
基于协同攻击区模型的多机最优攻击占位决策*
2019-01-14 03:38董海霞王永庭
火力与指挥控制 2018年12期
董海霞,邹 杰,王永庭
(1.中国航空工业集团公司洛阳电光设备研究所,河南 洛阳 471000;2.光电控制技术重点实验室,河南 洛阳 471000)
0 引言
空空导弹的攻击区,是指目标附近的这样一个空间区域:当载机在此空域内发射导弹时,导弹就能以不低于某一给定的概率杀伤目标[1]。攻击区能为空战中载机的攻击占位提供指导,是航空火力控制系统的研究重点。但通常载机的武器和探测设备性能不匹配,易造成攻击区损失。随着信息网络技术的发展,多机协同成为未来空战的主流作战方式[2-3]。近年来,国内外对能为载机提供更多攻击优势的协同攻击区理论和建模方法展开了研究。
文献[4]提出一种武器协调发射与网络制导方法;文献[5-6]研究了双机协同空空导弹攻击区;文献[7]对协同制导条件下的空空导弹攻击区解算方法进行研究,提出了导弹协同发射决策算法;文献[8]介绍了一种基于信息共享的机动目标协同跟踪与拦截策略;文献[9]对无人机研究了协同作战时的信息共享问题。但目前研究的协同攻击区实质上还是单机的攻击区:由占据探测优势位置的载机,为占据攻击优势位置的载机提供更多目标探测信息,使得攻击载机的导弹攻击区得以扩大。
本文研究多架协同机的攻击区合成问题,设计多机协同目标机动攻击区模型,为多机协同作战环境中载机的最优攻击占位决策提供新方法。
1 协同目标机动攻击区概念
在信息共享机制下,多架协同机可以同时参与导弹发射任务。通过合适的占位,使多架协同机攻击区合成后的协同攻击区,对目标形成不可逃逸攻击态势。再根据目标实际逃逸情况选取导弹发射机,可极大地提高目标命中率。
通过分析机动目标的各种逃逸策略,可认为目标的通用逃逸策略是先机动形成一定的转弯角,当航向满足要求时,目标以当前速度匀速水平直线飞行[10]。据此提出一种适用于多机协同作战环境的基于目标转弯角的目标机动攻击区概念。
目标机动攻击区是指,载机在当前位置发射导弹,能够顺利命中当前态势下目标的目标允许转弯角范围。显然,载机和目标态势不同,获得的目标机动攻击区也不同。用目标机动攻击区包线表示当前态势下目标不同转弯角对应的载机最大允许攻击距离,示意如图1所示。
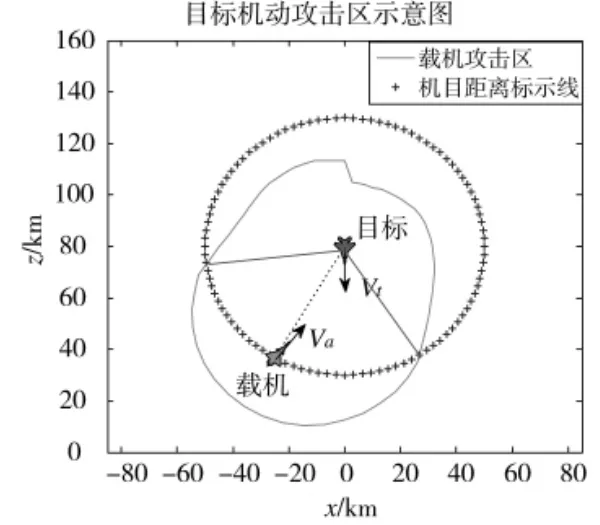
图1 目标机动攻击区示意图
载机在当前距离发射导弹能够命中目标的目标允许转弯角度范围称为θallow,在图示态势下,θallow为载机所在的红色标记线范围。从攻击区包线上可以获得,载机相对目标距离与目标允许转弯角θallow之间的关系。若目标转弯角度在θallow内,则载机在当前位置发射的导弹能顺利命中目标;反之,目标的转弯角度超过θallow范围,则载机在当前位置发射的导弹不能顺利命中目标。
协同目标机动攻击区是指,多架载机相对同一目标占位,协同机群能够顺利命中目标的目标允许转弯角范围。协同目标机动攻击区的目标允许转弯角范围,应为所有协同机目标允许转弯角范围的合成。两架载机的目标机动攻击区及组成的协同目标机动攻击区如图2所示。

图2 双机协同目标机动攻击区示意图
载机1的目标允许转弯角范围为标识线“左边界/载机1”和“右边界/载机1”组成的载机1所在区域;载机2的目标允许转弯角范围为标识线“左边界/载机2”和“右边界/载机2”组成的载机2所在区域;双机协同的目标允许转弯角范围为标识线“左边界/载机1”和“右边界/载机2”标识线组成的载机1,2所在区域。可以看出,协同目标机动攻击区相比单机攻击区,目标允许转弯角范围明显增大。
2 协同目标机动攻击区建模
目标在发现威胁后开始转弯逃逸机动,可设置目标的运动方式为:在载机导弹发射时刻开始机动转弯,当实现一定转弯角后转为匀速直线运动。对某态势确定的目标,载机能命中目标的目标允许转弯角范围θallow与载机速度Va,载机高度Ha,进入角q,离轴角εφ和载机相对目标距离Rat有关,可表示成式(1):

其中,进入角q是指目标速矢和机目瞄准矢量反向的夹角,左侧为正;离轴角εφ是载机速矢和机目瞄准矢量之间的夹角,左侧为正。载机目标相对态势如图3所示。

图3 载机目标相对态势图
载机携带某型中远距空空导弹。将导弹看作运动质点,在发射时刻导弹运动方程组可描述为式(2):

目标的运动方程组可表示为式(3):

根据上述模型,可以解算出任意目标转弯角下载机在当前态势能命中目标的最大允许相对距离,获得目标机动攻击区包线。相应地,就可以确定载机在当前距离处的目标最大允许转弯角范围θallow。
多架载机的协同目标机动攻击区,要综合所有协同机在当前态势下对目标的机动攻击区确定。有N架协同机,每架协同机在当前态势下发射导弹命中目标的目标允许转弯角范围记为,协同目标允许转弯角范围θallow,Cor为所有单机的目标允许转弯角θallow,i的并集。可表示为式(4):

协同机态势的组合不同,获得的协同攻击区也不同。当协同目标允许转弯角时,不论目标以多大转弯角机动,都处在协同机的攻击范围内,即目标不可逃逸。下面设计协同目标机动攻击区评价指标,分析协同机的最优占位决策。
3 多机最优协同攻击占位决策
3.1 最优协同攻击区评价指标
经过理论分析,当其他态势确定时,载机相对目标距离Rat越大,目标的允许转弯角范围θallow越小,呈负相关关系。可以建立以下两种评价指标搜寻最优协同攻击区。
1)协同机相对目标距离Rat设为常值,改变其他态势参数,能使协同目标允许转弯角范围θallow,Cor最大者为最优,即目标命中率最大,如式(5):


3.2 协同攻击区占位优势分析
载机对目标的高度、速度和角度占位对导弹的射程均有着重要影响[11-12]。要获得多机最优协同攻击占位决策,首先要分析占位态势中各因素对协同攻击区的影响,寻找使评价指标最优的协同攻击区。以双机协同为例,以目标不可逃逸距离最大J2为评价指标,用控制参量法分析载机目标相对高度、相对速度、相对角度占位对协同攻击区的影响。
3.2.1 高度占位优势
设置目标的马赫数Mat=1.1,高度Ht=12 km;协同机马赫数Mat=1.1,进入角对分析高度占位优势影响不大,设双机相对目标对称占位,进入角分别为q1=-10°,q2=10°。任意转弯角下目标不可逃逸距离随载机目标相对高度δH(=Ha-Ht)的变化曲线如图4所示。
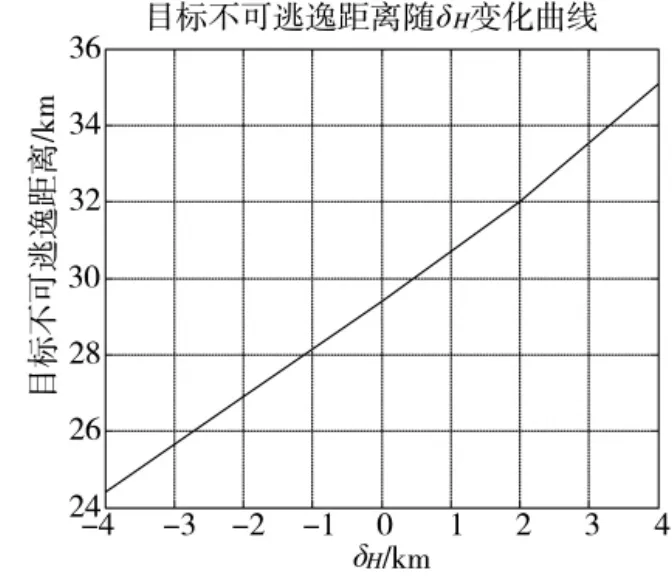
图4 目标不可逃逸距离随载机目标相对高度变化图
随着载机目标相对高度的增大,目标不可逃逸距离呈正比例增大。高度占位对空战优势影响很大,我机高度越高,目标不可逃逸距离越大,我机就能更早进入导弹发射条件。
3.2.2 速度占位优势
设置目标的马赫数Mat=1.1,高度Ht=12 km;协同机高度Ha=12 km,双机相对目标对称占位,进入角分别为q1=-10°,q2=10°。任意转弯角下目标不可逃逸距离随载机目标相对速度的变化曲线如图5所示。
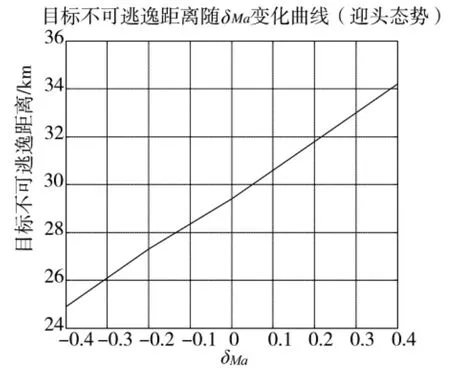
图5 目标不可逃逸距离随载机目标相对速度变化图
随着载机目标相对速度的增加,目标不可逃逸距离呈正比例增大。速度占位对空战优势影响很大,我机速度越大,目标不可逃逸距离越大,我机就能更早进入导弹发射条件,同时减少目标造成的威胁。
3.2.3 角度占位优势
设置目标的马赫数Mat=1.1,高度Ht=12 km,协同机马赫数Maa=1.3,高度Ha=14 km。分析协同机进入角q对协同攻击区的影响,可固定其中一架协同机的进入角q=-15°,另一架协同机进入角为任意值,协同双机与目标的进入角态势图如图6所示。
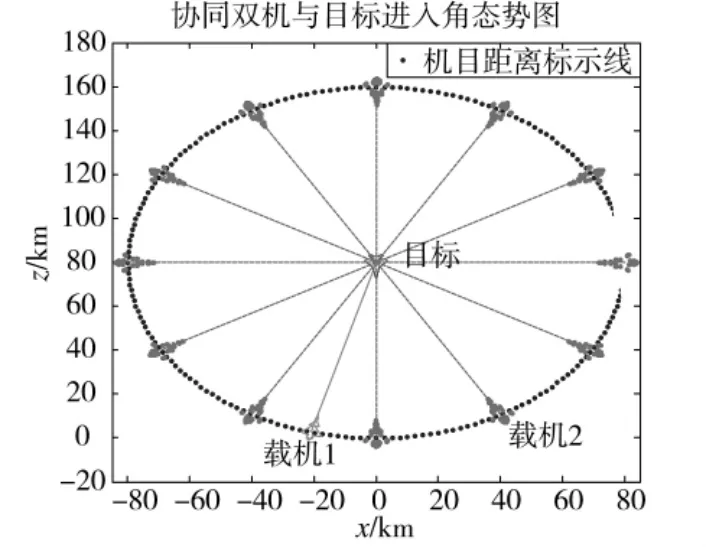
图6 协同双机与目标进入角态势图
通过仿真,任意转弯角下目标不可逃逸距离随另一架协同机进入角的变化曲线如图7所示。

图7 目标不可逃逸距离随载机目标进入角变化图
随着协同机进入角q的增大,目标不可逃逸距离呈先增大后减小趋势,在协同机q=15°,两架协同机相对目标对称占位时,目标不可逃逸距离取得最大值;当协同机进入角q在±180°附近,即尾追态势时目标不可逃逸距离最小。
根据载机目标相对高度、相对速度、相对角度占位对协同攻击区的影响,能够获得使协同攻击区最优的协同机占位方案。
4 双机协同最优攻击占位决策仿真算例
设置目标的马赫数Mat=1.1,高度Ht=12 km。以目标转弯开始时间为仿真时间起点,目标的机动逃逸策略是匀速圆周转弯,转弯过载值为3,目标截获概率是0.95。两架协同机进行速度、高度和进入角占位,取值范围分别为:速度、高度Ha∈[8 km,16 km]和目标进入角 q∈[-180°,180°)。
对双机协同攻击区模型多次仿真并解算指标值。经过仿真结果分析,该目标态势下,双机最优协同攻击区占位决策为:两架协同机马赫数Maa=1.5,高度Ha=16 km,两架协同机的进入角分别为q1=20°,q2=-20°。仿真结果如图8所示。
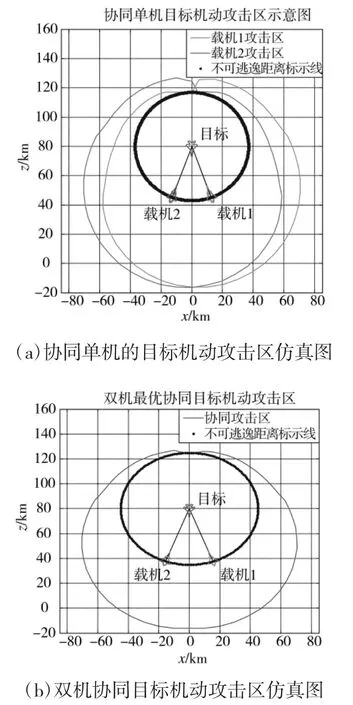
图8 双机最优协同目标机动攻击区仿真结果图
由仿真结果可见,基于协同攻击区模型制定的最优协同攻击占位决策与协同机占位优势分析结论相吻合。协同机的最优高度占位和速度占位为最大允许值,协同机相对目标侧向占位,进入角对称。双机协同目标机动攻击区相比协同单机的目标机动攻击区,导弹允许发射范围明显增大,目标不可逃逸距离增大为45 km。
5 结论
本文在攻击区理论的基础上,设计了适用于多机协同作战环境的基于目标转弯角的协同目标机动攻击区模型;其次设计合适的评价指标选择最优协同攻击区,分析了协同机的高度、速度和进入角占位优势;最后通过双机协同最优攻击占位决策仿真实验,验证了本文基于协同攻击区模型制定最优攻击占位决策方法的可行性。
本文的研究具有以下创新点:
1)设计了适用于多机协同作战环境的协同目标机动攻击区模型。
多机协同目标机动攻击区能显著增加导弹发射机会,允许载机在较远距离就发射导弹实现对目标的不可逃逸攻击。同时,由于协同目标机动攻击区模型不需要假设目标运动方式,增加了攻击区解算的准确性。
2)为多机协同空战环境下载机最优攻击占位决策的制定提供新的依据。
通过目标机动攻击区,能评估载机在当前位置对选定目标进行攻击的优势区域与薄弱区域,便于制定多机协同最优攻击占位方案。协同机偏侧接敌占位攻击,既有助于避开敌机雷达的优势探测区,避免受到目标过多的威胁,且载机发射导弹后更易规避目标,能极大地提高载机的生存率。
猜你喜欢
航天电子对抗(2022年4期)2022-10-24
导弹与航天运载技术(2022年2期)2022-05-09
兵器装备工程学报(2020年9期)2020-10-12
科技创新与应用(2019年24期)2019-10-24
军事运筹与系统工程(2019年3期)2019-08-13
船舶标准化工程师(2019年4期)2019-07-24
当代陕西(2019年12期)2019-07-12
汉语世界(The World of Chinese)(2019年1期)2019-03-18
中国科技术语(2004年3期)2004-03-11
航空知识(2001年5期)2001-06-12
