
基于自抗扰理论的PMSM 电流环控制算法
2018-10-20 06:56王福欣郜世杰
上海船舶运输科学研究所学报 2018年3期
王福欣, 郜世杰
(1.上海船舶运输科学研究所航运技术与安全国家重点实验室,上海200135;2.海军驻广州地区军事局,广州510000)
0 引 言
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)伺服控制系统一般采用三闭环结构(即速度环、位置环和电流环),其中电流环作为最内环结构,用来保证定子电流对电流指令的快速准确跟踪,其控制性能直接影响着位置环和速度环的控制性能,对于整个电机的控制而言具有重要作用。目前在PMSM的磁场定向控制中,通常采用比例-积分-微分(Proportion-Integral-Derivative,PID)控制器分别对旋转坐标系的d轴和q轴进行控制,控制过程简单,容易得到实践[1]。
随着电路电子技术的发展,PID控制器在控制电流方面逐渐暴露出电流波动性较大、抵抗扰动的能力较差和稳定性不足等问题。近年来,越来越多的电流控制算法被提出。例如:文献[1]提出双PI解耦控制的方法,可提高控制器的鲁棒性,但双PI参数众多,很难调节到最优;文献[2]提出用前馈解耦控制代替电流反馈解耦控制,可消除电流误差,提高跟踪性能,但受电机参数的准确度影响,鲁棒性较差;文献[3]提出用模糊PID控制器代替传统的电流环PID控制器,可解决参数实时整定的问题,但模糊PID控制器的参数主要是靠经验获得的,且运算量太大;文献[4]提出电压前馈解耦与模糊PI相结合的方法,使得控制器具有自适应参数调节能力,但参数同样依赖于经验,控制效果很大程度上取决于经验水平;文献[5]和文献[6]提出采用内模和滑模的结构进行电流控制,可提高系统的响应速度和稳态性,但也存在稳态误差;文献[7]提出基于模型预测控制的电流控制策略,可有效提高电流的动态性能,但控制器的实现比较复杂。
本文以PID控制的PMSM模型为基础,提出一种基于自抗扰理论的PMSM电流环控制算法,采用自抗扰控制器(Active Disturbances Rejection Controller,ADRC)[8-11]取代PMSM q轴电流环的PID控制器,减小超调,增强抵抗扰动的能力,提高稳定性。通过仿真试验验证该算法的正确性。
1 ADRC的设计及分析
ADRC的设计主要包括安排过渡过程部分的设计、扩张状态观测器部分的设计和误差反馈部分的设计等3部分。由此,ADRC主要由跟踪微分器、扩张状态观测器和非线性误差反馈等3部分组成。为降低系统的复杂度,减少计算量,控制器一般采用简单的一阶ADRC,可建立ADRC模型为

式(1)~式(3)中:v0为目标信号;v1为系统的跟踪信号;y为实际的测得的信号;e0为系统实际行为与期望目标之间的差值;e1和e2为扩张状态观测器估计的变量误差;r为非线性函数的时间尺度;z1和z2为扩张状态观测器扩张生成的状态变量;β01、β02和β为扩张状态观测器的参数;u0(t)为扩张状态观测器输出的中间变量;u(t)为最终输出的控制变量;b0为放大系数。
上述函数fe=fal(e(t),α,δ)的表达式为

式(4)中:δ为该函数的线性段的区间长度;α为该非线性函数的参数,0<α<1;sign为符号函数。
在MATLAB/Simulink中设计一阶ADRC模型(见图1)。
给定初始信号值为0、阶跃时间为1、阶跃值为1.0的信号进行仿真运算,结果见图2。
从图2中可看出:在0~1 s内阶跃值一直为0;在给定阶跃值1.0处出现约9%的超调;在2.7 s时达到稳定的阶跃值1.0。
佳能PowerShot D30在这组对比中并不起眼,但是它25米的下潜深度击败了除尼康W300之外的所有对手。2米防摔以及零下10摄氏度的防冻能力也相当可观,不过不像同组中的奥林巴斯TG-5以及理光WG-50,D30完全没有防冲击设计。佳能PowerShot D30还拥有全高清视频拍摄以及GPS定位能力。D30在颇具圆滑线条的机身前后加上了两片增加摩擦力的胶皮以保证足够的握持稳定性,逻辑合理的操控布局以及足够大的按键尺寸使得这台相机成为这次测试中操作效率方面最优秀的机型。考虑到水下摄影师往往需要隔着厚厚的手套进行操作,佳能的操控设计为它赢得了更高的分数。

图1 一阶ADRC模型
作为对比,给定相同的阶跃信号,用PID控制器进行处理,结果见图3。

图2 经ADRC处理后的阶跃信号响应图

图3 经PID处理后的阶跃信号响应图
从图3中可看出:在0~1 s内阶跃值一直为0;在给定阶跃值1.0处出现约12%的超调;在2.7 s时达到稳定的阶跃值1.0。
通过对比图2和图3可知,经过ADRC处理后的图形比经过PID处理后的图形更加稳定,超调优化效果尤为明显。
2 PMSM电流环的ADRC模型设计
2.1 基于PID的PMSM矢量控制模型设计
以PMSM的矢量控制[12-16]为基础,在MATLAB/Simulink中建立仿真模型,该模型主要由位置和速度检测模块,轴、速度环PI检测器,坐标变换模块,SVPWM模块和逆变模块等4部分组成(见图4)。
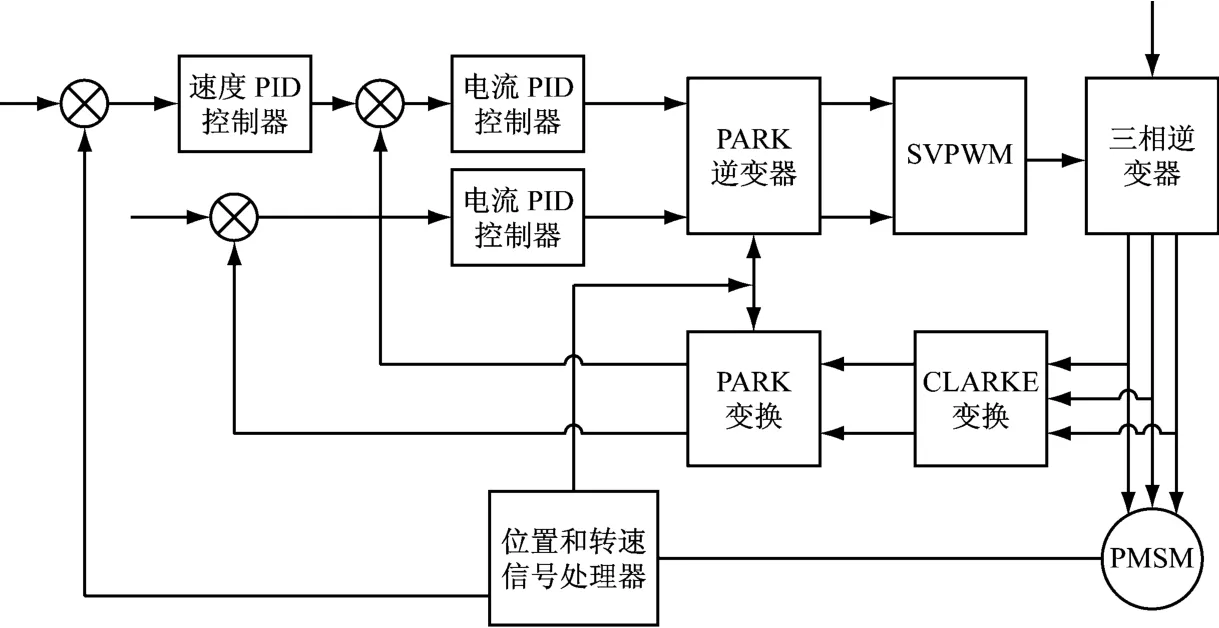
图4 PMSM的矢量控制图
PMSM模块[17-19]的定子绕组共包括A相、B相、C相的输入和负载转矩输入Tm等4个输入端,大体上按照星形连接。输出参数包括:定子三相电流iA、iB、iC,A;转子机械位置角θThetam,rad;电磁转矩Tm,N·m;转子角速度ωr,rad/s。
2.2 基于ADRC的PMSM矢量控制模型设计
用一个一阶ADRC控制器替换PMSM矢量控制图中q轴的PID控制器,进行PMSM q轴的ADRC伺服控制设计,在MATLAB/Simulink中建立模型图见图5。

图5 PMSM q轴的ADRC伺服控制设计模型图
3 与PID控制结果对比分析
仿真试验的参数设置为:电压U=300 V;电动机功率P=1.1 k W;定子绕组电阻R=2.875Ω;d相绕组自感与q相绕组自感相等,Ld=Lq=8.5×10-3;转子磁通量Ψf=0.175 Wb;转动惯量J=8.0×10-4kg·m2;黏滞摩擦因数F=1.0×10-3;极对数Pm=4。
给定转速1 000 r/min,在t=0时启动PMSM,初始负载为3 N·m;在t=0.04 s时,负载由3 N·m突变为5 N·m;系统仿真运行时间为0.16 s,得到电流曲线、转矩曲线和转速曲线对比见图6~图8。

图6 P M S M仿真电流图对比

图7 P M S M仿真转矩图对比

图8 PMSM仿真转速图对比
从图7中可看出,PMSM q轴的ADRC伺服控制设计仿真生成的转矩图与基于PID控制器的PMSM矢量控制仿真生成的转矩图相比,波动幅度更小,波动时间和达到稳定值的时间更短,二次波动幅值更小,稳定性和抗干扰性能更好。
从图8中可看出,PMSM q轴的ADRC伺服控制设计仿真生成的转速图与基于PID控制器的PMSM矢量控制仿真生成的转速图相比,波动时间更短,响应速度更快,两者抵抗负载变化的能力都比较好,转速变化可忽略不计。
4 结 语
本文在PID控制PMSM的基础上,提出将自抗扰理论应用到PMSM电流环的控制算法中,可优化PMSM的性能,为解决工程实践中的问题提供参考。仿真结果表明,该控制算法具有以下优点:
1)研究是基于ADRC控制理论开展的,安排有过渡过程,能减少超调量,提高稳定性;
2)用到的ADRC可成功替代PMSM q轴电流环的PID控制器,优化控制性能;
3)电流波动更小,能提高电机的稳定性;
4)设计简单,可应用到复杂的环境中。
猜你喜欢
火力与指挥控制(2022年6期)2022-07-25
中国科技纵横(2021年22期)2022-01-08
计算机仿真(2021年3期)2021-11-17
佳木斯大学学报(自然科学版)(2021年3期)2021-07-05
湖北工业大学学报(2021年2期)2021-04-28
汽车维修与保养(2021年11期)2021-03-11
北京航空航天大学学报(2020年10期)2020-11-14
航空发动机(2020年3期)2020-07-24
电子技术与软件工程(2020年17期)2020-02-02
中国测试(2018年9期)2018-05-14
