拳击后手直拳最大出拳速度影响因素的研究
2018-07-24 03:35:30宋兆铭
中国学校体育(高等教育) 2018年1期
宋兆铭 ,赵 勇 ,张 辉
(1.四川警察学院,四川 泸州 646000 ;2.安徽省体育局,安徽 合肥 230001; 3.北京体育大学重竞技教研室,北京 100084)
运动技术的本质是一个竞技项目在规则许可下所特有的动作序列,精湛的技术都建立在标准和正确的“动作”基础之上[1]。但可惜的是国内传统运动训练理论与方法一直以来以线性科学模型作为其理论基础,追求简明的因果关系。而作为动态、多元复杂的非线性人体系统,这种线性研究范式只适用于一定范围内,很多情况下很难用线性这种确定性的方法来描述[2]。
当前关于拳击出拳速度的研究仍主要以一元线性的方法为主,其主要结论是拳击击打技术主要由下肢蹬伸、躯干扭转和手臂前伸击打三个动作环节组成[3-6]。但不同的学者对人体不同环节对出拳力量贡献率上有不同的认识。Mack等指出上肢鞭打对出拳速度的提高起主要的作用,其中,上肢鞭打与直拳和勾拳出拳速度的相关性分别为0.391和0.380,下肢与直拳和勾拳出拳速度的相关性分别为0.103和0.099[3]。苏彦炬等(2013)将16名拳击运动员后手直拳最大出拳速度分别与前、后脚最大力量/体重,蹬地发力达到最大力量峰值的时间,快速力量指数/体重出拳速度进行相关分析,发现前、后脚蹬地最大力量/体重,快速力量指数/体重与出拳速度之间直线拟合度最高,均呈显著正相关,蹬地达到最大力量峰值的时间与出拳速度二次曲线模型拟合度最高,呈曲线关系(P<0.01);同时,其结论认为在后手直拳击打的过程中,前、后脚积极蹬地发力蹬地最大力量和发力速度对出拳速度具有显著影响[4]。
首先,值得肯定的是此研究从研究范式上采用了非线性研究,修正了过去线性研究的不足;但同时也应看到,拳击后手直拳的出拳过程具有复杂性,其最大出拳速度受人体各环节多因素的影响[3,5-6]。因此,从在多元复杂视角,整体、全面地评价人体各环节对拳击后手直拳出拳最大速度的影响很有必要。
后手直拳是2013国际拳联新规则下运动员在比赛中主要得分的拳法[7,12],居于运动员进攻技术体系的核心地位[8]。分析后手直拳出拳过程中人体各环节与出拳速度的关系,能够较为全面、客观地反映人体各环节对出拳速度影响的大小,可以为教练员、运动员科学正确地进行拳击后手直拳的专项训练提供理论依据。因此,本研究运用Motion-Anlysis红外光点运动捕捉测试系统和2块Kistler测力台,采集拳击后手直拳出拳过程中人体各环节的运动学和动力学的相关数据,并在多元复杂视角下整体评价人体各环节对拳击后手直拳最大出拳速度的影响,确定拳击后手直拳最大出拳速度的关键影响因素,为拳击专项技术的训练提供理论建议与参考。
1 研究对象与方法
1.1 研究对象 依据研究对象来源的可行性,本研究共选取北京体育大学竞技体育学院拳击专项班男生15人,武警体工队15人,共30人(正架);并于2017年12月11-15日在北京体育大学科研中心一楼,采用预约方法,开展测试(表1)。
表1 研究对象基本情况一览
1.2 研究方法
1.2.1 文献资料法 以“拳击”“后手直拳”和“最大拳速”为关键词,在“中国知网”“百度学术”和“百链云”数据库查阅相关文献18篇,比较和借鉴相关研究的理论、方法、数据处理以及研究假设和构想,为本研究相关结论的提出提供引证。
1.2.2 实验法
1.2.2.1 实验动作 后手直拳(右手):在基本姿势状态下,右脚内旋发力,脚后跟外翻,依次带动膝关节、髋关节、前肘关节,以重心投影线为中柱转动,身体由右侧转到正对前方时,右手臂顺势向前方击打,接近目标时右手大拇指旋内运动,瞬间握紧拳头,左脚掌内扣,身体由于左转带来的转动,上体呈交叉型,击打结束后迅速还原。
1.2.2.2 实验仪器 Motion-Anlysis(运动学)和Kistler测力台(动力学),数据采集由红外采集软件Cortex同时触发采集(图1)。
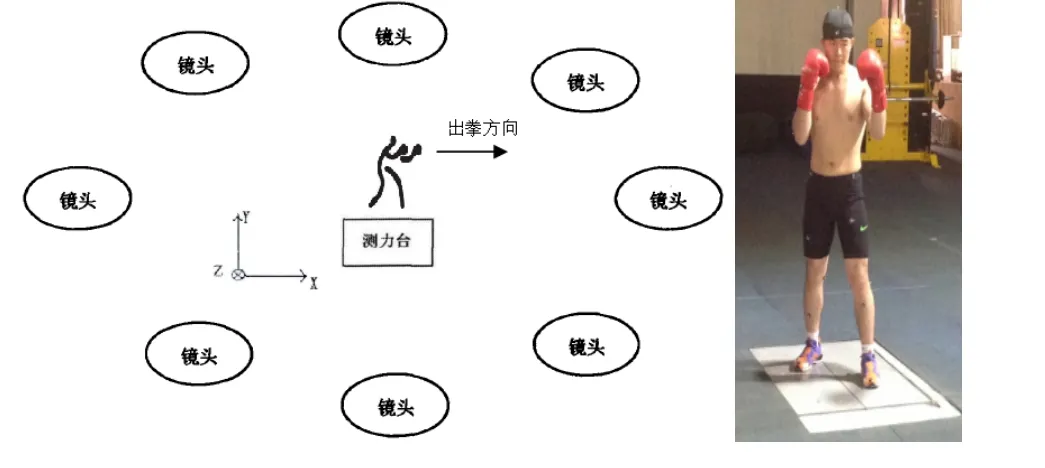
图1 测试现场模
1.2.2.3 实验过程 a标志点安置:根据Helen-Heys模型,在实验对象体表相应位置贴29个反光标志点(图2)。
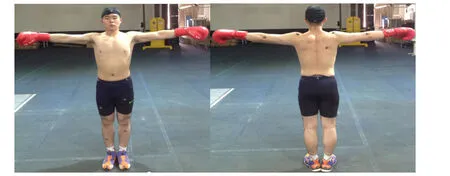
图2 反光标志点位置
b实验测试:测试时,受试对象尽全力完成后手直拳3次打靶,相关实验人员记录,数据分析使用最快一拳。1.2.2.4 评价参数 a动作阶段划分:见下表(表2)。
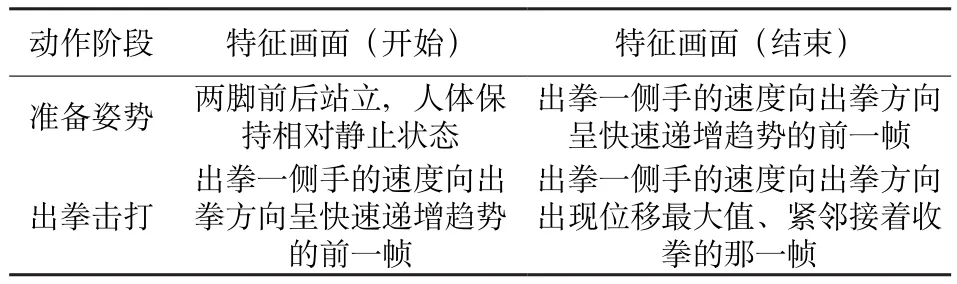
表2 后手直拳出拳过程中阶段划分的特征画面
b运动学:应用Cortex分析软件对原始数据进行处理,获得*.ts和*.kin文件。具体指标见下表(表3)。
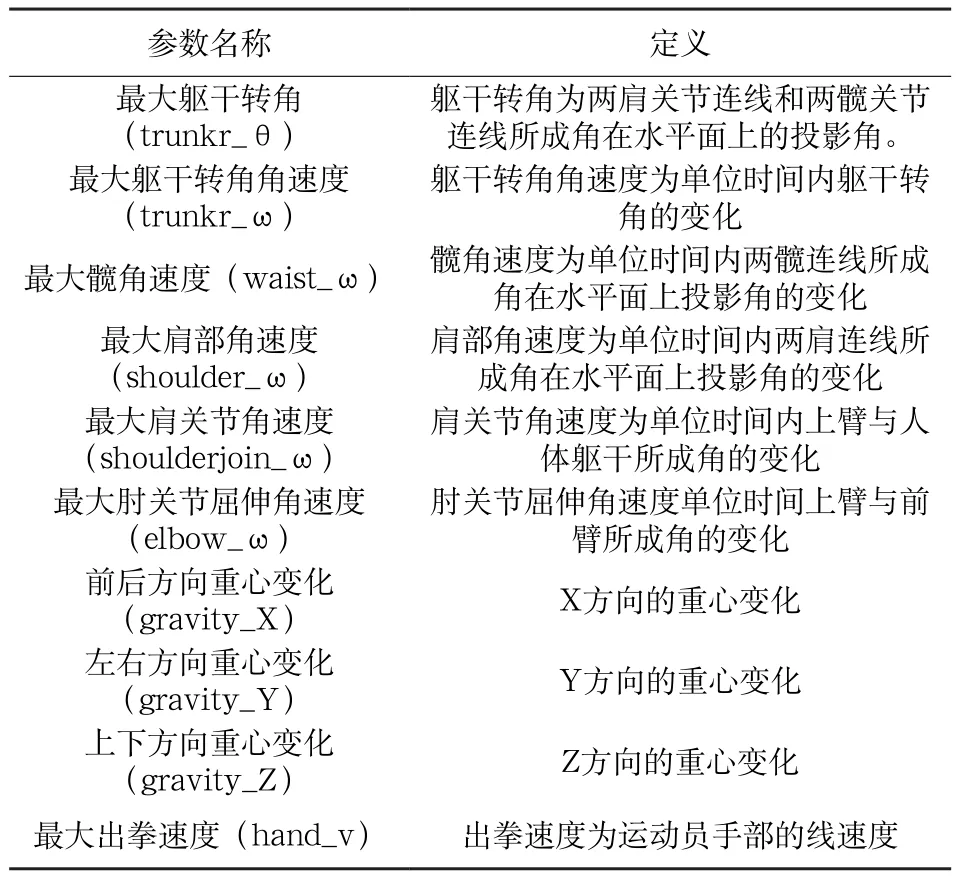
表3 运动学参数的定义及其计算公式
c动力学:应用Cortex分析软件对原始数据进行处理,获得*.forces文件。同时,为了消除个体重量不同所造成的影响,把蹬地最大合力和水平方向的力除以实验对象的体重,即:/Weight、/ Weight。具体指标见表4。
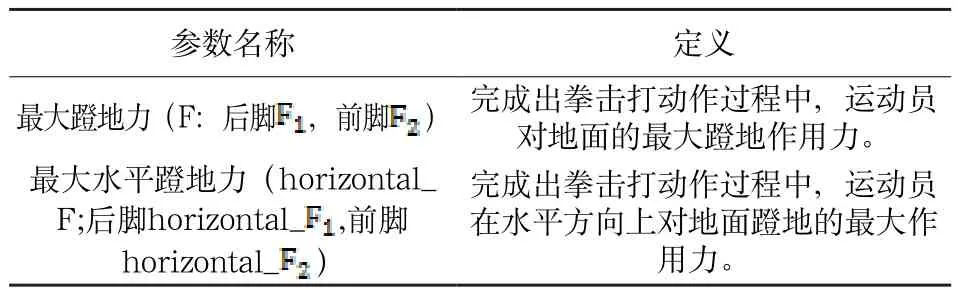
表4 动力学参数定义及其计算公式
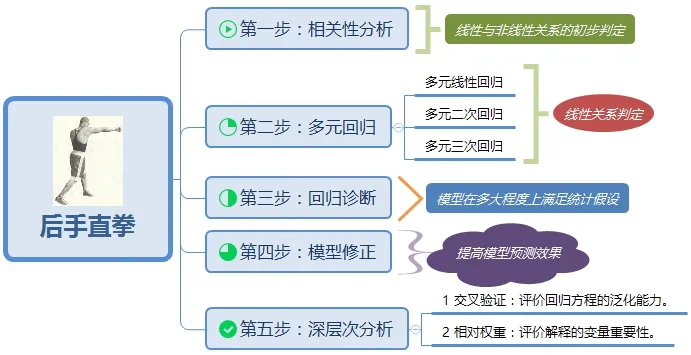
图3 后手直拳最大出拳速度关键影响因素分析步骤
1.2.3 数理统计法 采用双变量相关(Pearson),分析因变量与各自变量以及各自变量之间的密切程度,为下一步的多元回归分析筛选变量;采用多元逐步回归(Stepwise),对自变量进行筛选,确定对因变量(后手直拳最大出拳速度)的关键影响因素,从而建立多元回归方程模型,具体分析步骤见图3,分析软件使用R软件。
2 结 果
2.1 相关性分析 从后手直拳最大出拳速度与人体各环节数量关联趋势图(图4)可以首先看出,后手直拳最大出拳速度(hand_v)与后脚最大水平蹬地力(horizontal_F1)、最大肩部角速度(shoulder_ω)、最大髋角速度(waist_ω)、最大躯干转角角速度(trunkr_ω)、最大肘关节屈伸角速度(elbow_ω)、前后方向重心变化(gravity_X)、左右方向重心变化(gravity_Y)、上下方向重心变化(gravity_Z)呈显著性正相关;其次,从图形趋势来看,后手直拳最大出拳速度与人体各环节部分变量间存在一定的线性相关,但也与部分变量存在不成直线的非线性相关,且各变量间存在密切相关。因此,应进行多元逐步回归分析,分析各相关因素对后手直拳最大出拳速度影响的程度,从而确定影响后手直拳最大出拳速度的关键因素。
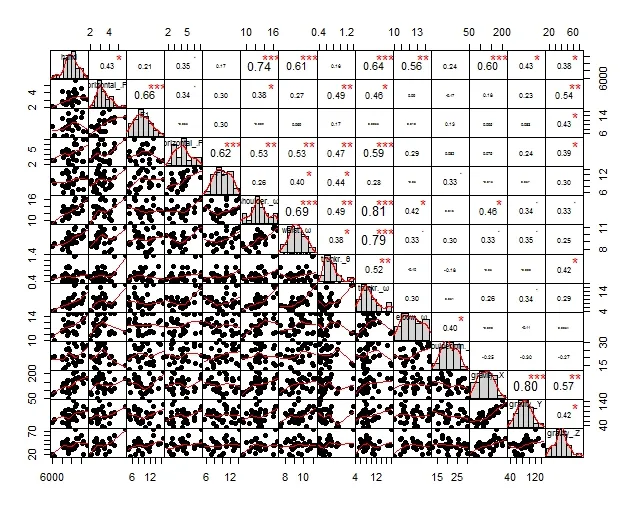
图4 后手直拳最大出拳速度与人体各环节数量关联趋势
2.2 回归模型建立 由相关性分析可知,影响最大出拳速度的因素有多个,因此选取对最大出拳速度具有显著性相关的指标进行回归建模,采用逐步多元回归分析的方法解决多重共线性问题,将变量一次性引进,并逐步检验,剔除失去统计学意义的变量[9]。建立最大出拳速度的多元线性回归、多元二次回归及多元三次回归,其回归分析结果见表5。
表5中,多元线性回归的拟合优度调整R2最接近于1,回归拟合程度最高[9]。这表明,后手直拳最大出拳速度(hand_v)关键影响因素有:前后方向重心变化(gravity_X)、最大肘关节屈伸角速度(elbow_ω)、最大躯干转角角速度(trunkr_ω),且后手直拳最大出拳速度各解释变量呈线性关系(图5)。

表5 后手直拳最大出拳速度的多元线性回归、多元二次回归及多元三次回归分析结果一览
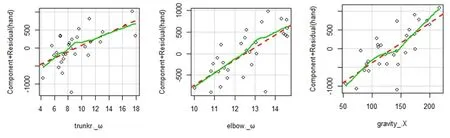
图5 后手直拳最大出拳速度多元线性回归成分残差
2.3 回归模型诊断 数据的无规律性或者错误设定了预测变量与响应变量的关系,都将会使模型产生巨大的偏差,导致模型实际预测效果差[9]。表6中,经拟合优度的检验可以看出,自变量解释因变量变异程度的调整为R2=0.7747,表明方程拟合度较好,具有一定应用价值;经对回归模型的假设检验可以看出,F=34.25,P<0.000,说明至少一个自变量的回归系数不为0,回归模型有意义;经对回归方程的进一步检验可以看出:通过Durbin-Watson检验可以看出,D.W=1.610,在1<D.W<4限定范围内,残差独立,因此序列不存在一阶自相关性。
图6表明,正态Q-Q图上的点基本落在45度角的直线上,这表明随机误差项服从正态分布;Residuals vs Fitted(残差图与拟合图)可以看出残差值与预测值没有系统关联,模型包含数据中所有系统方差,即:因变量与自变量呈直线相关关系;Scale-Location(位置尺度)图显示水平线周围的点分布形状呈随机分布,这表明满足方差齐性假设;Residuals vs Leverage(残差与杠杆)图显示观测点18离直线较远,靠近置信区间边缘,且残差值(真实值-预测值)较大,这表明观测点18可能是离群点,且可能导致发模型预测效果不佳,应进一步对该点进行判定。
采用R语言car包outlierTest()函数,并依据观测点18最大残差值的显著性来判断是否是离群点,若显著则删除该点。
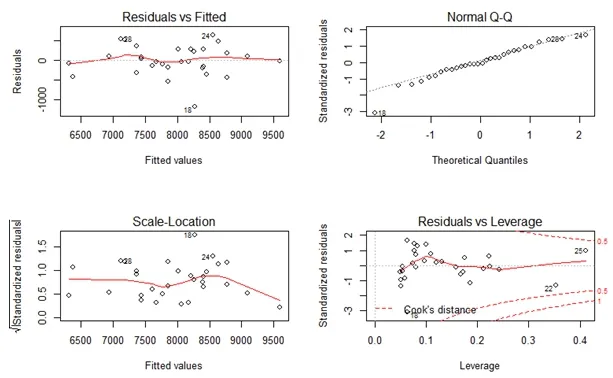
图6 后手直拳最大出拳速度多元线性回归方程诊断
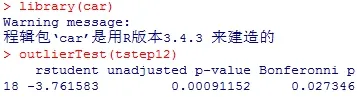
图7 后手直拳最大出拳速度多元线性回归方程离群点
图7 表明,观测点18被判定为离群点(P=0.027346),应删除该点进行方程修正。
2.4 回归模型修正 表6中,相对于多元线性回归1,多元线性回归2的调整R2=0.8499,回归拟合程度有所提高(0.0752);图8表明,残差随各自变量取值的水平改变的范围在-2<<+2以内,波动范围基本保持稳定,无离群点。这表明,删除离群观测18点可以提高数据集对于正态假设的拟合度,使模型预测效果更好。
2.5 回归模型验证 由于研究样本量较少,同时也为了充分利用数据集对算法效果进行测试,本研究采用k-折交叉验证(k-fold CrossValidation)对回归模型在实际应用中的表现进行检验,即:将数据集A随机分为k个包,每次将其中一个包作为测试集,剩下k-1个包作为训练集进行训练。这样获得k个预测方程,记录k个保留样本的预测表现结果,然后求其平均值。软件实现采用R语言bootstrap包中的crossval()函数实现k重交叉验证。图9结果表明,回归方程的实际应用能力属中等水平,但仍具有一定的应用价值(R2=0.769)。

表6 最大出拳速度的多元线性回归模型修正分析结果一览
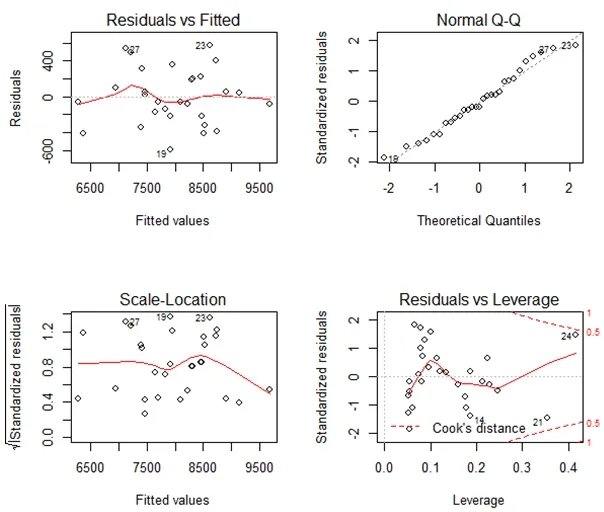
图8 后手直拳最大出拳速度多元线性回归方程诊断
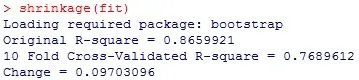
图9 后手直拳最大出拳速度多元线性回归方程验证
2.6 变量相对权重 采用相对权重(relative weight)评价预测变量对后手直拳最大出拳速度的影响力。相对权重法可以对所有可能的子模型添加一个预测变量引起的R平方平均增加量的一个近似值,并通过各个预测变量对模型方差的解释程度来判定每个预测变量的重要性。软件实现采用R语言relweights()函数实现相对权重的计算。图10表明:各个预测变量对模型方差的解释程度(R2=0.866),gravity_.X(前后方向重心变化)解释了37.31%的R平方,elbow._ω(最大肘关节屈伸角速度)解释了34.68%,trunkr._ω(最大躯干转角角速度)解释了28.01%。根据相对权重法的重要性顺序为:gravity_.X﹥elbow._ω﹥trunkr._ω。
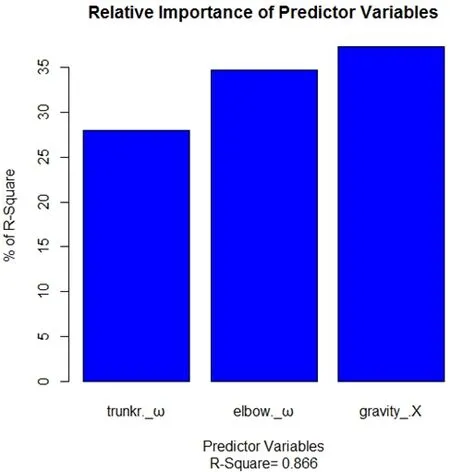
图10 后手直拳最大出拳速度多元线性回归方程变量相对权重
3 讨论与分析
拳击的出拳动作是由上肢、躯干、下肢共同作用的复杂活动[10],相关研究认为下肢对出拳力量起主导作用[4-5],下肢力量对于出拳力量的贡献率要高于上肢和躯干;但同时,也有研究认为拳击的出拳动作更加符合鞭打原理[3,10],并指出上肢鞭打对出拳力量起主导作用。所以,不同的研究在人体各环节对出拳力量贡献率上的结论有所不同。因此,正确认识人体各环节对出拳力量贡献率的影响,明晰出拳时人体运动链的关键环节,这对拳击后手直拳专项技术训练是十分必要的。
本研究结果显示,在后手直拳出拳过程中,增大X方向的重心变化(gravity_X),可以显著提高出拳速度。人体是一个活的生物有机体,能自主地通过人体各环节间的相对运动,有意识地在一定空间范围内,改变人体重心的位置,使平衡得以在最佳姿势的方式下建立和维持[11]。重心是重力的作用点,人体全部环节(整个人体)所受重力合力的作用点就是人体总重心[12]。从支撑面边缘到重心(重力作用线)的水平距离决定了重心要移动多远才能使该姿势不稳定。如果重心超出了支撑面,则重心倾向于使人体向支撑面边缘倾斜[13]。因此,支撑面的水平重心的变化对人体姿势的稳定性与灵活性起到重要的作用,且重心移动的方向总是与环节移动方向一致。拳击属于同场格斗对抗的项目,为了减少人体暴露的面积、对抗前后方向的冲击力以及完成出拳击打的需要和步法移动的需要,拳击基本姿势采用前脚内扣站立,增加侧向维度,以此来增加支撑面积,两脚前后脚拉开与肩同宽,增加前后维度,这既考虑到平衡性、稳定性,又兼顾到移动的灵活性,从而使支撑面达到了稳定性与灵活性的最好折中。拳击后手直拳的出拳是在基本姿势的基础上开始的。在出拳时,由于两脚被地面约束限制,每一脊柱节段均围绕其下端关节突关节和椎间盘运动,所以躯干运动环节的转动支点位于下端。因此,在出拳的过程中人体重心前移,重心接近支撑面的前缘,减小了人体向出拳方向的稳定性,为后手直拳技术动作的完成提供了较好的灵活性。与此同时,由于人体重心的前移,重心移动的方向与出拳方向一致,也使更多的人体质量处于向前运动状态[14],增加了近端环节的质量[15],增加了躯干转动的惯性[16],从而进一步提高了出拳的速度。
本研究结果显示,拳击的出拳动作符合上肢鞭打原理,提高人体最大躯干转角角速度(trunkr_ω)和最大肘关节屈伸角速度(elbow_ω),可以显著提高出拳速度。上肢鞭打原理指出环节由近端向远端依次加速和制动,远端环节的速度来于近端环节的制动将运量传递[15],由于近端环节的质量大于远端环节,从而使得远端环节获得较大的速度。首先,躯干转角角速度反映了拳击后手直拳出拳过程中躯干转动速度的快慢。在后手直拳出拳过程中,躯干的质量远远大于“拳”的质量。因此,较快的躯干转角角速度有利于对下肢环节能量的利用,有利于躯干近端环节向肩关节远端环节的能量传递[17]。同时,在拳击后手直拳出拳的过程中,由于上臂围绕肩关节转动、前臂绕肘关节转动,手处于游离状态,所以上肢运动环节的转动支点位于近侧端。因此,肘关节的快速伸展,可以减少上肢绕纵轴的转动惯量,从而增加前臂内旋的角速度,增加了肘关节肌群的弹性能量的积累及其利用[18]。
综上,在后手直拳出拳过程中,要在注意人体重心前移的同时,强调人体的整体发力,重视躯干快速转动对手臂能量传递的正向作用,并且通过肘关节的快速伸展(翻肘、屈伸、压腕)等一系列动作最终将动量集中到“拳”上,从而提高出拳速度,提高鞭打效果。
4 结论与建议
4.1 结论 1)在后手直拳出拳过程中,增大X方向的重心变化(gravity_X),可以显著提高出拳速度;2)提高人体最大躯干转角角速度(trunkr_ω)和最大肘关节屈伸角速度(elbow_ω),可以显著提高出拳速度。
4.2 建议 在进行后手直拳训练时,应增大人体重心的前移,使重心移动的方向与出拳方向更一致,同时促使更多的人体质量处于向前运动状态,增加近端环节的质量与躯干转动的惯性,从而进一步提高出拳速度;应重视上肢力量训练,特别是快速力量与爆发力训练,从而增强肘关节的快速伸展能力与肘关节肌群弹性能量的积累及其利用的能力;应重视躯干力量训练,积极提高人体核心区力量,从而保证出拳时正确的身体姿势和合理的重心变化,保证躯干的主动发力与快速转动对整体运动链能量传递的效率,以期达到出拳速度与鞭打效果的最优。
猜你喜欢
灌篮(2020年9期)2020-11-24 05:36:02
诗选刊(2019年9期)2019-11-20 10:24:01
山西青年(2018年22期)2018-01-24 20:24:51
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
火控雷达技术(2016年1期)2016-02-06 02:18:01
长江丛刊(2015年22期)2015-11-17 11:09:09
医学研究杂志(2015年8期)2015-06-22 14:00:56
中国铁道科学(2015年4期)2015-06-21 06:46:06
中国康复理论与实践(2015年7期)2015-05-09 08:31:46
军事体育学报(2014年3期)2014-02-27 16:00:10