
基于改进合成规则的弹头目标综合识别方法*
2019-01-14 03:39邰文星丁建江刘宇驰赵志强
火力与指挥控制 2018年12期
邰文星,丁建江,刘宇驰,赵志强
(1.空军预警学院研究生管理大队,武汉 430019;2.空军预警学院,武汉 430019;3.空军装备部,北京 100034)
0 引言
随着弹道导弹目标特性的多样化和战场环境的日益复杂化,单传感器的弹头识别能力越发不能满足快速增长的作战需求,多传感器综合识别技术日益受到重视[1-5]。然而受技术体制、软硬件性能水平、部署位置和作战环境等因素的影响,多传感器对同一目标的识别结果常存在矛盾和冲突,导致综合识别结果不准确,甚至产生错误。因此,如何有效融合和决策多源识别结果,对于提高弹头目标综合识别能力至关重要。
目前,D-S 证据理论[6-7]凭借其多方面的优点[8],在多传感器目标识别领域得到了较为广泛的应用[9-12]。但在证据高度冲突时,经典D-S合成规则却无法应用。为了克服这一问题,国内外学者提出了一系列的改进方法[13-14]。总结起来,可以概括为两大类:一类是基于修正原始证据的方法[15-17],另一类是基于修改证据合成规则的方法[18-24]。
第1类方法认为D-S合成规则具有坚实的数学基础,当证据高度冲突时,应先对冲突证据进行修正,再采用D-S组合规则进行融合。此类方法的关键在于对原始证据基本概率赋值的调整,其核心在于证据源即传感器权重的确定。目前,现有方法多以证据间的冲突大小进行赋权,对传感器识别可靠性的考虑不够充分,其合理性有待进一步研究。另外,此类方法丢弃了原始证据信息,导致融合结果中的未知成分增加,聚焦能力减弱,决策难度增大。
第2类方法则认为证据合成规则存在不足,需要进行改进,且改进的关键在于冲突的管理和重新分配,即冲突概率分配系数的确定。目前,现有方法多以证据的可信度即一致性对冲突证据进行加权分配,并且取得了较为理想的效果。但是,相关方法对传感器识别可靠性的考虑同样不充分,易导致少数关键传感器的意见被忽视,使融合与决策风险增大。
尽管以上两类方法均可以合成高度冲突证据,但受弹头目标识别的复杂性和特殊性制约,在具体的应用中仍存在一定的局限性。为此,本文基于修正合成规则的观点,提出了一种基于证据可靠性和一致性对比融合的证据合成规则。实例分析证明,新的证据合成规则有效提高了弹头目标综合识别的鲁棒性与准确性,降低了决策风险。
1 D-S证据理论
根据证据理论的相关概念,Θ表示全部可能识别结果X的一个论域集合,且Θ中的全部元素都是互不相容的,则称Θ为X的识别框架。
定义1设Θ为一识别框架,如果函数m:2Θ→[0,1](2Θ为 Θ 的所有子集)满足:

式中,m(A)称为事件A的基本概率赋值函数,表示证据对A的信任程度。
定义2假定识别框架Θ下的两个证据E1和E2,其相应的基本概率赋值函数为m1和m2,焦元分别为Ai和Bj,则根据经典D-S合成规则有:

2 证据合成规则的改进
基于之前的分析,本文采用修成证据合成规则的观点,并基于冲突概率的全局分配来融合冲突证据。根据相关文献的观点,基于冲突概率全局分配的合成规则可表示为:
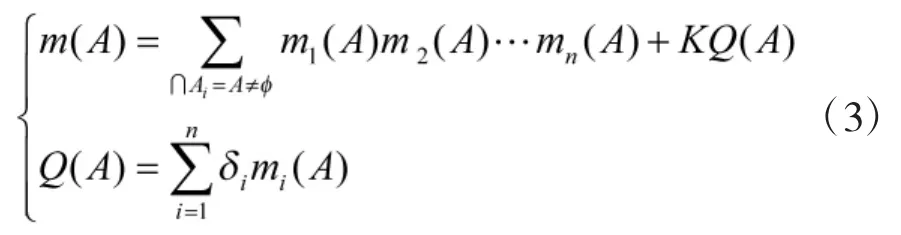
式中:A⊆Θ,Θ为识别框架;K为D-S合成规则中定义的全局冲突系数;Q(A)为证据对命题A的加权支持度,且有;δi为证据 Ei的冲突概率分配系数,体现着Ei在冲突分配中的地位。显然,δi的确定是该方法的关键,且直接影响着证据融合的结果。
在理想条件下,可假设传感器所提供的识别证据都是完全可靠的。此时,如文献[16]等的做法,以证据间的一致性大小来确定δi是可取的。因为,多数传感器同时错判的几率显然更小,少数冲突意见应该服从多数一致意见。
但在现实条件下,受目标特性、识别环境和传感器性能等多种因素的综合影响,传感器所提供的识别证据并非完全可靠,且其可靠性有高低之分。此时,若仍以证据的一致性为依据确定δi,则融合结果中将存在较大的风险。
例如:为了提高突防成功率,来袭弹道导弹通常会有针对性地释放某一波段的弹载有源干扰(压制式或欺骗式),以破坏或扰乱我方预警雷达探测效能的发挥。若恰好参与识别的雷达多工作在这一波段,那么这些雷达很可能都会受到来自弹载干扰机的主瓣干扰,并得出一致的错误识别结果。此时,若仍以证据的一致性来融合多雷达的识别证据,则大多数受干扰雷达的意见将被采纳,融合结果必然是错误的。
因此,在弹道导弹综合识别背景下,δi的确定不仅要考虑识别证据的一致性,更要考虑各个识别证据的可靠性。
设有n部传感器同时提供识别证据,其证据集为 E={E1,E2,…,En},证据 Ei的权重系数为 wi,则证据源的权重向量为:

满足 wi∈[0,1],且有。其中,权重系数wi代表证据Ei的可靠性,且与传感器的性能和具体的识别过程有关,其具体计算方法将在下一节介绍。在式(3)的基础上,本文将证据权重系数引入其中,具体如下:
第1步:求各证据的可信度R(Ei)
设E1和E2是识别框架下的两个证据,m1和m2分别为其相应的基本概率赋值函数,焦元分别为Ai和Bj,则证据E1和E2间的相似系数可以表示为[23]:
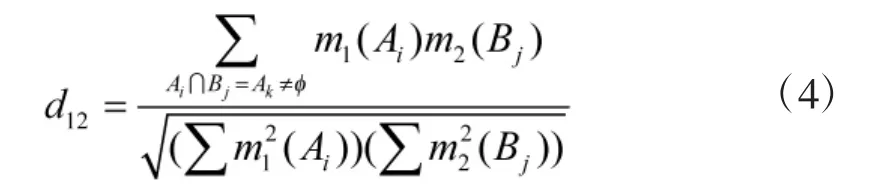
相似系数d12用来表示证据间的相似程度,且有 d12∈[0,1]。d12的值越大,表明证据间的相似程度越高。当d12=1时,表示证据E1和E2是完全相同的;当d12=0时,表示证据E1和E2是完全冲突的。
若系统收集了 E1,E2,…,En等 n 个证据,则应用式(4)可以分别计算出两两证据间的相似系数dij,并将其表示为一个相似矩阵的形式:
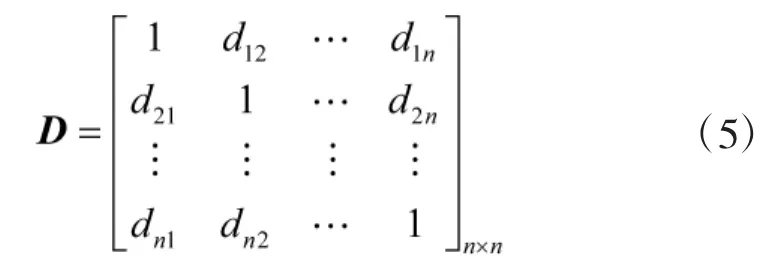
将该矩阵的每行相加,可得到各证据对证据Ei的支持度为:

若S(Ei)的值越大,则说明证据Ei与其他证据的相似程度越高,它们相互支持的程度也越高;相反,若S(Ei)的值越小,则说明证据Ei与其他证据的相似程度越低,它们互相支持的程度也越低。
进一步将S(Ei)归一化,即可得到证据Ei的可信度为:

第2步:求证据的一致性偏差ΔR(Ei)
由式(7)可知证据的平均可信度为:

因此,由式(7)和式(8)可得证据 Ei的一致性偏差为:

当ΔR(Ei)>0时,表明证据Ei得到了多数其他证据的支持,属于主流意见;当ΔR(Ei)≤0时,表明证据Ei没有得到多数其他证据的支持,属于非主流意见。
第3步:求冲突概率分配系数δi
在冲突证据的融合中,证据的可靠性即权重wi是冲突概率分配的根本依据,而证据的一致性偏差则是重要的影响因素,因此,有δi为:
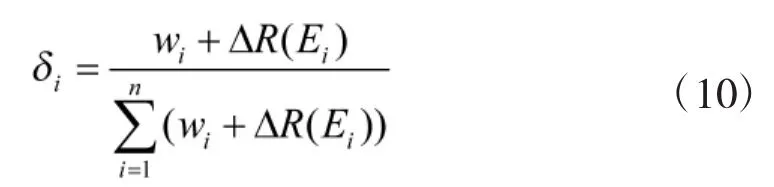
由于多数传感器同时出错的概率相对较小,所以式(10)的意义是:当ΔR(Ei)>0时,证据Ei得到了多数其他证据的支持,其可靠性相对加强,因而在冲突概率分配中占据更多的份额;当ΔR(Ei)≤0时,证据Ei没有得到多数其他证据的支持,其可靠性相对减弱,因而在冲突概率分配中的份额相对减少。
3 证据权重的确定方法
对于识别证据Ei,它是传感器固有识别能力在目标特性、识别环境和识别方法等因素综合影响下的结果。因此,应根据传感器自身的具体情况及其识别过程,对证据的可靠性进行评估和对比,从而确定证据的权重系数。
综合考虑多方面因素的影响,可建立证据可靠性综合评价的层次结构模型,如下页图1所示。
基于以上的层次结构模型,可按照以下步骤对确定证据的权重:
第1步:采用德尔菲法、相对比较法或层次分析法等主观赋权法,对各评价层次内的指标赋权。设 U={U1,U2,…,Un}为一级指标 Ui所组成的集合,为评估总指标;Ui={Ui1,Ui2,…,Uim}为一级指标 Ui下的二级指标组成的集合,则有:

图1 识别能力评价层次结构模型
其中,θ为一级指标的权重向量,θi对应Ui的权重;θi为Ui下二级指标的权重向量,且θij对应二级指标Uij的权重。
第2步:根据各传感器及识别过程的相关实际,采用9级比例标度构造方案层对指标Uij的两两判断矩阵,如表1所示。
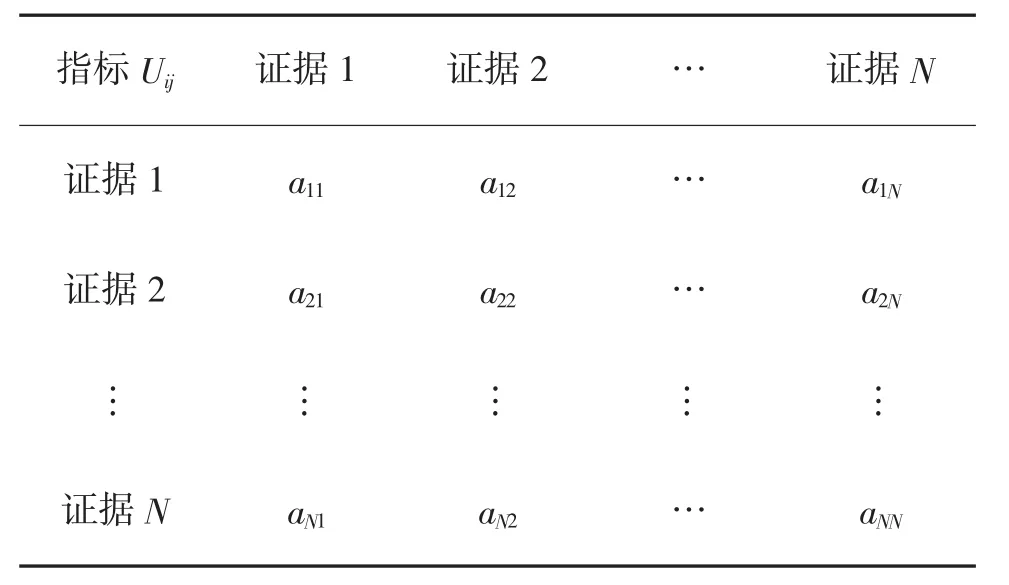
表1 各证据对指标Uij的两两比较判断矩阵
第3步:求判断矩阵的最大特征根,并进行一致性检验。若满足一致性条件,则对判断矩阵最大特征根对应的特征向量归一化,可得方案层对指标Uij的优先数向量:

其中,cijX(X=1,2,…,N)为证据 X 对指标 Uij的优先数,cijX越大,表示证据X在指标Uij上的表现越出众。同理,可得各证据对一级指标Ui的优先数矩阵为:
第4步:求各证据对一级指标Ui的综合优先数向量 ci,且有

第5步:求各证据对总指标U的综合优先数向量 c,且有


4 综合识别流程
根据本文提出的改进证据合成规则,以及相关参数的计算方法和步骤,可得弹道导弹目标的综合识别流程如图2所示。

图2 目标综合识别流程
1)各传感器在独立跟踪来袭目标并测量目标动态特性的基础上,得出对来袭目标的识别证据。
2)根据各传感器的具体性能和识别过程,对证据的可靠性进行评估。若证据的可靠性水平达到预设的门限,则可以进入到后续的融合环节中。否则,相关传感器需重新对目标展开识别。
3)计算多个证据的冲突概率系数,判断证据是否高度冲突。若否,则应用经典D-S合成规则进行融合。
4)若证据高度冲突,则基于本文提出的改进合成规则进行融合:首先,基于证据可靠性评估的相关情况确定证据的权重系数;其次,根据式(4)~式(10)计算证据的冲突概率分配系数;最后,根据式(3)和相关参数对证据进行融合。
5 实例分析
设:为了完成某次中段目标精确识别任务,调用3部反导预警雷达对弹头群内的同一重点目标展开精确识别。其中:S1为一部大型X波段相控阵雷达,S2和S3为两部中型S波段相控阵雷达。识别框架为Θ={A,B,C},其中:A表示弹头,B表示碎片,C表示诱饵。
5.1 高度冲突证据下的目标综合识别
设:识别过程中,来袭导弹释放了弹载S波段有源干扰。经过一段时间的观测,3部雷达得出了如下的识别证据:
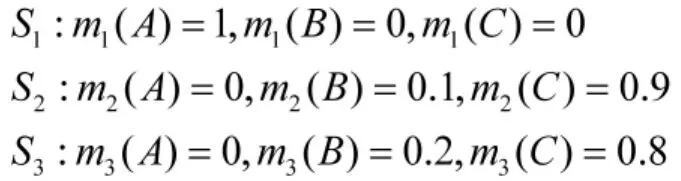
根据对各传感器性能状态及识别过程的监测情况发现:S1正常工作,S2和S3受到了有源欺骗式干扰。进一步通过证据可靠性分析与评估可得:w=[0.6,0.2,0.2]。
由于K=1,证据高度冲突。分别采用现有改进方法和本文方法对以上证据进行合成,可得相关结果如表2所示。
可以看出,现有改进方法都只考虑了证据的一致性,并采取多数一致的意见,将目标判为诱饵。而本文方法在考虑证据一致性的同时,进一步深入考虑了证据可靠性带来的影响。根据本文方法决不能轻易地将目标判为诱饵,应当进一步展开识别,从而避免了不可靠证据融合时产生的决策风险。
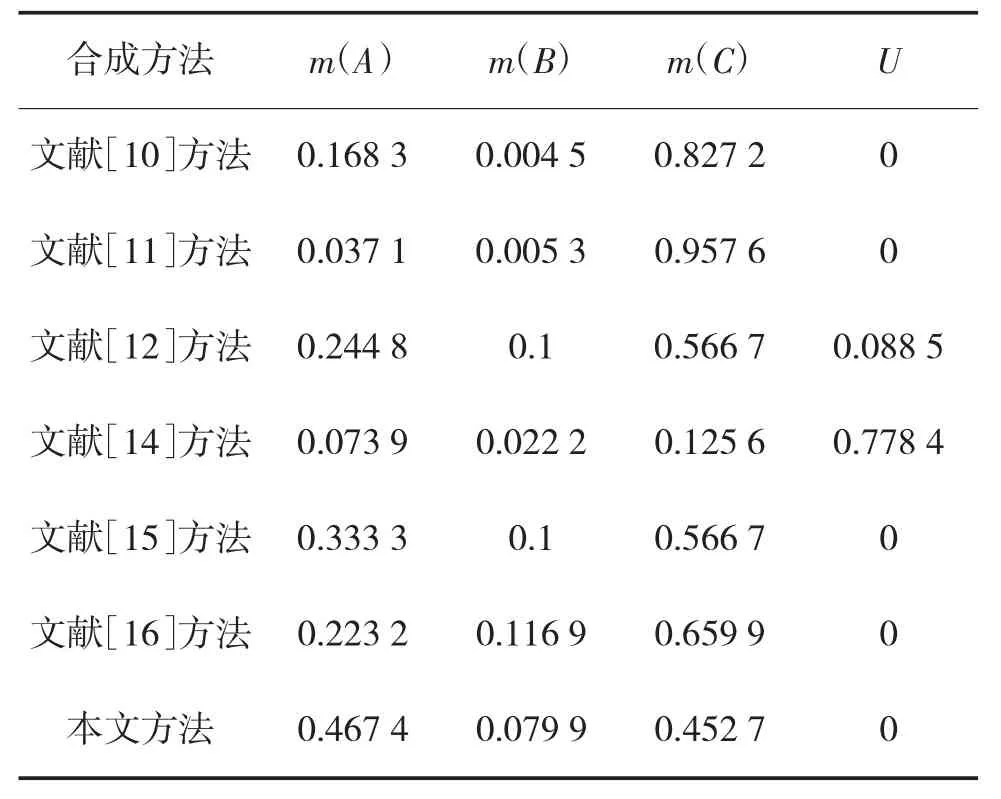
表2 各合成方法融合结果
5.2 非高度冲突证据下的弹头目标识别
设:采取抗干扰措施后,3部雷达又经过一段时间的观测,得出了如下的识别证据:
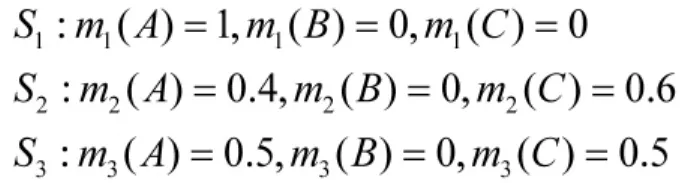
经过分析和计算,K=0.8,w=[0.4,0.3,0.3]。分别采用经典D-S合成规则、现有改进方法和本文方法对以上证据进行融合,可得相关的识别结果如表3所示。
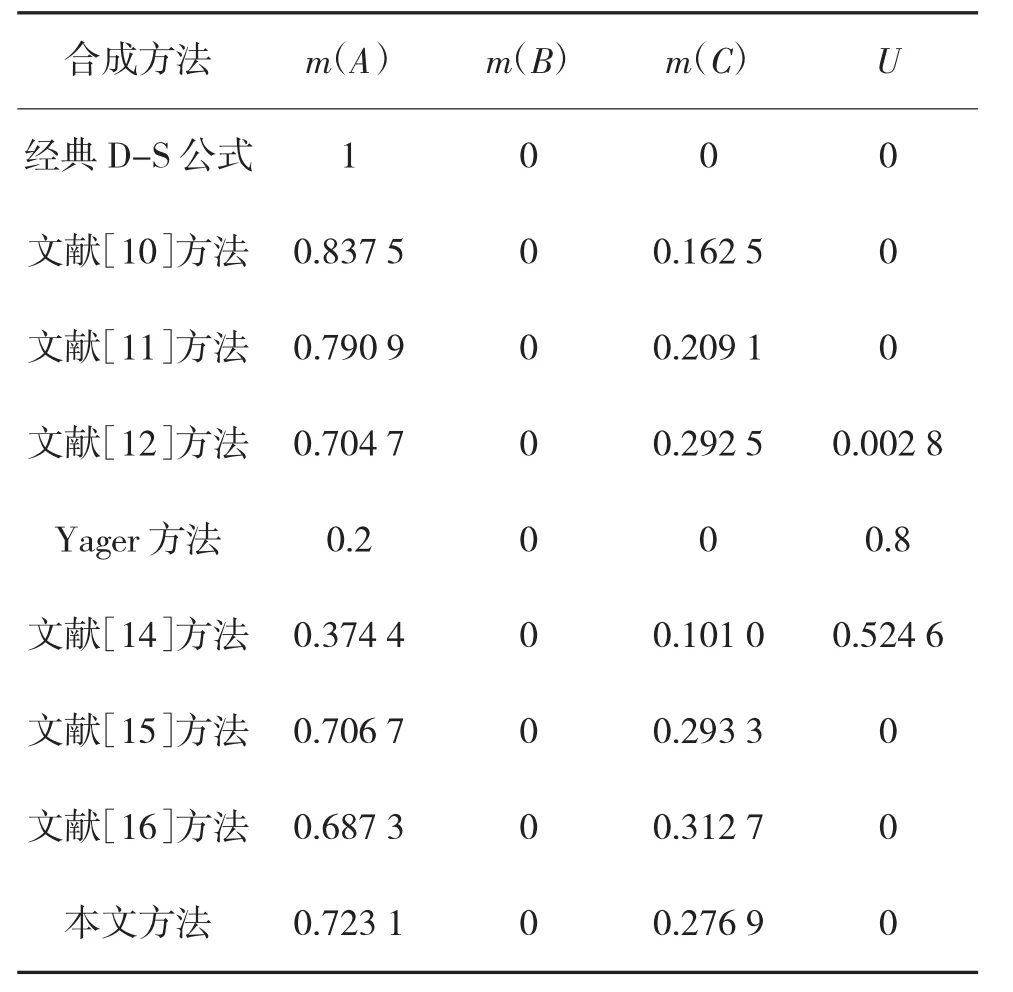
表3 不同合成方法下的融合结果对比
可以看出,在处理非高度冲突证据时,本文方法可以获得更加理想的效果。一方面,与其他基于改进合成规则的方法相比,本文方法的聚焦能力更强;另一方面,与修正原始证据的方法相比,本文方法更加贴合实际,可为识别融合与决策提供更加客观理性的结果。
6 结论
本文在综合现有方法优点的基础上,提出了一种更适用于多传感器弹头目标综合识别问题的证据合成规则。实例分析结果表明,新的证据合成方法能够获得更好的识别效果,不仅提高了弹头综合识别的鲁棒性与准确性,还降低了融合与决策风险。但是,该合成规则对证据的权重系数较为敏感,为了保证融合的可靠性与准确性,必须保持对传感器性能及其识别过程的实时监测与精准评估。
猜你喜欢
辽宁教育(2022年19期)2022-11-18
北京航空航天大学学报(2022年6期)2022-07-02
汽车实用技术(2022年9期)2022-05-20
汽车实用技术(2022年4期)2022-03-07
建材发展导向(2021年15期)2021-11-05
控制与信息技术(2021年2期)2021-07-23
现代仪器与医疗(2021年1期)2021-06-09
疯狂英语·新悦读(2021年1期)2021-01-27
幼儿智力世界(2016年6期)2016-05-14
祝你幸福·知心(2016年3期)2016-03-29
