
舰载激光武器打击目标外形提取方法
2019-01-14 03:39卢发兴邢昌风
火力与指挥控制 2018年12期
彭 聪,卢发兴,邢昌风
(海军工程大学电子工程学院,武汉 430033)
0 引言
激光武器打击目标时,发射激光束并持续照射目标上毁伤点,通过累积能量,造成目标毁伤。照射目标上不同部位,可造成不同程度的软硬杀伤,影响打击目标效果。不难发现,毁伤点的选取是其中关键。目前,目标毁伤点选取依靠人工在目标图像上选点,具有一定的盲目性[1-4]。为有效应对来袭目标,武器系统应具有自动确定目标毁伤点的能力,则要求系统有选择性地打击目标上的点,进而系统需要知悉目标在空间中的整体结构,该信息可以由捕获目标图像提供。图像信息包含目标外形、颜色等特征信息,其中外形特征与目标整体结构联系紧密。因此,提取目标外形是实现系统自动确定毁伤点的基础。通常,使用图像分割的方法提取目标外形。
图像分割方法适用于分离目标和背景,包括基于区域的图像分割和基于边缘的图像分割。基于区域的分割方法,通过设定分割阈值,将图像像素与阈值比较,依据比较结果进行前景(目标)和背景分类,包括直方图门限法、区域生长法等[5-7]。基于边缘的分割方法,又称图像边缘检测,利用图像一阶导数极大值或二阶导数过零点信息来判断目标边缘点,包括 Sobel、LoG、Canny 算子等[8-10]。但是,基于区域的图像分割结果并不十分准确,容易造成过度分割,即存在部分像素分类被混淆;图像边缘检测结果较为准确,可是所得真实目标边缘中包含有伪边缘。
本文采用峰值查找和色差阈值法完成图像各像素颜色聚类,得到颜色聚类图像;使用Canny算子对颜色聚类图像中目标进行边缘检测。依据上述目标外形提取方法,获取图像目标真实外形。目标外形提取能提供毁伤部位选择相关的目标外形信息,保证激光武器有效射击。
1 近似主色确定
由于受光照以及拍摄角度等影响,图像目标区域各像素在值上存在差异,但大体接近。因此,可以考虑将值互相接近的像素归于某一类主色中,即通过简化构成图像的色彩成分,对像素值重新赋值。首先,采用颜色分布直方图对图像色彩信息进行统计;然后,使用峰值查找算法确定近似主色。
1.1 颜色分布直方图
彩色图像由R、G、B 3个颜色通道组成,颜色通道间相互关联。如果仅凭单一颜色通道的灰度值分布确定灰度阈值并对彩色图像分割,则忽视了其余通道的灰度分布特点,造成分割不准确的结果。颜色分布图用于统计彩色图像3个颜色通道分量值频率分布。
RGB空间中每一种颜色由三维向量(R,G,B)描述,分量R、G、B取值范围为0~255且为整数。如图1所示,所有颜色向量包含于RGB彩色立方体,立方体顶点对应不同的颜色[11]。
对RGB空间而言,共包含2563=16 777 216个向量。对图像进行颜色统计时,若直接使用空间中所有向量进行颜色描述,则造成极大运算量。为方便统计,且不影响图像原有颜色分布,对RGB空间进行降维处理,减少表示向量数目;然后,对颜色信息重新量化:
1)RGB空间降维:通常彩色图像的每个颜色通道需要10~20个量化级别。将每个颜色通道原有的灰度级划分为10个级别i(i=1,2,…,10),级别 i对应的灰度级区域为 Ni=[Nimin,Nimax],其中[]表示取整运算,则降维后的空间包含颜色向量103=1 000个。

图1 RGB彩色立方体

2)颜色信息量化:按照新的量化级别,对图像像素点重新标志。像素颜色向量(R,G,B)量化后新向量为(iR,iG,iB),满足如下关系


图2 颜色信息量化图
按照式(1)将图2(a)每个颜色通道灰度级别划分为10个等级,按照式(2)对图2(a)中各像素初始颜色向量重新量化,即使用降维后得到的1 000种颜色向量替代初始向量。统计新的颜色向量在图2(a)中的分布特征,结果如图2(b)颜色分布直方图所示。
图2(b)中横轴为量化色域,表示降维后的种颜色向量;纵轴为出现频率,表示图2(a)中各颜色向量的数目。
1.2 峰值查找
颜色分布直方图完成了对图像所有色彩信息的统计,不难发现直方图中颜色向量频率差异较大,存在明显的峰值落差。峰值部分相关联的像素在整幅图像中占有绝大比例,确定图像近似主色成分就是对颜色向量进一步筛选,保留能反映图像颜色特征的部分向量[12-13]。
使用峰值查找算法,确定近似主色成分,步骤描述如下:
1)直方图中所有峰值点构成点集P1,作为初始峰值点集:

其中,P0为颜色分布直方图中包含的颜色向量集合,pi为单个颜色向量;h(pi)为颜色向量统计频率。
2)点集中每个元素(pi,h(pi))同相邻元素(pi-1,h(pi-1))和(pi+1,h(pi+1))进行比较,满足以下条件则保留:

得到新点集Pi。
3)重复步骤2)直到满足频率阈值条件,则结束:
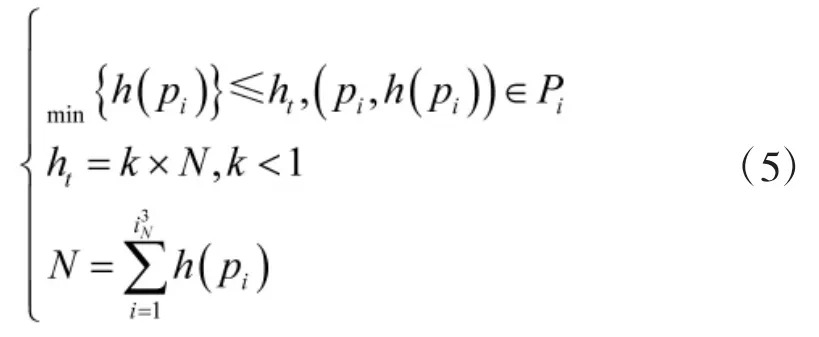
其中,ht为频率阈值,k为阈值系数,N为像素点总数;iN为量化级别,表示颜色向量种数。
步骤3)结束所得点集即为近似主色成分,图3为算法流程图。
取阈值系数k=0.003,图2(a)近似主色结果如图4所示。图中点表示峰值点,所得近似主色成分数目为30个。
2 颜色聚类
近似主色确定完毕后,依据颜色距离大小将图中像素归于某一类主色当中,即颜色聚类。颜色距离指色差大小,国际照明委员会(CIE)制定的CIE1976-L*a*b*规范是目前国际通用的色彩测量标准,可以精确地测量两种颜色之间的色差。
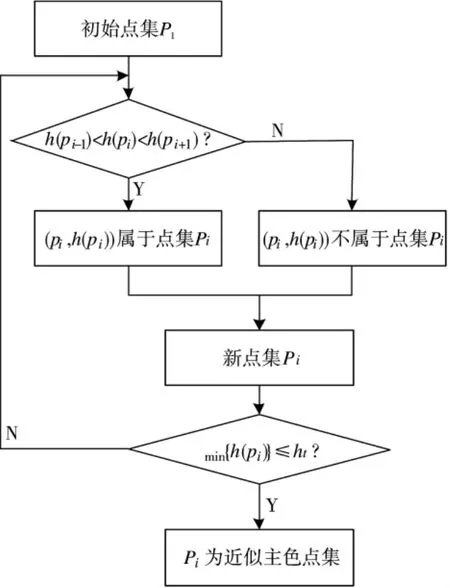
图3 峰值查找算法流程图
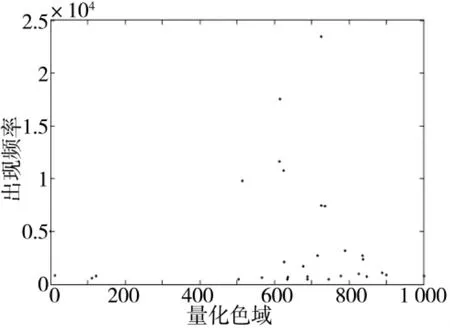
图4 近似主色峰值点图
2.1 颜色距离
CIE1976-L*a*b*均匀颜色空间是在RGB空间基础之上,制定了CIEXYZ基色系统和CIE-L*a*b*均匀颜色空间新标准。CIEXYZ基色系统用XYZ空间色彩重新表征RGB颜色。CIE-L*a*b*均匀颜色空间中,L*为明度坐标,表征颜色亮度大小;a*b*为色品坐标系,表征颜色的色调和饱和度。
从RGB空间到CIEXYZ基色系统的近似转换关系如下:

XYZ空间色彩对应的L*a*b*值计算如下:
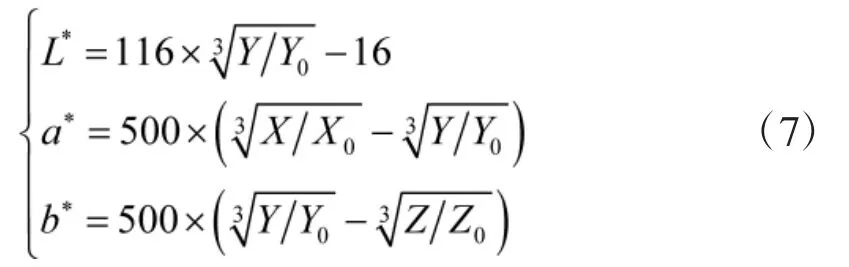
其中,X0=95.047、Y0=100.000、Z0=108.883 分别代表标准白板在D65光源下,视场中的三基色刺激值。
假定CIE-L*a*b*空间中,和分别代表像素xi和主色u对应的L*a*b*值,颜色距离计算如下:

其中,ΔL*为心理明度差,表示色彩亮度差异;Δa*和Δb*为心理色度差,表示色彩色相差异,其值为

2.2 颜色距离直方图
颜色距离直方图用于表征图像像素与主色之间的距离分布。最大颜色距离记为,则像素颜色距离范围为;颜色距离范围 M 等分,第m 个颜色距离区间段,
其中,[]表示取整运算,m=1,2,…,M∈Z+。像素点按照颜色距离区间段归类。主色u的颜色距离直方图H(u)可表示为

其中,h(m)表示像素点归于Lm的频率。


图5 颜色距离直方图
图5为一种近似主色的颜色距离直方图,横坐标表示颜色距离,纵坐标表示颜色距离包含的像素点数目。结合颜色距离直方图,采用色差阈值法,并对所有像素进行基于参考色的相似性分类。
色差阈值法基本步骤如下:
1)近似主色直方图构成集合H:

2)对于近似主色ui,对应的色差阈值为。若,则Lm上像素点均归于该主色集合满足条件:
其中,[]表示取整运算,kd为色差阈值系数(0<kd<1),N 为像素总数。
3)重复步骤2),直到得到所有主色像素点集合


新主色点集即为像素点颜色聚类,下页图6为色差阈值法流程图。
按照颜色聚类,将主色RGB值赋值给图像像素RGB值,如下页图7所示。
3 目标外形提取
颜色聚类完毕后,对图像中目标部分外形轮廓进行检测,最终确定图像目标可毁伤区域。Canny算法是一种最优边缘检测算法,采用高斯平滑模板对图像滤波,计算滤波图像灰度梯度值,使用双阈值法跟踪图像边缘,最终得到目标轮廓二值图像。
Canny算法主要步骤如下:
1)高斯平滑
利用高斯滤波器对图像进行滤波,滤波器是将高斯函数进行离散化得到的结果:

式(19)中k是滤波器维度,当k=3时,滤波器是一个 3×3 矩阵,Hi,j是该矩阵内第 i行第 j列元素(i,j=1,2,3)。使用该滤波器与图像做卷积运算,完成高斯平滑。

图6 色差阈值法流程图

图7 导弹颜色聚类图像
2)计算灰度梯度大小
图像相邻像素灰度间存在差异,称为灰度梯度,计算像素坐标(x,y)处灰度梯度大小:

3)非极大值抑制
寻找出准确的梯度方向,对每个像素点进行如下操作:
a)梯度方向假定一个方向,每个像素在邻域内包含上下左右和45°角8个方向;
b)比较该像素点和梯度方向上的像素点梯度大小;
c)如果该像素点梯度强度最大则保留,否则抑制(剔除)。
经过非极大值抑制后图像边界会保留最亮的一条细线。
4)边缘跟踪
边缘跟踪的目的是保证边缘结果是连续的闭合曲线,Canny算法使用滞后阈值,即设定一个高阈值和低阈值,当像素点梯度大于高阈值,则认为该像素必然是边界;当像素点梯度小于低阈值时,则认为必然不是边界。沿着步骤3)导出的梯度方向,开始跟踪图像整个边缘,利用低阈值可以筛选曲线模糊部分像素点,直到跟踪回到起点。
按照Canny算法步骤,对图7和图2(a)边缘检测,结果如图8(a)和(b)所示。
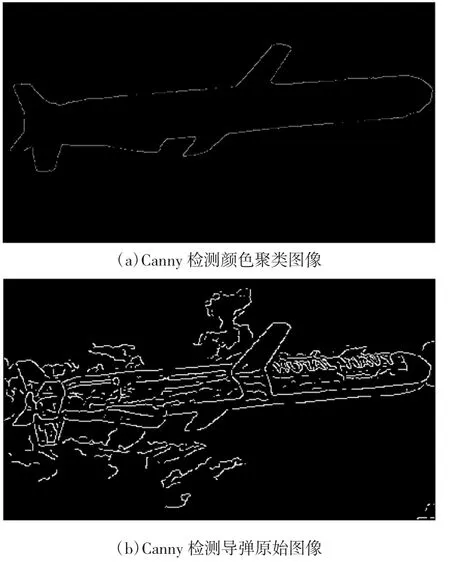
图8 Canny算法边缘检测
图8(a)中由像素值“1”所围成的闭合区域即为目标区域。相比较于(b),经过颜色聚类方法处理后,极大减少了伪边缘,同时比较完整地提取出了目标边缘信息。
4 结论
激光武器毁伤目标外形提取有助于武器系统对目标可毁伤区域自动选取,保证武器有效射击和提高作战效率。文中通过颜色聚类和Canny边缘检测的方法,对目标外形提取且效果较好。下一步将基于目标外形,对目标可毁伤部位识别并确认毁伤区域,完整实现激光武器打击目标时毁伤部位的选择。
猜你喜欢
合肥工业大学学报(自然科学版)(2021年11期)2021-12-10
天津医科大学学报(2021年1期)2021-01-26
现代电子技术(2021年1期)2021-01-17
计算机应用(2020年11期)2020-11-30
现代电子技术(2018年18期)2018-09-12
电脑知识与技术(2018年35期)2018-02-27
中学生数理化·高一版(2017年2期)2017-04-25
初中生世界·八年级(2017年3期)2017-03-24
通信产业报(2016年44期)2017-03-13
雕塑(1999年2期)1999-06-28
