二维立体匹配模型及其数值解法
2018-11-17 02:50王春艳朱华平胡鹏辉
计算机工程与应用 2018年22期
王春艳,朱华平,胡鹏辉
武汉理工大学 理学院,武汉 430070
1 引言
立体匹配是计算机视觉领域的重要研究课题之一,其主要目的是获取立体图像对的空间相同点坐标,进而从二维图像获取空间场景的深度信息并进行三维重建。目前,该领域的研究热点和难点之一是,提出适用于左右匹配点不全在同一条极线上,即极线校准不精确问题的通用模型[1],以及如何克服该模型对应能量泛函中数据项的非凸性,避免陷入局部最优,进而得到全局最优解的方法。云挺等[2]利用极线考虑立体图像对匹配点在不同相对位置下的数据项,适用于几乎所有的图像对,对提出的能量泛函应用梯度下降法求解。但是该模型需要计算极线方程,且使用的算法容易陷入局部最优,在迭代过程中还需要对图像对进行插值计算。因此这种模型难以广泛应用,特别是在设备参数未知的情况下。Rudin等[3]提出连续全变分正则化模型,为克服该模型数据项的非凸性,Pock等[4-5]引入未知函数的示性函数,将原变分问题改写为高一维空间中的凸问题,然后利用对偶公式表示为鞍点问题,最后利用原始对偶近似点的方法求全局最优解,避免了用欧拉法求解全变分出现分母为零的情况。然而该模型仅能计算一维视差的情况,意味着仅考虑了左右匹配点极线在水平线上的情况。
本文重点研究了二维立体匹配模型及其数值解法。基于标准的笛卡尔理论,将二维立体匹配模型表示为四维空间上的变分问题。与一维模型不同的是,二维模型标准化后仍是非凸的,因此需要对非凸性变分问题的数据项进行松弛。利用对偶理论中的双共轭函数对其进行对偶化,改写为二维原始对偶立体匹配模型。基于该模型与鞍点结构优化模型的相似性,从而使用一阶原始对偶算法[6]求解该模型。
2 模型的建立
2.1 一维立体匹配模型
一维立体匹配模型[3]可以表述为下面的变分问题:

其中u:Ω→A是未知函数;Ω⊆R2表示图像区域;是函数u的取值范围;x=(x,y)T表示图像坐标。假定函数u满足第二边界条件。
式(1)的第一项表示正则项,用来平滑解u。第二项表示数据项,其值表示在点x处当视差值为u时的匹配代价。
模型(1)对应的离散形式为:


在文献[4]中,利用未知函数的示性函数对模型进行凸表示:

得到与一维模型(1)等价的高维问题:

然后利用对偶公式,得到等价的鞍点问题:

上述对偶模型的离散形式为:

之后利用原始对偶近似点算法[7]进行求解。
2.2 二维立体匹配模型
传统的立体匹配模型通常是在一个维度上进行搜索,对立体图像对校准精度要求很高,当达不到这个要求时,得到的视差图像精度不高。为能处理这个问题,在一维模型中加入另一维度的视差搜索函数,得到变分问题:

模型(2)对应的离散形式为:

不难看出,一维模型的视差仅由x方向视差决定,二维模型的视差由x、y两个方向的视差决定,考虑了极线校准不精确情况,可以处理匹配点在任意相对位置的情况。
3 模型的凸表示
本文将对提出的二维模型进行凸表示,使之成为鞍点问题。首先利用标准的笛卡尔理论改写二维立体匹配模型(2)为高维空间中的变分问题。然后利用双共轭函数,对正则项和数据项分别进行对偶表示。
定义1二值函数定义为:

易知φ、φ的可行集为:

上面定义了如何由u、v得到φ、φ。反过来,若已知 φ、φ,可由式(7)、(8)得到 u、v:

上面是关于u、v和φ、φ的关系。接下来将用φ、φ来表示变分问题(2),目的是把变分问题改写为凸的变分问题。
首先使得变分问题在凸集范围内求解,也就是要把φ、φ可行集(5)、(6)凸松弛,得到:

定理1变分问题(2)等价于高维的变分问题:
变分问题(9)最优解可以通过式(7)、(8)表示为变分问题(2)的最优解。
证明首先问题(2)正则项可以分别由φ、φ表示,利用推广的Co-area公式,得到:

这里∇x表示仅对3自变量函数进行x的梯度运算。
其次用 φ、φ 改写问题(2)数据项,从式(3)、(4)可得。求解φ、φ在变量α、β的导数,则有:


将式(10)、(11)、(14)代入变分问题(2)便可得到定理1。证毕。
与一维变分问题不同的是,这里变分问题(9)仍为非凸的,求解模型得不到最优解。关于其非凸性有如下结论。
性质变分问题(9)关于φ、φ是凸的,当且仅当对于任意点 (φ,φ),(ξ,ψ)∈D ,有(φα-ξα)⋅(φβ-ψβ)≥0 。
证明能量泛函(9)是凸的,也就是对任意的θ∈[0,1],有下式成立:

由于梯度算子及1范数的凸性,上式等价于:
也就是对任意点 (x,α,β)∈Ω×A×B 满足 (φα-ξα)⋅(φβ-ψβ)≥0。上述为等价条件。证毕。
易知,关于变分问题凸的充要条件不是自然成立的。因此将对数据项进行凸松弛[8-9],用其双共轭函数来近似。首先对双共轭函数[10-13]进行说明。
函数 f(x)关于x的Legendre-Fenchel共轭函数为:

函数 f(x)关于x的Legendre-Fenchel双共轭函数为:

若 f(x)关于 x 是凸的,则 f∗∗(x)=f(x);否则,f∗∗(x)是 f(x)的最小凸包(凸包络)。
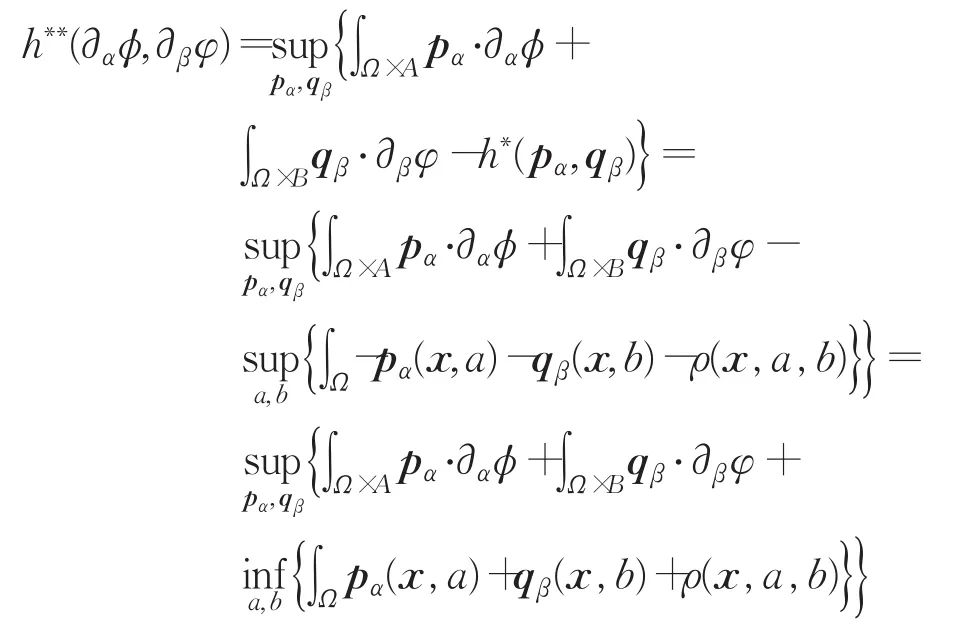
定理2变分问题(9)的最小凸包为:

其中


其次,对于数据项进行对偶化的处理。由性质可知,数据项是非凸的,因此用双共轭函数仅仅可以得到最小凸包。若数据项表示为:

则其共轭函数为:

由Dirac Delta函数的性质可知,若u(x)=a,v(x)=b,则有:

数据项的双共轭函数为:
为使上式成立且计算简便,使得下式成立:

上式成立的一个条件便是:

即对任意的 x、α、β,有:

若满足上述条件(16),则有:

把对偶变量 p、q满足的条件整合,则有定理集合G成立,把正则项和数据项代入变分问题(9)则有定理成立。证毕。
上述对偶模型的离散形式为:

其为典型的鞍点问题,接下来将对该问题进行求解。
本文的最终目的还是解决二维变分问题(2),下面说明怎样由凸松弛后变分问题得到的最优解得到变分问题(2)的最优解。假设松弛后变分问题的最优解为φ∗、φ∗,通过下式得到:

要注意的是,这里u、v并非变分问题(2)的最优解,仅仅是在一定范围的次最优解。
不难看出,这里已经建立鞍点问题(9)与模型(2)的对应关系,即鞍点优化模型与二维立体匹配模型的对应关系。
从二维模型(2)的定义以及其等价的鞍点形式可知,当其中y方向视差v=0,二维模型就变为一维模型,与二维模型等价的鞍点问题也变为与一维模型等价的鞍点问题。由此可以得出,二维模型是一维模型的推广。
4 模型的原始对偶算法
文献[6]提出了一阶原始对偶算法,用来解决鞍点结构的优化问题。因此可以直接得到关于凸松弛后变分问题(15)的算法,如下所示。
算法1
(1)初始化:选取可行集 D×G 中变量 (φ,φ)×(p,q),且令,迭代步长为 τ,σ>0 且满足
(2)迭代:
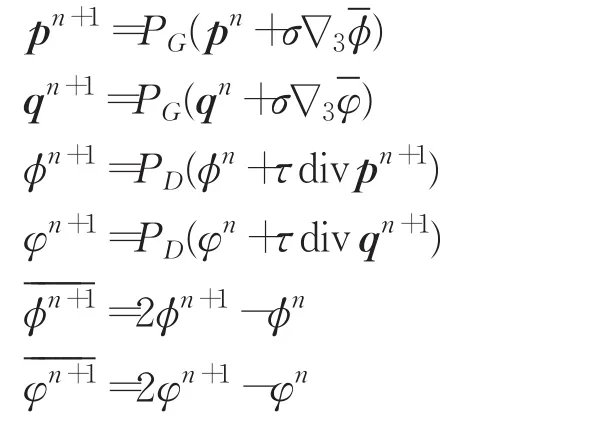
(3)计算能量泛函(2)的值,当迭代的能量差小于给定的阈值停止迭代;否则,令n=n+1,转(2)。
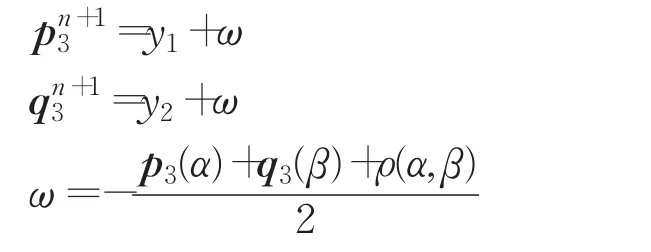
算法1中P表示投影算子,PD是向集合D投影,PG是向集合G投影。原始变量集投影算子PD用简单的截断函数实现。对偶变量集PG用下式进行投影运算,关于x有:

关于 pα、qβ的投影就是求下述最优问题,对于每点x,α,β∈Ω×A×B有:

本文中梯度算子用向前差分进行近似,散度算子用向后差分进行近似。因此关于初始化迭代步长关系式中,梯度算子的范数为‖‖∇=12。
5 实验结果与分析
为测试并评价本文算法,在Matlab 2017a平台上,对文献[14]提供的Middlebury立体视觉2014版数据库中15种场景的1/4像素双目图像进行实验,并对实际获取的真实场景图像进行了求取视差的实验与结果分析,采用一维模型[2]和本文的二维模型进行比较。
5.1 标准库实验结果
用全部标准库中的立体图像对进行测试。表1给出本文结果与一维立体匹配在Middlebury网站的测评结果。本文给出两种误差,分别为非遮挡误匹配率(nocc,%)和所有区域误匹配率(all,%),误差阈值为1,并且给出了算法运行时间的对比。实验数据中存在关于亮度变化的立体图像对,对于有光照影响的图像对采用文献[15]中的关于梯度的匹配代价作为数据项。
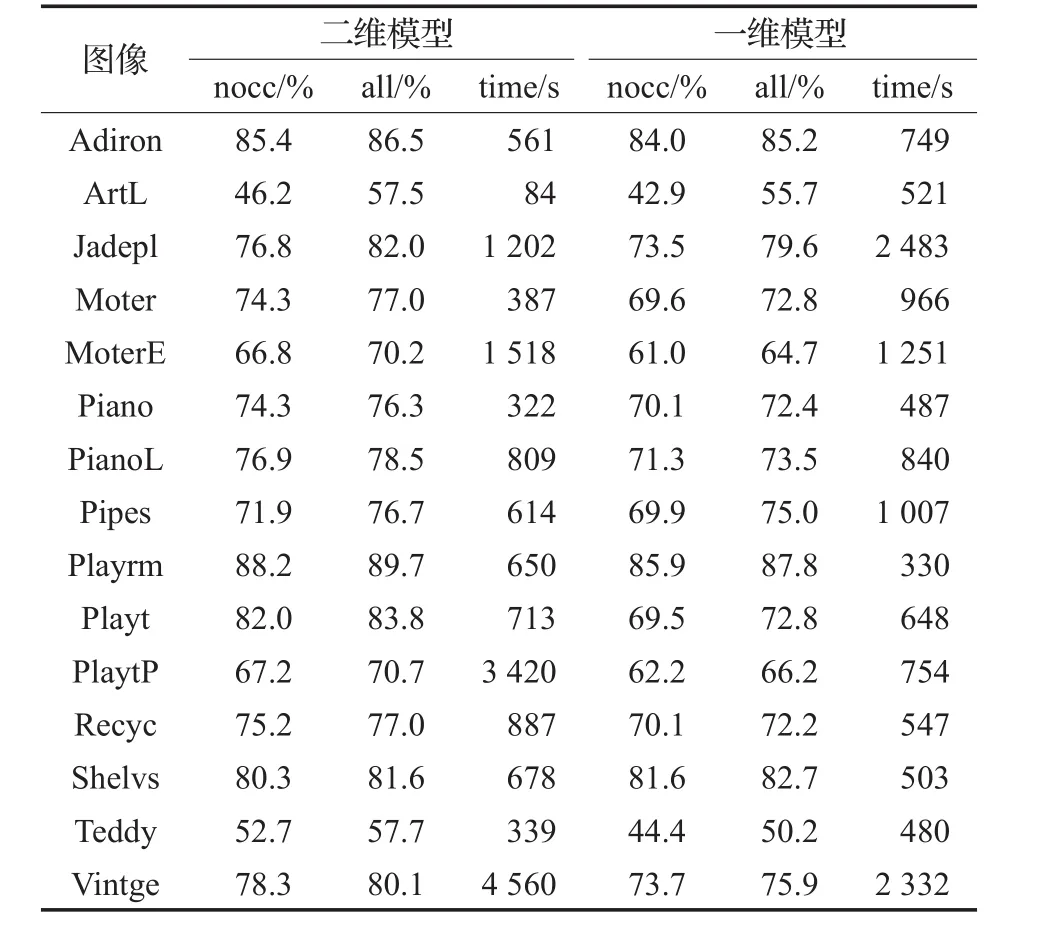
表1 图像精度及收敛速度比较
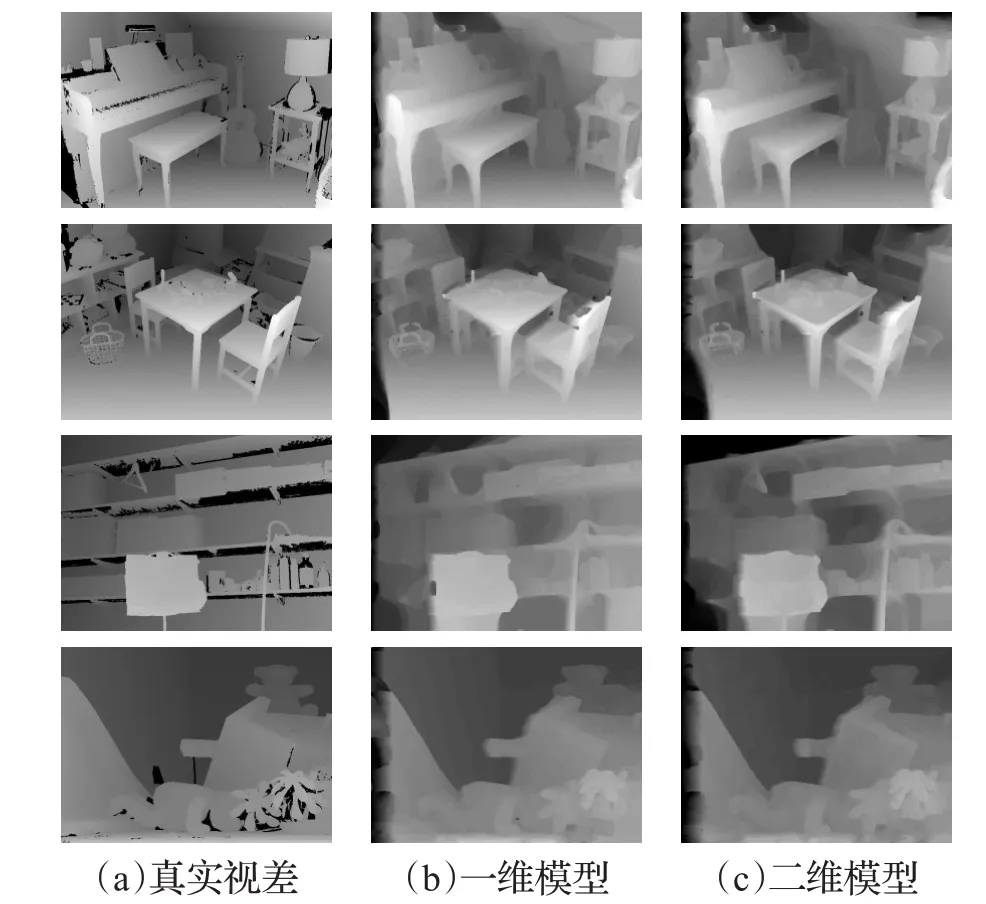
图1 部分标准库图像实验结果对比图

图2 真实场景
其中精度由错误率衡量,收敛速度由迭代时间进行度量,由数据可以得到二维模型比一维模型相比,nocc精度降低4.69%,all精度降低4.11。这是因为在二维模型中存在凸松弛,尽管是最小凸包,但是与真实最优解存在误差。关于迭代速度,一维模型、二维模型有快有慢。
图1给出部分标准库图像实验对比图,可以看到二维模型视差图像视觉效果和一维模型相当。
二维模型可以处理标准库经校准的图像,且效果与一维模型相差无几。
5.2 实拍场景图像的实验
为了验证算法的实用性,实验模拟了室内环境,用普通移动拍照设备得到4组场景图,并进行了缩放处理,得到实验所用立体图像对。然后用本文模型和一维模型得到的视差图像进行对比,如图2。
每组立体图像对均有明显的极线偏差。对本文模型与一维模型得到的视差图进行对比,可以发现本文模型可以处理极线校准不精确的图像,在细节部分更加清晰,得到的视差图像效果更好。一维模型处理真实场景图像变得很困难。
6 结束语
本文针对一维立体匹配模型极线校准不精确的问题,提出了二维立体匹配模型及其原始对偶算法。通过实验证明,二维模型可以处理标准库中图像。相比一维模型,虽然由于其中数据项的松弛,二维模型的精度平均会降低4%~5%,但是对于现实场景的图像对进行实验,二维模型可以处理真实场景图像,与一维模型相比,得到的视差图更加精确。其中松弛方法导致的标准图像库中实验精度下降问题,是下一步研究的课题。
猜你喜欢
湘潭大学自然科学学报(2022年1期)2022-04-11
计算机与数字工程(2021年6期)2021-06-29
计算机与生活(2019年11期)2019-11-12
成都工业学院学报(2019年3期)2019-11-06
科技与创新(2019年14期)2019-08-12
上海师范大学学报·自然科学版(2018年3期)2018-05-14
经济数学(2017年4期)2018-01-18
电脑知识与技术(2016年15期)2016-07-04
浙江大学学报(工学版)(2016年11期)2016-06-05
应用科技(2015年5期)2015-12-09