工作流可满足决策(≠)的完备独立树分解回溯法*
2018-12-25 08:52:16翟治年卢亚辉余法红高慧敏
计算机与生活 2018年12期
翟治年,卢亚辉,余法红,高慧敏
1.浙江科技学院 信息与电子工程学院,杭州 310023
2.深圳大学 计算机与软件学院,广东 深圳 518060
3.嘉兴学院 数理与信息工程学院,浙江 嘉兴 314001
4.嘉兴学院 机电工程学院,浙江 嘉兴 314001
1 引言
工作流技术通过形式化建模与分析,实现业务执行的自动调度,在云制造、众包等平台中起着重要作用。工作流每个步骤有一个授权(资源)列表,某些步骤的执行资源之间须满足一定约束。所谓工作流可满足决策(workflow satisfiability decision,*WS)寻求满足授权和约束的任一资源分配解,可为业务正确执行提供最低限度的保证。由于互斥是广泛存在的职责分离等多种约束类型的特殊情形,并经常参与各种组合约束配置,故仅含互斥约束的*WS是一个基本问题,记为*WS(≠)。它具有NP完全性[1],且实用中可能涉及多达上百个步骤,故其算法的理论和实际性能是研究社区关注的焦点。
WS(≠)的早期研究[2-4]中,求解方法均为各种形式的穷举搜索,时间复杂度通常为O*(|U||S|)级(U、S分别为资源集和步骤集),随着步骤集规模增长,实际性能下降很快。2011年,Basin等人对带选择分支的工作流研究了互斥和绑定约束下的*WS,并给出了一种多项式时间近似算法,但其依赖于大量资源和授权均匀分布假设,且某些有解的情况会被判定为无解[5]。2013年,Crampton等人将多种*WS(≠)归约为集合最大权划分,得到了小底数的指数时间复杂度,其*WS(≠)情形的时间复杂度为O*(2|S|(|X|+|U|2))[6](X为互斥约束集),这是目前最好的结果。但其空间代价为指数级,严重限制了求解规模。2014年,Cohen等人识别了一大类约束的正规性或资源独立性特征,据此提出了模式编码技术,并给出了相应*WS的动态规划算法,其时间复杂度为O*(3|S|wlbw),其中w是正规性等价关系关于资源集的分散度[7],随后又针对资源独立性计数约束的*WS,给出了类似的算法[8]。2014年,Yang等人对考虑控制流结构的*WS进行了较全面的复杂性归类[9],但未求解其中的NP难问题。2015年,Karapetyan等人将模式编码与回溯搜索结合,提出了*WS的模式回溯算法,在正规性约束下具有目前最好的实际性能[10]。2016年,Crampton等人将资源独立约束推广为类独立约束,给出了层次组织约束*WS的模式回溯算法[11],其关于资源独立约束的退化情形即为Karapetyan的算法。对于资源独立约束,模式回溯算法的空间复杂度为O(|S|×|U|),但其时间复杂度为O*(B|S|),B|S|为第|S|个贝尔数[10]。由于B|S|的增长比2|S|和3|S|等指数函数快得多,上述结果仍然很不理想。总的来说,现有*WS(≠)研究取得了多方面进展,出现了一些代表性算法,但其对理论或实际性能、时间或空间优化往往会牺牲相对的指标,失衡情况严重,亟待研究综合性能良好的新型算法。
工作流可满足性是约束可满足问题(constraint satisfaction problem,CSP)在访问控制约束下的特殊情形。在CSP研究中,约束图树分解是保证理论性能的重要方法,可得到以树分解宽度+1为幂指数的时间复杂度。同时,回溯法深度优先和及时剪枝的搜索方式契合CSP寻找第一个可行解的问题性质,是其完备求解的主要方式。2003年,Jegou等人将两种技术结合,提出了树分解回溯(backtracking treedecomposition,BTD)的方法[12],以兼顾理论和实际时间性能,但缓存造成了较高的空间复杂度。根据*WS(≠)的特点,本文拟利用BTD来解决前述性能失衡问题。这是因为:工作流约束用来表达关键性业务规则,其密度通常较低,有利于控制树分解宽度;BTD的回溯搜索有很大机会快速找到一个解,并由此避免缓存过度扩张。
然而,BTD在确定兄弟子问题的相互独立性时,仅以待赋值变量集之间的约束不相关性为依据,而未证明其变量不相交,无法保证子问题的解兼容。随后,BTD得到了不同角度的增强和应用,如2003年和2004年将BTD用于求解Valued CSP和Max-CSP问题的工作[13-14],2007年关于BTD中变量排序规则的研究[15-16],2009年将BTD应用于#CSP的#BTD算法[17],2014年为包连通树宽概念给出树分解算法并将其引入BTD的工作[18],2016年对#BTD的全局一致性改进[19],2017年通过重启搜索来提高BTD性能的研究[20],等等。这些变种算法研究均以BTD子问题独立性为基础,但未见指出其成立条件缺失问题,并给出变量不相关性证明,故BTD的成立基础仍比较脆弱,亟待进行相关的理论研究。
本文从低约束密度下的技术选型出发,通过深入BTD基本理论的研究,得到了*WS(≠)性能平衡问题的一种正确有效的解决方案,其主要贡献是:(1)从变量不相交和约束不相关两个角度提出了一种完备的BTD子问题独立性,克服了现有BTD不能证明子问题变量不相交的基本缺陷,进而给出了相应的部分解缓存原理。(2)通过逐级分解为独立子问题,并利用缓存避免重复求解,设计了一种WS(≠)决策算法,并通过交替归纳的方法证明其正确性。该算法时间复杂度为O*(|S|3×dW+1),幂指数可小于步骤集规模,且在较低约束密度下实测性能突出。
2 预备知识
本章介绍CSP及约束网络树分解的概念。
定义1(约束可满足问题)CSP定义为四元组<V,D,E,R>,其中:V是有限变量集,每个v∈V存在有限值域dv,D={dv|v∈V},E是2V子集的多重集,表示约束集,每个e={v1,v2,…,vk}∈E有值域de⊆dx1&dx2&…&dxk(&表示无序卡氏积),而R={de|e∈E}。图<V,E>称为该CSP的约束网络。
定义2(赋值与可行解)给定前述的CSP,对任何Y⊆V,称函数是Y的赋值。由于值域已确定,此函数可记为α:Y,若Y可由上下文确定,也可记为α。
若任取v∈Y,均有α(v)∈dv,则称α符合变量值域。若对任何e={v1,v2,…,vk}∈E且e⊆Y,均有{α(v1),α(v2),…,α(vk)}∈de,则称α符合约束值域。若α同时符合变量和约束值域,则其是合法的。整个V的合法赋值称为CSP的可行解。
按求解目标的差异,CSP分为三类:求任意一个可行解(或指出其不存在)的,称为CSP决策;仅判断可行解存在与否的,称为CSP判定(determining CSP);求所有可行解个数的,称为CSP计数(counting CSP,#CSP)。
CSP的搜索求解可能用到以下概念:
定义3(赋值投影)给定赋值α:Y′,若Y⊆Y′,则α在Y上的投影α↑Y是Y的赋值,且任取v∈Y,有α↑Y(v)=α(v)。
定义4(赋值兼容)设赋值α1:Y1和α2:Y2均合法,若存在合法赋值α:Y1⋃Y2,使α↑Y1=α1且α↑Y2=α2,则称α1和α2兼容,否则称两者冲突。
定义5(赋值扩展) 设有赋值α:Y和α′:Y′,且Y⊆Y′,若α′↑Y=α,则称α′是α在Y′-Y上的扩展。显然,若α和α′都合法,则两者一定兼容。
为了分解约束网络的复杂性,介绍如下概念:
定义6(图的树分解)给定图<V,E>,其树分解定义为二元组<C,T>,其中T=<I,F>是顶点集为I、边集为F的树,而C={Ci|i∈I}是V的子集族。因T的每个顶点i对应一个变量簇集Ci,<C,T>可视作以C为顶点集的树。它满足以下性质:
(2)任取e∈E,存在i∈I使得e⊆Ci。
(3)任取i,j,k∈I,若在树T中k位于从i到j的路径上,则Ci⋂Cj⊆Ck。
W=maxi∈I|Ci|-1称为树分解的宽度。CSP的树宽w定义为其约束网络所有树分解的最小宽度。
对i,j∈I,约定:C(i)表示Ci各祖先结点的变量集,则C[i]=C(i)⋃Ci表示Ci及其祖先结点的变量集;sup(i)和subs(i)分别表示i的父亲和所有儿子;Desc(j)表示j及其所有后代,而。
3 工作流可满足决策(≠)
约定S表示工作流的步骤集,U表示其资源集。
3.1 问题定义
本节给出互斥约束WS决策问题的定义。
定义7(授权)授权A={UA(s)|s∈S},其中UA(s)是步骤s的授权资源(即候选执行者)列表。
定义8(互斥约束集)互斥约束集X⊆S&S,表示步骤间的二元职责分离关系:若{s,s′}∈X,则对工作流的同一案例,s和s′的执行资源不能相同。
定义9(资源分配)资源分配π:S→U为工作流案例的每个步骤指派唯一的执行资源。
定义 10(*WS(≠)问题)*WS(≠)定义为四元组<S,U,A,X>,须求任一资源分配π:S→U,使任取s∈S,π(s)∈UA(s),任取{s,s′}∈X,π(s)≠π(s′)。
3.2 问题求解
3.2.1 BTD的子问题独立性缺陷
BTD的核心概念是如下描述的子问题独立性。
定理1[12]设图<V,E>有树分解<C,T>,其中T=<I,F>,且I的先根遍历序列Γ=1,2,…,|I|。若i,j∈I,i<j且i=sup(j),则没有和v∈Desc(Cj)-Ci⋂Cj使得{u,v}∈E。
该定理表明:若删除Ci⋂Cj所含变量,则Desc(Cj)中各簇集所含剩余变量与Cj之前所有簇集所含剩余变量之间的约束联系将被切断。在此基础上,现有BTD导出了相应的子问题独立性关系。设j1<j2<…<jq均为i的儿子,1≤p<q,由定理1:Desc(Cjp)-的合法赋值不会因彼此约束而发生冲突。若Ci已合法赋值,则其每个儿子Cjk(1≤k≤p)代表的子问题(须为Desc(Cjk)-Ci赋值)可依次独立求解。然而,完成子问题求解后,须将相应部分解组合进父问题的部分解。若Cjp和Cjq相应子问题的变量集,即Desc(Cjp)-Ci与Desc(Cjq)-Ci,存在重叠变量v,则它们的独立求解可能对v赋不同的值,从而导致两个部分解冲突。
为保证BTD的正确性,约束不相关和变量不相交条件缺一不可。前者可由定理1加以保证,但后者尚未从理论上得到证明。由子问题独立性衍生的BTD缓存设计原理(见文献[12]引理1)也存在类似缺陷,即不能保证缓存部分解与其他部分解兼容。
3.2.2 新的BTD子问题独立性及其缓存原理
针对BTD的上述缺陷,本文将建立一种完备的子问题独立性。首先给出本文的基本定理。
定理2设i,j∈I,f={i,j}∈F,从T中删除f得到两个连通片Ti=<Ii,Fi>和Tj=<Ij,Fj>,其中i∈Ii,j∈Ij,则:
证明(1)用反证法。假设,则必存在p∈Ii和q∈Ij使得v∈Cp⋂Cq。由于Ti和Tj是T删除f所得两个连通片,因此p和q在树T中经f连通,即连通二者的路径经过i和j。由定义6(3)可知,Cp⋂Cq⊆Ci⋂Cj,从而v∈Ci⋂Cj,与矛盾。
任何变量簇集Ck都位于Ti或Tj之一,而Ci⋂Cj是两者的交界。该定理表明:(1)删除Ci⋂Cj中的变量,则剩余所有变量分为不相交的两部分;(2)这两部分之间无约束(易知(2)是定理1的推广)。这样,只有Ci⋂Cj的赋值才会影响的赋值。该定理有如下推论(设i,j∈I,且sup(j)=i):
推论1
证明由于,只须证明Desc(Cj)-即可。反设存在v属于前者而不属于后者,则必有。由于,又有,与定理2(1)矛盾。
该推论表明确定C[i]、Ci或Ci⋂Cj的赋值后,对以Cj为根的子树,将得到同样的剩余变量集。由此可给出子问题的三种等价条件,其中第一种用于设计算法的递归结构,第三种用于部分解的缓存。
现在给出本文的子问题独立性概念,表述如下:
定理3设j1<j2<…<jk为i∈I的所有子结点。若给定C[i]中所有变量的合法赋值,则任取1≤p≠不相交,且两者之间无约束。
证明设fp={i,jp},则T-fp分为两个连通片,一个由导出,设为,另一个设为,则必有,即,则由推论1:
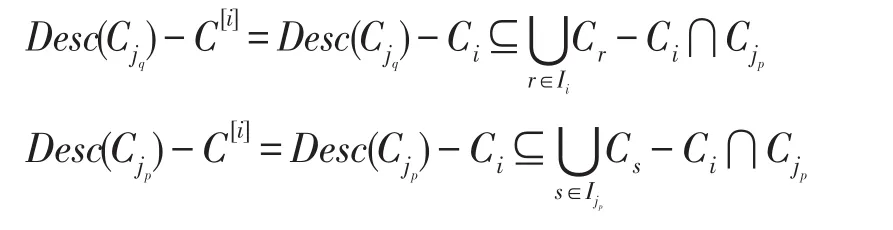
再由定理2即可导出本命题的结论。
该定理表明:在树分解中,当所有祖先结点中所含变量已合法赋值时,对两棵兄弟子树各自的剩余变量进行赋值,将是完全独立的子问题。若其都有与前提兼容的部分解,则可以无冲突地合并。这就为设计CSP的递归算法提供了依据。在C[sup(i)]合法赋值后,为求解Ci代表的子问题(对Desc(Ci)中剩余变量赋值),可先对Ci(中剩余变量)尝试赋值,对它的每一种(与C[sup(i)]兼容的)合法赋值,求解各子问题Cjt(1≤t≤k)。
由推论1,子问题Cjt的变量集Desc(Cjt)-C[i]=Desc(Cjt)-Ci⋂Cjt,而定理2表明,其赋值只受Ci⋂Cjt的赋值影响。于是,子问题Cjt仅以Ci⋂Cjt的赋值为条件。若Ci的不同赋值在Ci⋂Cjt上投影相同,则相应子问题Cj只须求解一次。进而,可建立如下缓存原理:
定理4设<C,T>是CSP约束图<V,E>的树分解,T=<I,F>,i,j∈I,且sup(j)=i。又设变量集Y≠Y′满足Ci⋂Cj⊆Y,Y′⊆V-(Desc(Cj)-C[i])。若α:Y和α′:Y′均合法,且在Ci⋂Cj上投影相同,则有:
(1)α在Desc(Cj)-C[i]上有合法扩展,当且仅当α′在Desc(Cj)-C[i]上有合法扩展。
(2)设αX是α在Desc(Cj)-C[i]上的合法扩展,则αX↑(Desc(Cj)-C[i])与α′:Y′兼容。
证明(1)只证必要性,充分性类似。反设α′:Y′在Desc(Cj)-C[i]上无合法扩展。由定理条件可知Desc(Cj)-C[i]与Y′不相交,且由结论(1)左端不难得出Ci⋂Cj和Desc(Cj)-C[i]各自有合法赋值且两者兼容,故Desc(Cj)-C[i]与Y′-Ci⋂Cj之间必然存在约束。但Y′-Ci⋂Cj⊆V-(Desc(Cj)-C[i])-Ci⋂Cj=(V-Ci⋂Cj)-(Desc(Cj)-Ci⋂Cj)=(V-Desc(Cj))-Ci⋂Cj,由定理2(2)不难推出Y′-Ci⋂Cj与Desc(Cj)-C[i]=Desc(Cj)-Ci⋂Cj间无约束,矛盾。
(2)易知αX、α和α′在Ci⋂Cj上的投影均相同。由αX合法知该投影与αX↑(Desc(Cj)-C[i])兼容。又Y′-Ci⋂Cj与Desc(Cj)-C[i]不相交、无约束,故整个α′:Y′与αX↑(Desc(Cj)-C[i])也兼容。
该定理表明:不同前提下的子问题Cj是等价的,只要前提在Ci⋂Cj上的投影相同,且一个前提下的部分解与另一个前提兼容。在某个前提及相应Ci⋂Cj赋值下求出子问题Cj的部分解后,可将其写入缓存,若在新前提下求解子问题Cj,只要Ci⋂Cj的赋值相同,均可读取缓存结果,避免重复求解。
3.2.3 WS(≠)决策的BTD算法
本节基于上述理论建立一种新的*WS(≠)算法。目前已有工作将#BTD用于WS(≠)计数[21],但其未从理论上识别和解决前述的独立性问题,算法的结果构造、搜索组织和缓存利用方式也不同于本文。下面给出本文算法的描述(因不同连通片对应独立的问题,只须考虑连通约束图)。
算法1*WS(≠)-BTD//A1
输入:α,Ci,Ri,其中Ci是<S,X>树分解的当前结点,α是对C[sup(i)]中所有和Ci-C[sup(i)]中部分步骤的合法赋值,而Ri是Ci-C[sup(i)]的α未赋值变量集,故Dom(α)=C[i]-Ri。
输出:与α兼容的合法赋值β:Desc(Ci)-Dom(α),或当其不存在时,返回β=NULL。β可看作单变量赋值的集合,故其为∅表示无剩余步骤须赋值。
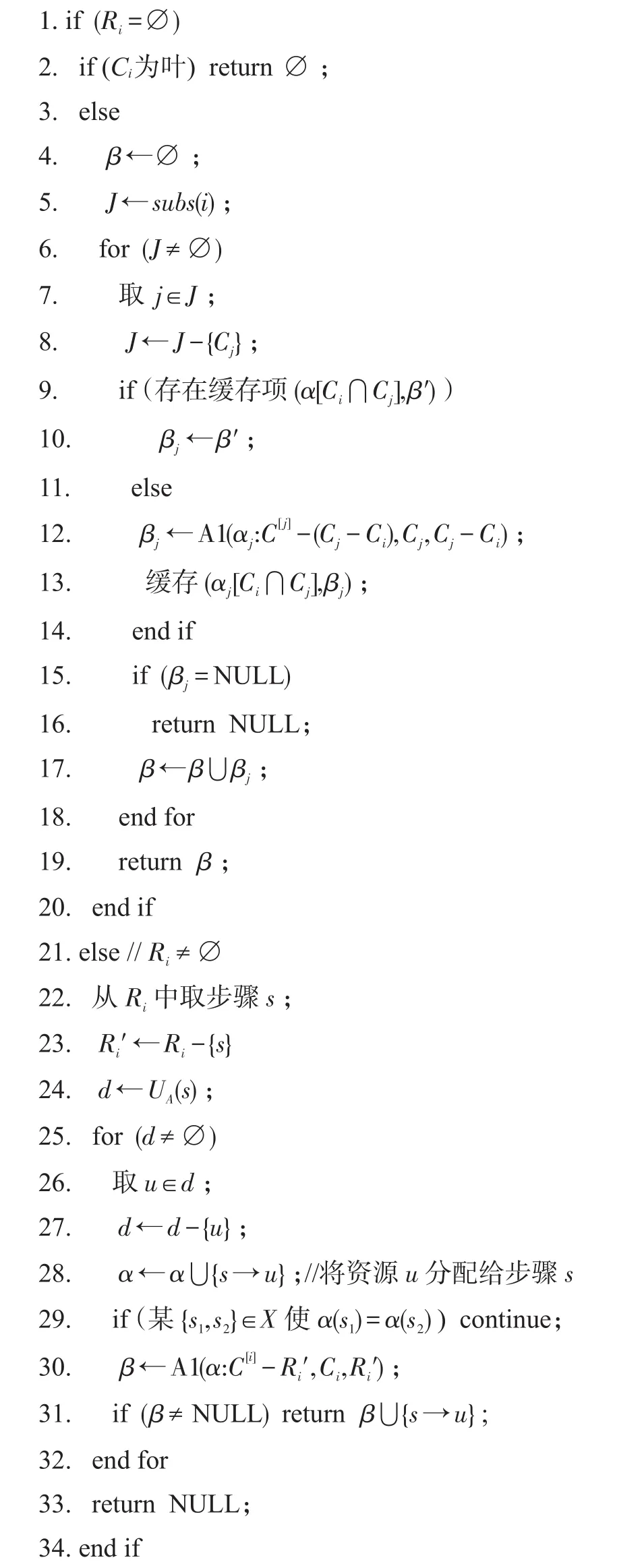
初始调用为A1(α:∅,C1,C1),C1为树分解的根。
若算法1是正确的,即其任何对满足输入要求的α,Ci,Ci,均可返回满足输出要求的β,则其对满足Dom(α)=C[1]-C1=∅ 的初始调用,若返回β:Desc(Ci)-Dom(α),即为树中也是问题所有变量的一个合法赋值,若返回β=NULL,上述合法赋值必无解。该*WS(≠)算法的正确性已蕴涵其完备性。
为证明算法1正确,根据其结构特点,本文将分条件按两个值做归纳:(1)若Ri≠∅,按|Ri|做归纳,其基始为Ri=∅ 的情况,归纳假设定义于Ri的基数为|Ri|-1的真子集;(2)若Ri=∅,按Ci与其后代叶子的最小高差做归纳,基始为Ci为叶的情况,归纳假设定义于Ci的每个儿子。两种基始情况叠加即为整个证明的基始。若忽略约束满足要求,则任意待证情形都可还原至这一基始,只须交替向两种归纳假设针对的情形转化。对(1)的情况,连续转化至对应归纳假设,最终将变为(2)的情况,此时若当前结点Ci非叶,则向对应的归纳假设转化,将对其每个儿子,得到(1)的情形,如此交替,直至在每个叶子上都有Ri=∅。而若考虑约束要求,某些中间情形可能找不到合法赋值,此时可直接判定其无解,不必还原至基始。具体的归纳证明如下:
基始。Ci为叶且Ri=∅ 时,须验证A1(α,Ci,Ri)正确返回。此时,第2行返回∅ 。因β的定义域Desc(Ci)-Dom(α)=Ci-(C[i]-∅)=∅,返回正确。
归纳步骤。对Ci非叶或Ri≠∅ 的情况,目标是基于如下归纳假设,证明A1(α,Ci,Ri)正确返回:
(1)待证情形满足Ri≠ ∅ 时,假设任取s∈Ri,A1(α:C[i]-(Ri-{s}),Ci,Ri-{s})正确返回。
(2)待证情形满足Ri=∅ 时,若Ci为叶,则为基始情形,已验证成立;否则任取Cj∈subs(Ci),假设A1(α:C[j]-(Cj-Ci),Cj,Cj-Ci)正确返回。
归纳步骤的证明如下:
若Ri≠ ∅,第22~33行将寻找s∈Ri,及其与α兼容的(合法)赋值s→u。若找到,由归纳假设(1),第 30 行调用 A1(α:C[i]-(Ri-{s}),Ci,Ri-{s})将正确返回。若β≠ NULL,则与 (α:C[i]-Ri)⋃{s→u}兼容,且其定义域为:
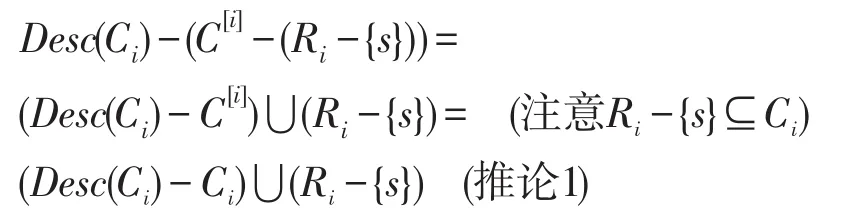
第31行为其附加s→u后返回,恰为(Desc(Ci)-Ci)⋃Ri的α:C[i]-Ri兼容赋值,因而正确。若穷尽UA(s)都找不到兼容的s→u,或者每次找到后第30行都返回NULL,则α:C[i]-Ri无合法扩展,从而第 34 行返回NULL也正确。
若Ri=∅,考查Ci。若其为叶,则落入基始情形。若其非叶,第4~19行对每个Cj∈subs(Ci)调用A1(αj:C[j]-(Cj-Ci),Cj,Cj-Ci)(或读取缓存),得到βj。由归纳假设(2),调用都将正确返回(而缓存是之前的调用结果),故所得βj都是正确的。若某个βj=NULL,则α:C[i]不可能有合法扩展,故第16行返回NULL是正确的。否则,每个βj都是Desc(Cj)-(C[j]-(Cj-Ci))的αj兼容赋值。由于C[j]-(Cj-Ci)=(C[j]-Cj)⋃(Ci⋂Cj)=(C[i]-Cj)⋃(Ci⋂Cj)(注意C[j]=C[i]⋃Cj)=(C[i]-Ci⋂Cj)⋃(Ci⋂Cj)(由定理 2(1)推导可知,C[i]⋂Cj⊆,有αj=α和Dom(βj)=Desc(Cj)-C[i]。由定理3,各Dom(βj)不相交,无约束,故第19行返回是(注意且Ci⊆C[i])=Desc(Ci)-(C[i]-∅)的α兼容赋值,是正确的。
综合基始与归纳步骤,算法1是正确的。
算法1的时间代价分为三部分:(1)每个结点内的回溯搜索(第22~32行)。(2)整体结构上深度优先处理相关代价,包括取下一子结点(第6~8行),合并子问题部分解(第15~17行)。(3)缓存查找(第9行)和插入(第13行)。各自分析如下:
(1)由于缓存的使用,相应于Cj⋂Ci的每一合法赋值,对Cj-Ci的回溯搜索至多执行一次,故每结点内的回溯搜索至多执行一次。每个结点所含变量至多W+1个,其值域大小至多,又每个变量至多与|X|-1个变量互斥,每次赋值后至多验证min{|X|,|S|}个约束,而结点数为O(|S|),故这部分的总代价为O*(|S|2×dW+1)。
(2)由于深度优先处理可能回溯到父结点和重新进入子结点,每个结点可多次到达,但次数不超过其父结点局部解空间的大小(只有父结点被搜索时,才可能进入其子结点,而父结点至多执行一次完整的回溯搜索),即为O(dW+1)次,每次到达需要取该结点的所有儿子,所有子问题递归调用结束后执行部分解合并,均需要O(|S|)代价,由于总结点数为O(|S|),这部分的总代价为O*(|S|2×dW+1)。
(3)对树分解每条边对应的割集,设一个平衡二叉查找树作为缓存,割集大小即关键字比较代价,不超过,每一缓存的关键字数量为O(dw)个,读取/写入一个解的代价为O(|S|),故每次查找/插入代价为O*(|S|wlb(dw)),又每个缓存可被访问O(dW+1)次(子结点到达次数),故这部分的总代价为O*(|S|×dW+1wlb(dw))=O*(|S|3×dW+1)。
综上知算法1的时间复杂度为O*(|S|3×dW+1),因(W+1)/|S|不超过1且可能相当小,若d也较小则可优于文献[6]的O*(2|S|(|X|+|U|2))时间。
算法1的空间代价主要是缓存,由前述分析,每一缓存占O((w+|S|)dw)=O(|S|×dw)空间,而缓存个数或割集数为O(|S|),故总的空间为O(|S|2×dw)。
4 实验研究
本章对算法1的性能进行实验研究。本文和对比算法均以C++实现,并使用GMP算术库处理大整数。实验环境为:3.4 GHz Core i3 CPU、16 GB RAM、RedHat Enterprise Linux 7(64 bit)虚拟机(宿主系统为Windows 7),GNU C++编译器。
二元随机CSP的标准模型采用变量个数、值域大小、约束密度和约束紧度四个参数控制实例生成。对于*WS(≠),须增加反映变量值域差异的参数,且互斥约束两端的变量值域即可决定其紧度(违反约束的元组数/该约束值域中所有可能的元组数)。本文通过以下参数控制实例生成:步骤集规模|S|、资源比例μ=|U|/|S|(取资源集规模|U|=|S|×μ)、约束密度ω=2|X|/(|S|×(|S|-1))(以概率ω决定在每一对步骤之间是否生成约束)、每个步骤s的授权比例k=UA(s)/|U|(从U中随机取|U|×k个资源作为s的授权资源集UA(s))。
实验1现有*WS(≠)算法中,文献[6](记为C13)具有最低的时间复杂度,文献[10](记为PB)具有最好的实测时间性能,本实验将与它们进行性能对比,验证算法1的优势。算法1和PB两种回溯算法的实现,均未采用变量排序等额外优化。测试数据模拟较低约束密度下通常规模范围内的工作流,单个实例的生成规则如表1第一行所示。
首先取l=10,u=30,按规则生成400个随机实例,对三种算法的运行时间和峰值空间进行测试。在5 min内,算法1解出了全部实例,PB有1个实例未解出,C13只解出了95个实例。三者在解出实例上的平均时间:算法1为688 μs,PB为1 199 μs,而C13为52 s。C13最多只能求解|S|=17的实例,而算法1和PB均可求解|S|=30的实例。C13在95个解出实例上的最低运行时间为448 ms,而算法1和PB在同样实例上的最大运行时间分别为500 μs和391 μs。尽管C13有最低的时间复杂度,但其实际时间性能与后二者差距很大。一个重要原因是C13基于组合计数而非搜索策略,且空间代价为指数级,仅空间初始化就要相当时间,后二者均为回溯搜索,有机会快速找到一个解。在各自解出实例上的峰值空间:算法1为13.0~13.1 MB,平均13.0 MB,PB始终为12.8 MB,而C13为56.7 MB~14 GB,平均2.9 GB,其最大值已接近测试机物理内存容量。实际上,C13进程在未解出实例上往往运行不足5 min,即因内存分配失败被杀死。根据上述实验,算法1和PB在实测时间和空间性能上远优于C13,而两者之间相对接近,算法1的解出率和平均时间较优,而空间占用略高。

Table 1 Generating rules for test instance表1 测试实例生成规则
进一步取l=31,u=100,按规则生成600个实例,对算法1和PB进行扩展测试。算法1仍然在5 min内解出全部实例,PB的未解出实例为26个。两者在解出实例上的平均时间,算法1为23 ms,PB为406 ms。算法1的解出率和平均时间取得了更大的优势。在共同解出实例上的峰值空间,算法1为13.0~18.9 MB,平均14.3 MB,PB为12.8~13.2 MB,平均12.8 MB。算法1的空间性能仍然略弱于PB。
基于前述1 000个实例的测试结果,图1给出了算法1和PB在973个共同解出实例上的运行时间(μs)对比。图中每个点对应一个实例,其横、纵坐标分别为算法1和PB的运行时间。以x=1 500和y=1 500将该图分为4个象限。在第4象限的实例中,PB均优于算法1,不过最多只快2.9 ms。在第3象限的大部分实例中,PB算法占优,但最多只比算法1快1.1 ms。在第2象限的全部和第1象限的多数实例上,算法 1 优于 PB,比后者快 32 μs~31 s,平均约158 ms,在剩余实例上,PB比算法1快1 μs~83 ms,平均约18 ms。相对于在另外两个象限的劣势,算法1在这两个象限取得了非常显著的优势。对973个实例整体进行统计,算法1的平均时间为13 ms,而PB的平均时间为240 ms,算法1比PB快17倍以上。从分布情况来看,算法1的执行时间集中在较小的区间内,而PB的执行时间更为分散。统计可知,算法1的标准差与平均值之比为1.6,而PB为23.6,算法1围绕均值的平均波动幅度比PB小13倍以上。
综合实验1的结果可知:算法1的解出率、时间和空间性能均远优于C13;算法1较PB有略高的5 min解出率,在解出实例上有13倍以上的平均时间和稳定性优势,其空间性能略弱于后者。
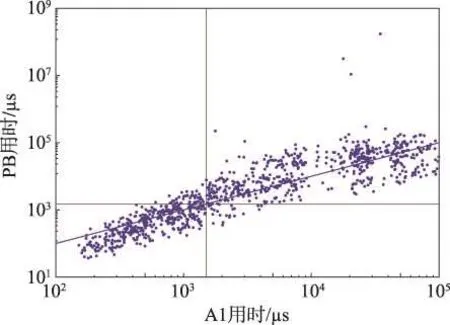
Fig.1 Comparison between runtime ofA1 and PB图1 算法1与PB的执行时间对比
实验2实验1表明了算法1在较低约束密度下的优势,下面进一步考查约束密度增加对其时间性能的影响,即固定|S|和μ,观察算法1执行时间随ω的变化。实例生成规则如表1第二行所示,对每一组|S|.μ.ω,重复生成30个实例,取其中30 min解出实例的平均时间作为测试结果,以消除具体约束分布造成的偶然性。
在生成的4组960个实例上执行算法1,得到如图2所示的4条结果曲线。每条曲线中,运行时间均随约束密度而增加。|S|=200且μ=35的曲线,在ω=75时出现了比较明显的抬升。该点的运行时间约为8 s,是18个重复实例的平均值。该配置集中了960个实例的所有超时情形,有12个实例未在30 min内解出,而其余所有解出实例的最大耗时仅为8 s左右。这就表明,当约束密度大到一定程度时,对于步骤数量很大的实例,算法1的时间性能可能会发生恶化。
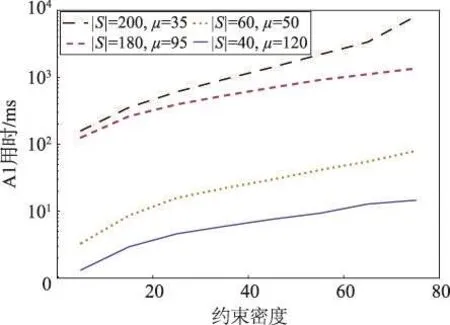
Fig.2 Runtime changes with constraint density图2 运行时间随约束密度的变化
图3给出了上述4组实例树分解宽度W的变化情况,每条曲线的走势与图2中对数纵坐标下对应的曲线大体相仿,两张图中4条曲线之间的差距情况也基本一致。这说明当约束密度ω增加时,算法1时间效率的降低主要是由W增加引起的。进一步观察可知,当ω较小时,图2中每条曲线的增长比较接近甚至慢于图3中对应曲线,而当约束密度较大时,图2中曲线的增长快于图3中对应曲线,甚至末端明显抬升。主要原因是W达到一定大小前,算法可能很快找到一个解,之后由于解空间指数级膨胀,这种机会性急剧降低,使算法效率更接近其理论最坏情形(上述每组实例的资源数均大于10,其最坏情形都是比10W+1更陡峭的曲线),图2曲线的增长速度也随之显现。故约束密度较低时,W的值和算法1的时间复杂度更容易受到控制,而实际性能也更容易利用回溯搜索的机会性取得好的表现。

Fig.3 Tree-decomposition width changes with constraint density图3 树分解宽度随约束密度的变化
5 结束语
本文根据工作流的低约束密度特征,利用树分解回溯技术研究性能平衡的WS(≠)决策算法,从理论上解决了该技术的完备独立分解问题,建立了相应的缓存原理,设计和证明了正确的算法。算法时间复杂度为O*(|S|3×dW+1),而(W+1)/|S|≤1可取得相当小的值,相对于现有算法时间复杂度均以|S|为指数的情况,一定条件下具有理论优势。实验表明,本文算法有良好的时间性能,明显优于现有实测性能最好和时间复杂度最低的算法。尽管其空间复杂度为指数级,但实测空间性能也有较好表现。
猜你喜欢
四川大学学报(自然科学版)(2023年1期)2023-04-29 00:44:03
榆林学院学报(2022年4期)2022-08-02 14:30:42
公民与法治(2020年23期)2021-01-04 01:02:24
公民与法治(2020年3期)2020-05-30 12:29:56
中国外汇(2019年14期)2019-10-14 00:58:32
计算机与生活(2018年8期)2018-08-15 08:24:34
数学物理学报(2018年1期)2018-03-26 08:16:42
妈妈宝宝(2017年2期)2017-02-21 01:21:22
理科考试研究·高中(2016年9期)2016-05-14 00:12:18
电子设计工程(2014年12期)2014-02-27 11:58:23