向×方位向)的范围内,如图4所示。
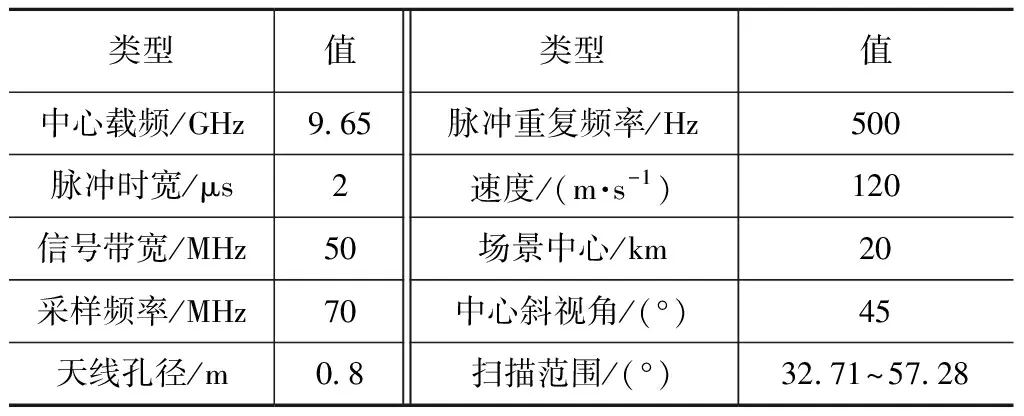
表1 仿真参数Tab.1 Simulation parameters
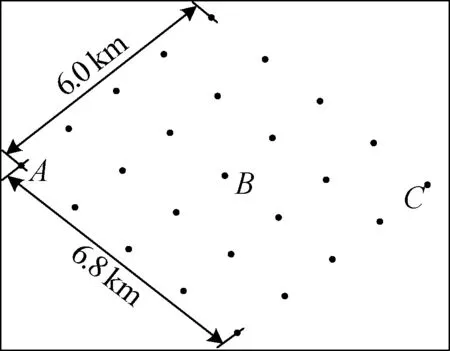
图4 仿真点目标几何示意图Fig.4 Geometry of simulated point targets
采用本文方法所得的成像结果如图5所示。图中:水平方向为方位向,垂直方向为距离向,上端表示场景近端。图5(a)为几何形变校正前的成像结果,图5(b)为几何形变校正结果。由图可见,成像结果未模糊,场景中所有点目标均聚焦良好。
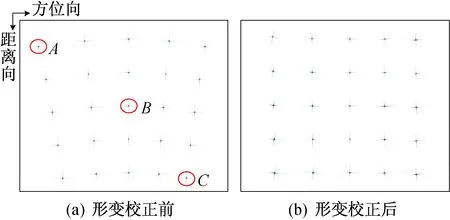
图5 仿真结果Fig.5 Simulation results
为了进一步验证成像性能,图6给出了图5(a)中A,B,C三点的等高线图。表2对该三点的成像性能参数进行了统计,其中:PSLR为峰值旁瓣比,ISLR为积分旁瓣比。由此可见,无论是场景中心点还是边沿点,成像性能均与理论值接近,这进一步表明成像效果良好。
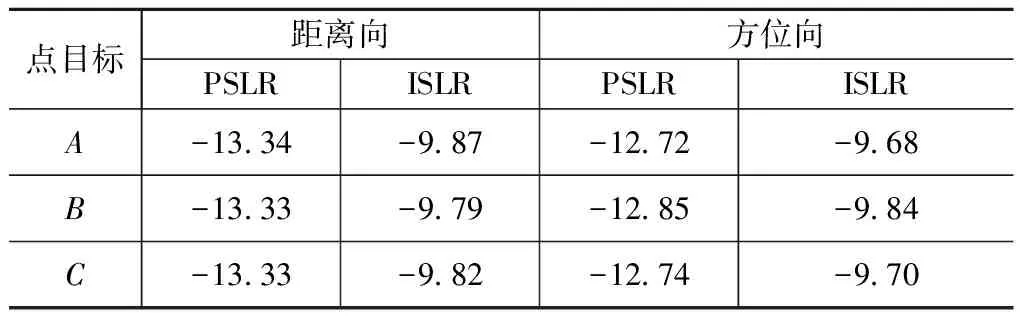
表2 点目标成像性能参数Tab.2 Imaging parameters of focused targets dB
为说明ANCS操作的必要性,图7给出了未进行ANCS处理的斜视TOPS SAR成像结果。对比图6可以看出,虽然场景中心点聚焦较好,但由于方位调频率的空变问题未解决,场景边沿点目标出现了严重散焦。结果表明:ANCS处理可有效消除调频率的方位空变性,提高方位向的聚焦深度,扩大可良好聚焦的场景范围。
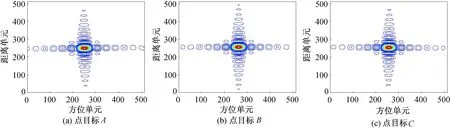
图6 点目标A-C等高线图Fig.6 Contour plots of targets A-C
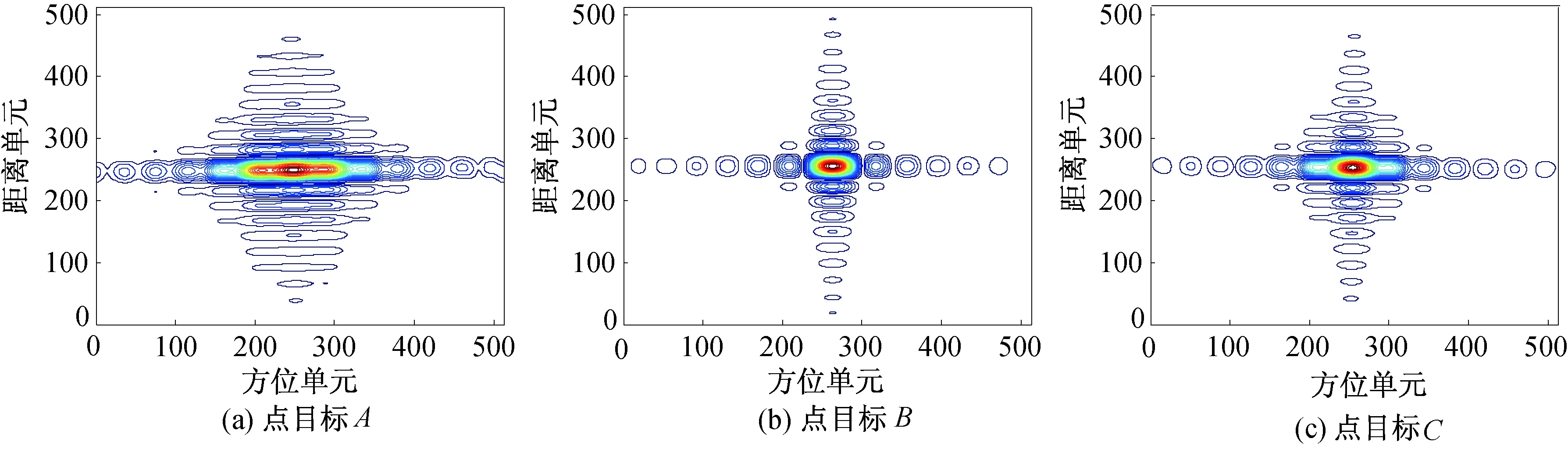
图7 未进行ANCS处理的成像结果Fig.7 Imaging results without ANCS
3.2 实测数据处理
斜视TOPS SAR原始数据为某研究所2010年采集的数据,其主要参数如下:雷达工作在Ku波段,载机速度为70 m/s,发射信号带宽为100 MHz,场景中心距离为8 km,旋转中心距离为-306 m,PRF为1 kHz,中心斜视角为46.15°,扫描范围为34.45°~57.64°。图8为采用本文改进PFA算法成像并形变校正后的结果,图像分辨率约为7.2 m×8.3 m(距离向×方位向)。图中未出现模糊现象,主要目标显示清晰,聚焦效果良好。
图8 机载斜视TOPS SAR实测数据成像结果Fig.8 Imaging result from airborne squinted TOPS SAR real data
4 结论
斜视TOPS SAR由于回波信号的距离向与方位向具有较强的耦合,波束方位扫描导致多普勒调频率空变,成像过程复杂。为此,对广义PFA算法进行了改进,利用TOPS SAR数据方位聚焦的特点,提出先线性走动校正、后PFA插值的步骤。区别于传统聚束SAR采取坐标旋转思想进行的插值,斜视TOPS SAR回波信号经过线性走动校正后,方位采样依然均匀,因此,方位向插值过程可采用Chirp-Z变换快速实现。对于波束扫描及走动校正引起的方位调频率空变问题,结合TOPS SAR聚焦流程,采用ANCS方法进行统一校正,大幅提高了方位向聚焦深度,扩大了可良好聚焦的场景范围。仿真和实测数据验证了本文方法的可行性。与常规PFA算法类似,本文方法也忽略了波前弯曲,因此今后将对波前弯曲有效补偿的方法进行重点研究。
猜你喜欢
农业工程学报(2022年10期)2022-08-22
煤炭工程(2022年7期)2022-07-21
导航定位学报(2022年3期)2022-06-10
绵阳师范学院学报(2021年2期)2021-02-04
康颐(2020年14期)2020-11-10
舰船电子对抗(2019年5期)2019-12-04
新生代(2018年16期)2018-10-21
中国纤检(2018年8期)2018-09-07
中老年健康(2016年1期)2016-03-07
计算技术与自动化(2014年1期)2014-12-12
