
信号交叉口人行横道混合交通流秩序评价模型
2018-11-20 03:40周予婷
深圳大学学报(理工版) 2018年6期
于 泉,周予婷
北京工业大学北京市交通工程重点实验室,北京 100124
目前,在中国城市道路交叉口交通流中,非机动车和行人所占比例相对较大,混合交通流是城市交通问题的重要研究内容.信号交叉口区域非机动车、机动车及行人的混合明显,位于信号交叉口处的人行横道是辅助行人过街的基本设施,人行横道上右转车与行人、行人与行人、以及少部分行人与非机动车的冲突,会对交通秩序产生较大影响.混合交通流及其相关研究对解决城市交通问题具有重要意义.
已有文献对混合交通流以及交通冲突进行了相关研究.钱大琳等[1]分析了干扰对混合交通流速度的影响,并从微观角度提出干扰的计算方法;苏光庭[2]分析了交叉口干扰分布特性,并对干扰的时间和空间分布进行研究,得出交叉口内混合交通流相互干扰的3个分布特性,分别为干扰分布的随机性、延展性和时空性;李珊珊[3]通过扩展社会力模型对平交路口处机动车、自行车、行人及其相互干扰行为建模研究;HOSSAIN等[4]采用仿真分析了混合车流中速度与自行车比例之间的关系.对于交通冲突的研究主要集中在冲突时间(time to conflict, TTC)、交通熵及碰撞次数上[5-8].现有研究主要考虑的影响因素为速度、通行能力、交通量及车头时距等,未考虑交通流的轨迹,研究对象以机动车居多,对于包含行人、自行车、电动自行车及机动车等在内的混合交通流之间的冲突研究还不够完善.
本研究对信号交叉口处人行横道上,处于冲突中的混合交通流的速度、加速度及轨迹进行分析,为评价冲突对混合交通流秩序带来的影响,引入了秩序度的概念.秩序度是交通流遵循合理运动特征的程度,是各种交通流遵从合理运动轨迹和规则的度量,以无干扰时交通流的交通特性为参考,被观测交通流的交通特性与之相差越多,说明其秩序越混乱,秩序度越低.一般来说,秩序度的大小与冲突的严重程度成反比.在实地拍摄和调查基础上,研究由于信号控制和让行规则的约束,人行横道上机动车、非机动车、行人交通流运动规律以及产生冲突时,各个交通流主要交通特性的变化,从而建立人行横道上的秩序度评价模型.
本研究基于以下前提进行分析:① 行人、机动车和非机动车无违法违规现象;② 信号交叉口为四相位信号交叉口,观测样本均取自行人相位期间;③ 信号交叉口允许红灯期间右转,右转机动车不受信号控制;④ 非机动车根据行人相位进行穿越;⑤ 右转车辆均为小汽车.
1 冲突区域中的混合交通流特性
人行横道上的冲突主要由行人与行人、行人与非机动车、行人与相交进口道右转机动车,以及行人与相邻进口道右转机动车冲突组成,其对应冲突区域如图1.定义右转机动车与相交进口道行人冲突区域为冲突区1;行人与行人、非机动车冲突区域为冲突区2;右转机动车与相邻进口道行人冲突区域为冲突区3.
本研究对位于北京市朝阳区劲松桥下交叉口的200名行人、120辆非机动车以及95辆机动车进行观测,观测时段为工作日的08∶00—08∶40,16∶00—16∶40,天气情况良好,交通量较大,但尚未出现拥堵.有冲突与无冲突情况下的样本量各占总样本量的50%.
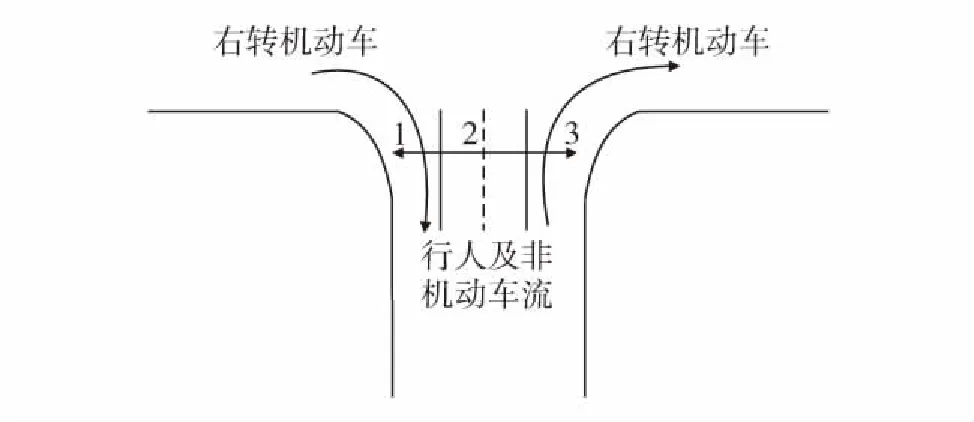
图1 冲突区域划分Fig.1 Conflict regions
1.1 冲突区1与冲突区3混合交通流特性
本研究以内侧行人(右转机动车司机右侧的行人)与相交进口道右转机动车冲突为例分析.
1.1.1 行人交通特性分析
1) 行人速度特性.
美国交通工程师协会指出,行人的步速约为1.20 m/s,而在人行横道上,由于信号相位和个体差异的影响,行人的步速会有所变化.根据调查数据,本研究取无干扰时行人速度平均值,即1.35 m/s作为过街速度参考标准值.定义过街时间为人行横道长度除以过街速度参考标准值.
对北京劲松交叉口与相交进口道右转机动车冲突的过街行人进行观察,通过视频追踪软件标定,得到冲突区1有无冲突情况下的行人速度对比如图2(a).可见,当冲突区1发生冲突时,由于右转机动车的干扰,行人速度显著下降,为了安全,部分行人存在长时间停滞不前的现象,速度接近0.
2)行人加速度特性.
根据对劲松桥交叉口的观察,得到当与右转机动车发生冲突时,行人通过冲突区域全程加速度分布如图2(b).显然,无论是否有冲突,行人的瞬时加速度无明显变化.
3)行人轨迹特性.
无干扰情况下,行人不会频繁改变行进轨迹,行人过街的轨迹都接近一条直线, 仅存在微小的水平偏移量[9],这种偏移量主要体现在行人过街全程的位移与路程大小的不一致上.为确定与右转机动车的冲突对行人轨迹的影响,采用计算行人轨迹路程位移比的方式.
行人轨迹路程位移比在有无冲突时的对比如图2(c),有无冲突时行人轨迹的路程位移比值并无明显改变,即行人轨迹波动情况无较大改变.这是因为,行人与右转机动车发生冲突时,由于选择改变轨迹从机动车前绕过十分危险,多数行人会根据实际情况选择原地等待或者快速通过,因此右转机动车对行人带来的影响主要体现在行人的通过时间上,而非轨迹.
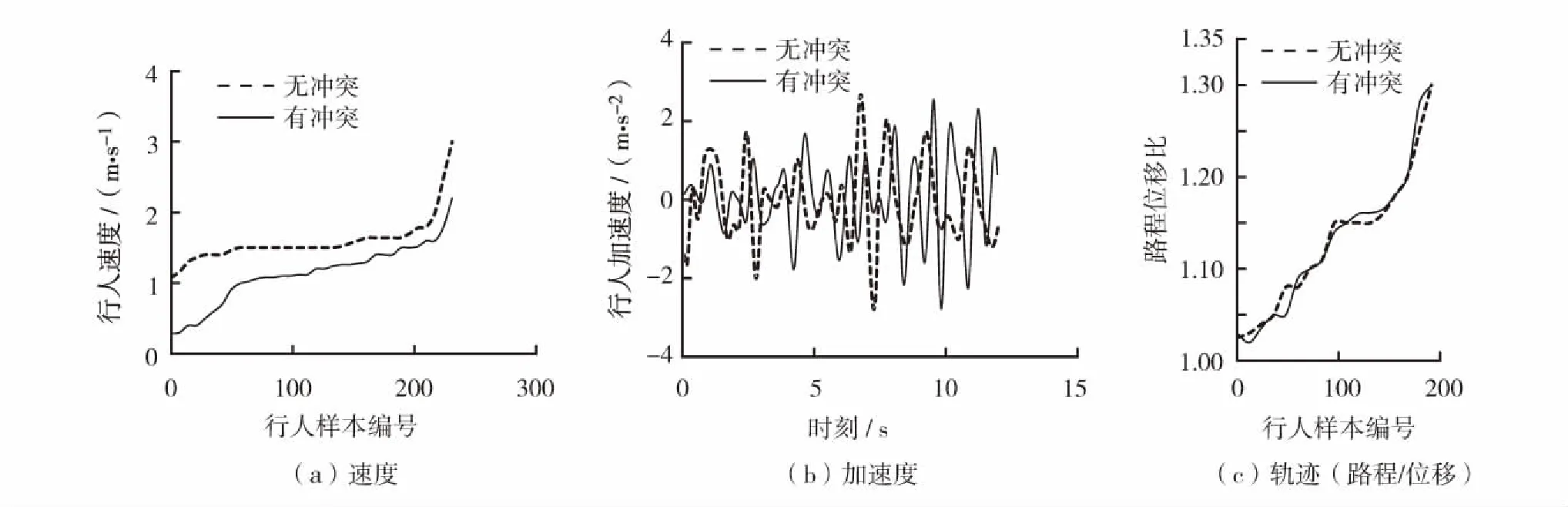
图2 有无冲突行人交通特性对比Fig.2 Contrast of pedestrian’s traffic characteristics with and without conflicts
1.1.2 右转机动车交通特性
1)右转机动车速度特性.
机动车右转时,由于运行方向的改变,速度显著下降.在冲突区1,有无冲突时机动车通过冲突区域的速度对比如图3(a).冲突后机动车的速度主要分布在2~5 m/s,明显小于无冲突时的速度.说明右转机动车与相交进口道人行横道上的行人冲突时,右转机动车的速度明显下降.
2)右转机动车加速度特性.
有统计结果表明,无干扰情况下右转车辆右转过程中的瞬时加速度基本分布在-5~5 m/s2,随着右转机动车完成转弯,加速度越来越趋向0.
根据劲松桥交叉口的观察,与行人发生冲突时,右转机动车通过冲突区域全程加速度分布如图3(b).无论是否有冲突,右转机动车过街全程的加速度分布和波动均无明显变化.
3)右转机动车的转弯半径.
右转机动车的转弯半径R可以有效表征右转车辆的行车轨迹,其计算为
(1)
其中,n为观测时间段内的周期数;Ri为右转车辆在i时刻的瞬时转弯半径,且
(2)
其中,X和Y分别为转弯车道线型的圆心的横坐标与纵坐标;Xi和Yi分别为右转车辆在i时刻的横坐标与纵坐标.
行人冲突前后右转机动车的转弯半径对比如图3(c),与相交进口道行人发生冲突时,右转机动车的转弯半径明显增大,分布范围由8.0~10.0 m增加到8.5~12.0 m.右转机动车与外侧行人冲突时分析方法类似,不再赘述.
冲突区3 的交通流特性分析结果与冲突区1相同,限于篇幅,在此从略.
1.2 冲突区2交通流特性
通常情况下,在人行横道上会存在少量非机动车与行人混行,行人之间的冲突和行人与非机动车的冲突常同时发生,因此,本节将两种冲突相结合进行分析.
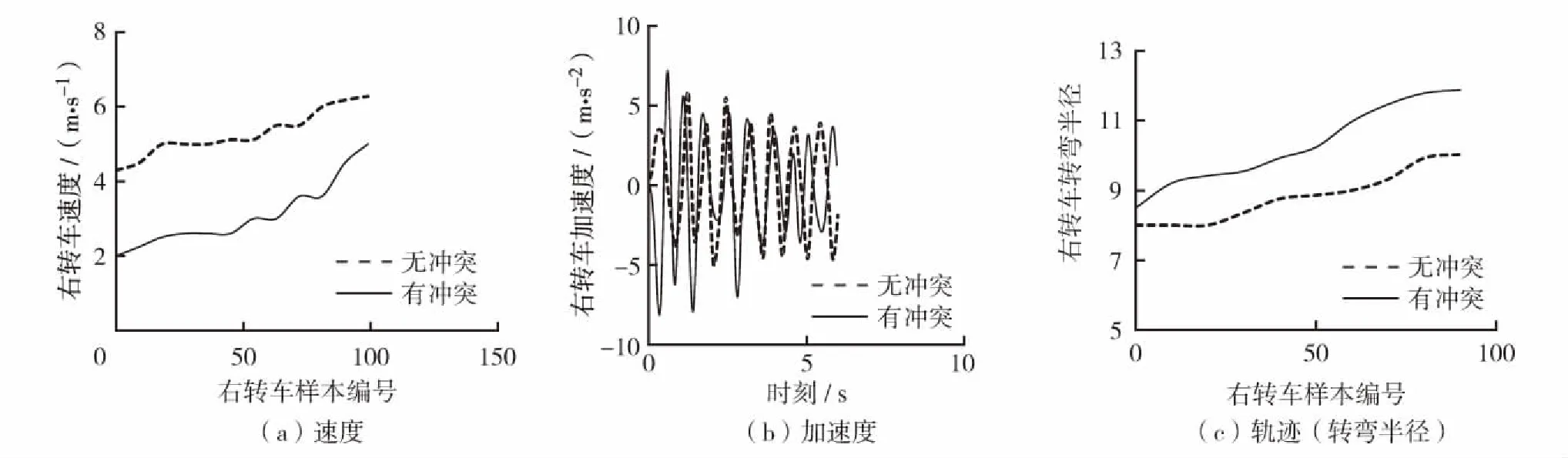
图3 有无冲突右转机动车交通特性对比Fig.3 Contrast of traffic characteristics of right-turning motor vehicle with and without conflicts
1.2.1 行人交通特性分析
1)行人速度特性.
与对向行人或非机动车发生冲突时,行人过街速度与未冲突时的速度对比如图4(a).可见,与对向行人或非机动车冲突时,行人速度有所减小.
2)行人加速度特性.
图4(b)为北京市劲松桥东西向进口道人行横道在某一时段内,与行人或非机动车发生冲突时,行人加速度与未冲突时的加速度对比.显然,冲突前后行人的加速度并无明显变化.
3)行人轨迹特性.
发生冲突时行人过街轨迹的路程位移比与未冲突时的对比如图4(c).可见,在有冲突情况下,行人轨迹的路程位移比值显著增大.这表明在冲突情况下,行人轨迹产生了较大幅度的横向偏移.冲突对行人的轨迹产生明显影响.

图4 有无冲突行人交通特性对比Fig.4 Contrast of pedestrian’s traffic characteristics with and without conflicts
1.2.2 非机动车交通特性
1)非机动车速度特性.
自行车过街速度一般处于2~5 m/s,本研究取无干扰情况下自行车过街速度的平均值3.5 m/s作为自行车过街速度的参考标准值.目前对于电动自行车过街速度的研究相对较少,电动自行车的速度与自行车相比更快,《道路交通安全法》[10]第五十八条规定“残疾人机动轮椅车、电动自行车在非机动车道内行驶时,最高时速不得超过15 km/h”, 本研究取无干扰情况下电动自行车过街速度的平均值3.9 m/s为其参考标准值.定义非机动车的过街时间参考标准值为人行横道长度除以非机动车过街速度参考标准值.
与对向行人发生冲突时,非机动车的速度受到显著影响,其速度与未受干扰时的非机动车速度对比如图5(a)和图6(a),自行车、电动自行车与对向行人冲突时,速度均显著下降.
2)非机动车加速度特性.
非机动车的加速度相对行人来说较为集中,更加收敛于0,这是因为非机动车的速度更快,对于干扰的敏感程度比行人低,改变速度不如行人灵活.加速度值相对稳定,如图5(b)和图6(b)所示.与行人冲突时,非机动车过街全程的加速度分布与未冲突时相比并无明显变化.
3)非机动车轨迹特性.
与行人相同,出于尽快离开交叉口的心理,非机动车行驶在人行横道上的轨迹近似直线,保证以最快速度离开.同样,非机动车的直线轨迹也会出现微小波动.
同样利用路程位移比表征非机动车轨迹的横向波动.有无干扰情况下的自行车与电动自行车的路程位移比值如图5(c)和图6(c) .可见,与行人轨迹相同,在有冲突情况下,非机动车的路程位移比值出现变化,与无冲突情况下的最大值相差较大,其他值则较为吻合.这是因为与行人相比,自行车和电动自行车改变方向更缓慢,骑车者更多的选择减速来避免冲突;但当骑车者较为激进或者赶时间时,会选择拐急弯来躲避冲突,寻求更多的可通过间隙,此时冲突就会对非机动车的轨迹产生明显影响.

图5 有无冲突自行车交通特性对比Fig.5 Contrast of bicycle traffic characteristics with and without conflicts
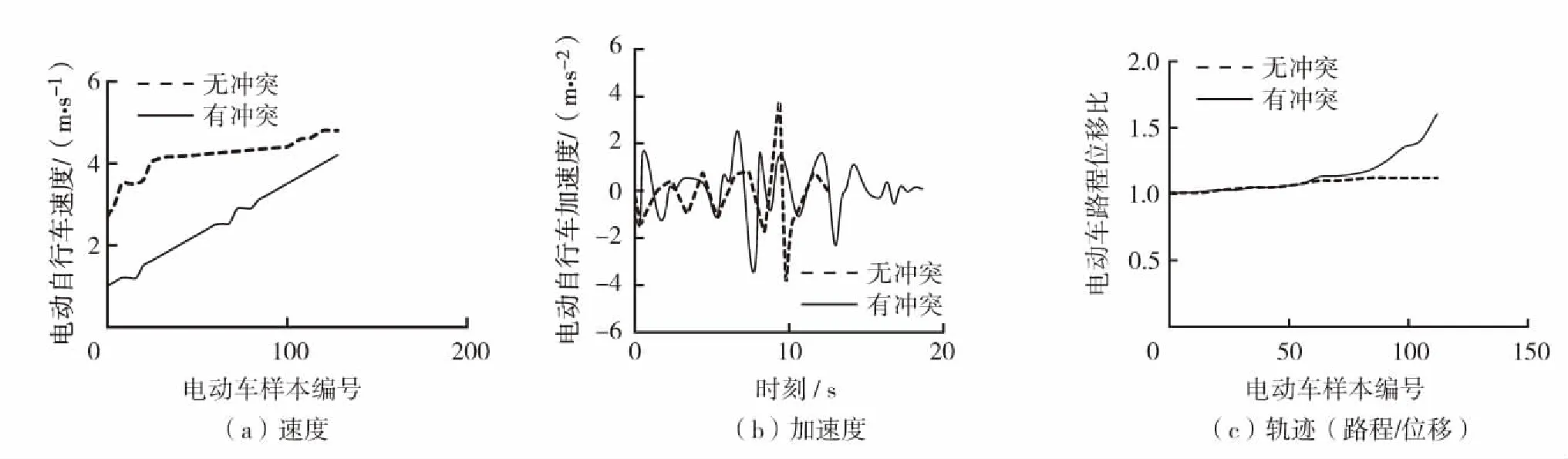
图6 有无冲突电动自行车交通特性对比Fig.6 Contrast of electric bicycle traffic characteristics with and without conflicts
根据上述分析,各个冲突区域发生冲突时交通参数的变化特征如表1.其中,画“√”选项为冲突后有明显变化的项,产生明显变化的参数可作为评价秩序度的特征参数.据此可建立人行横道上的秩序度模型.
2 人行横道秩序度评价模型
2.1 冲突区1与冲突区3的秩序度
由上述分析可知,行人与右转机动车发生冲突时,右转机动车的速度和转弯半径以及行人的速度均发生明显改变,因此,周期i内冲突区1和冲突区3冲突点的秩序度Ki为
(3)
其中,p1为混合交通流中右转机动车占比;p2为混合交通流中行人占比;γ1为右转机动车受干扰程度;γ2为行人受干扰程度.


(4)
(5)

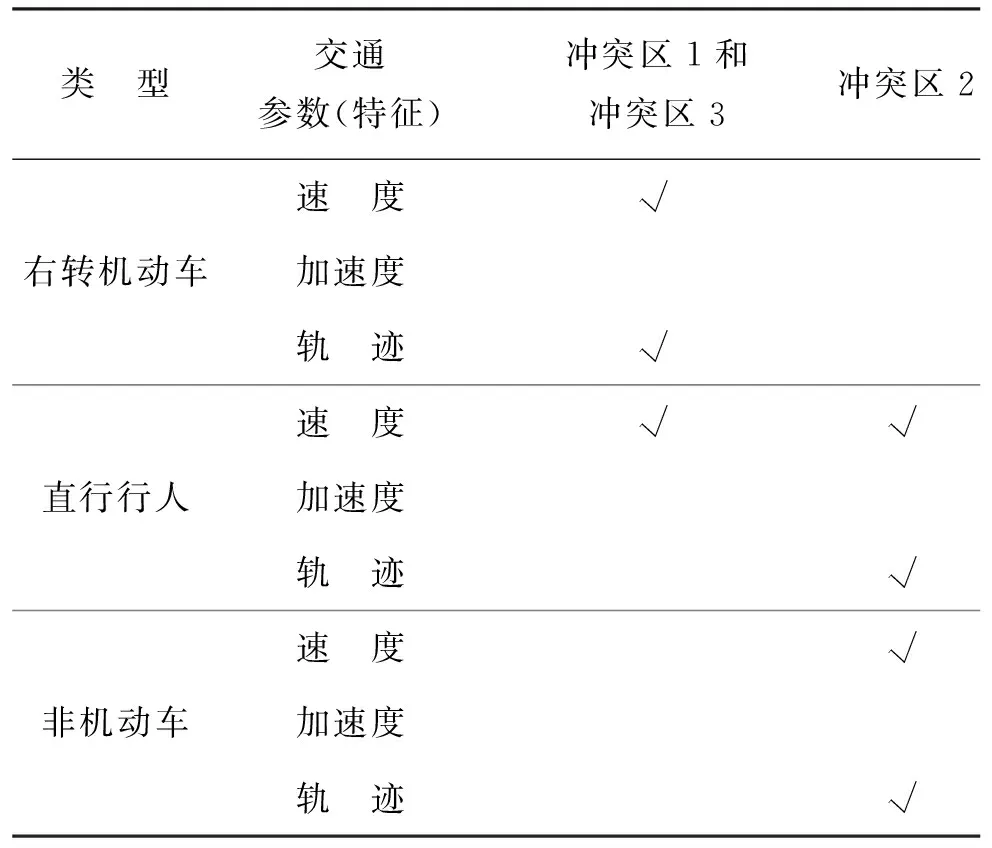
表1 交通参数变化情况Table 1 The change of traffic characteristics
因此,观测时段内冲突区1和冲突区3的秩序度K为
(6)
2.2 冲突区2的秩序度
周期i内冲突区2的秩序度Wi为
(7)
其中,α1为行人受干扰程度;α2为非机动车受干扰程度;ρ1为混合交通流中行人占比;ρ2为混合交通流中非机动车占比.
(8)
(9)

因此,观测时段内行人与行人冲突的秩序度W为
(10)
行人与非机动车冲突秩序度计算方法与行人与行人冲突时的计算方法相同,但参考标准值不同.
秩序度值可以表征人行横道上各个交通流遵守秩序的程度,以周期为单位,对观测样本进行秩序度计算,计算所有周期的累计频率,取对应20%、40%、60%及80%处的秩序度值对秩序度进行等级划分,如表2.
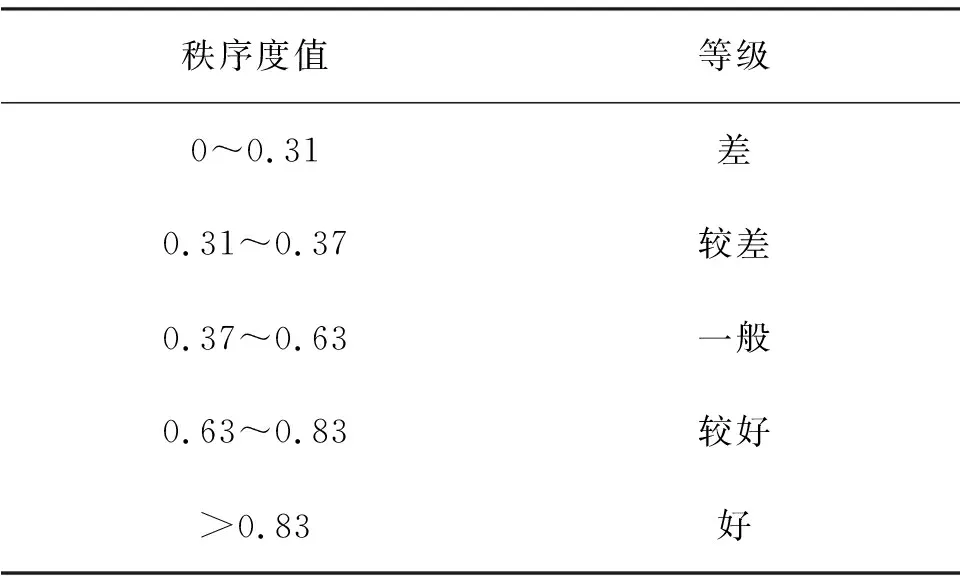
表2 秩序度值对应等级Table 2 The corresponding grade description
3 实例计算
本研究以北京市朝阳区双龙交叉口南北向人行横道为例计算,该交叉口南北向人行横道长度约为46 m,信号周期2 min 25 s,其冲突区域划分如图7,冲突区3包含2条右转车道.拍摄08∶00—09∶00的交叉口视频,取其中连续15 min,根据实际观察以及经验,设定冲突区1右转机动车通过时间参考标准值为4.0 s,转弯半径参考标准值为15 m,行人通过时间参考标准值为8.0 s;冲突区2行人通过时间参考标准值12.0 s,自行车通过时间参考标准值8.0 s, 电动自行车通过时间参考标准值5.0 s,三者轨迹的路程位移比参考标准值均为1;冲突区3中内侧右转车道右转机动车转弯半径参考标准值9.8 m,通过冲突区时间参考标准值3.5 s,外侧右转车道转弯半径参考标准值15 m,通过冲突区时间参考标准值4.0 s,行人通过标准时间6.8 s.
该时段共包含7个完整周期,以第1个周期中冲突区3为例,所测得混合交通流相关参数如表3,观察发现该时段内人行横道上冲突区域1混合交通流流量相对小,冲突少;而冲突区2和冲突区3混合交通流之间的冲突更加严重.每个周期秩序度计算结果如表4.显然,该时段内冲突区1的秩序度整体处于较高水平,其值较为稳定,冲突区2和冲突区3的秩序度较低且波动明显,说明该时段内冲突区1比冲突区2和冲突区3更有秩序,与肉眼观察结果基本一致.
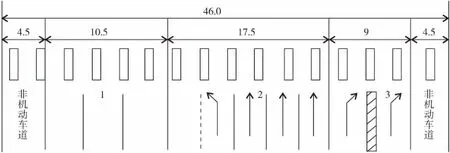
图7 冲突区域划分(单位:m)Fig.7 Conflict regions partition(unit:m)
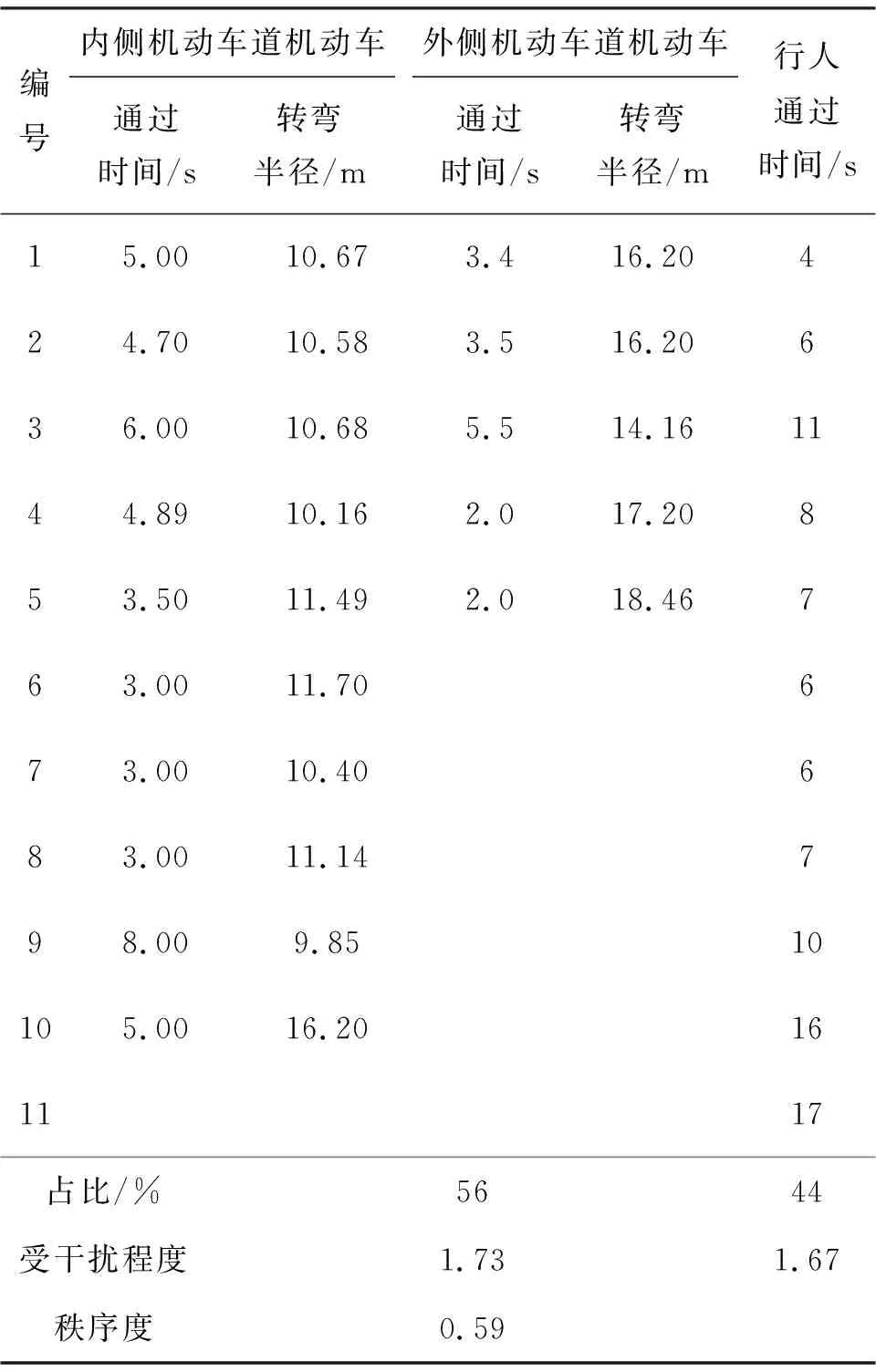
表3 秩序度计算过程Table 3 Order level calculating procession
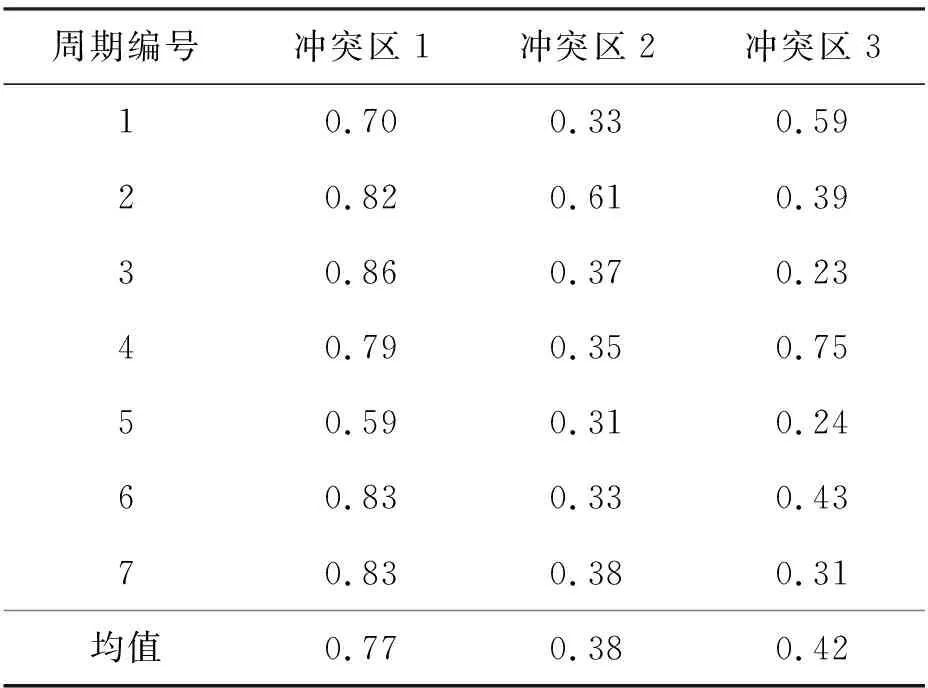
表4 秩序度计算结果Table 4 Order level calculating results
5 结 论
综上所述,本研究认为
1)人行横道上行人与行人、非机动车之间的冲突带来的影响包括:降低行人和非机动车的过街速度、延长过街时间;使行人和非机动车的过街轨迹产生横向波动.冲突对行人和非机动车加速度未造成明显影响.
2)人行横道上右转机动车与行人冲突带来的影响包括:行人过街速度降低、过街时间延长;右转机动车行驶速度降低、转弯时间延长;冲突对行人的轨迹和加速度、右转机动车的加速度未造成明显影响.
3)本研究通过观察人行横道上发生各类冲突时每种交通流交通特性的变化,建立针对人行横道的秩序度模型,该模型可有针对性地计算出各个冲突区域的秩序度,帮助管理者和规划者判别人行横道及其各区域的交通状况,确定管理、规划和优化方案,在条件受限(如成本控制和不可封路)但交叉口迫切需要改善的情况下,还可通过计算实施方案的优先级,实行部分改造和优化,有效降低成本,提高效率,以较低的投入成本得到最优的交通状态.
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
中国交通信息化(2022年5期)2022-07-23
现代青年·精英版(2022年3期)2022-04-06
新传奇(2021年32期)2021-09-22
中国人民公安大学学报(自然科学版)(2020年4期)2021-01-07
中国人民公安大学学报(自然科学版)(2018年2期)2018-01-14
西南交通大学学报(2016年3期)2016-06-15
中国工程咨询(2016年1期)2016-02-14
汽车文摘(2015年11期)2015-12-02
小天使·四年级语数英综合(2015年4期)2015-04-20
