
重型车辆防侧翻控制研究
2018-07-19 07:33韩雪雯陈江生
机械设计与制造 2018年7期
韩雪雯,何 锋,陈江生
(贵州大学 机械工程学院,贵州 贵阳 550025)
1 引言
重型车辆作为交通运输的重要工具,由于其具有质心高、载重量大等特点,在高速转向和变道等极限工况下,易发生侧翻,给人员和财产造成重大损失。据美国国家道路交通安全局(NHTSA)统计数据显示,在所有车辆事故中虽然侧翻事故仅占1.7%,但由侧翻事故所引起的乘员受伤达3.9%、死亡高达9%[1]。
国内外针对主动悬架和主动横向稳定杆[2-4]等防侧翻控制开展了大量研究,但这些控制需要额外施加主动控制器,成本较高。目前通过差动制动控制减小车辆的横摆角速度,提高车辆的横摆稳定性是研究的热点[5]。文献[6]建立26自由非线性动力学模型,对所设计的差动制动防侧翻控制系统在紧急避让工况下仿真,结果证实了所设方案的可行性并有效防止了车辆侧翻。文献[7]通过线性二次静态输出反馈和参数的敏感性降低方案设计了一种鲁棒控制器,仿真结果表明所提出的方法有效地防止了车辆侧翻。文献[8]使用横摆力矩和主动后轮转向设计了模型预测开关控制器,仿真结果提高了车辆防侧翻能力和路径跟踪能力,并证实了开关控制器的有效性。文献[9]设计了基于差动制动和半主动悬架系统的控制器,结果有效降低车辆的侧倾角,改善车辆的抗侧翻能力。设计了基于差动制动的模糊滑模控制器。Simulink建立三自由度模型,被控车辆选用Trucksim软件中的重型车辆模型,以横摆角速度跟踪误差定义积分形式的切换函数,采用模糊控制方法减轻滑模控制存在的抖振问题,将其应用到差动制动防车辆侧翻,使用Trucksim中自带的极限工况仿真试验,结果提高了车辆在行驶中的抗侧翻能力,保证车辆在极限工况下良好的操纵稳定性和路径跟踪能力。
2 三自由度动力学模型
对重型车辆简化作如下假设:(1)车辆纵向车速为恒定值;(2)忽略转向系统,前轮直接以等值转角位输入;(3)不考虑空气动力和滚动阻力;(4)忽略轮胎回正力矩的影响且各个车轮机械特性相同;(5)悬架和轮胎均为线性,且二者平行。重型车辆三自由度动力学模型,如图1所示。

图1 车辆三自由度模型Fig.1 Model of 3 DOF for Heavy Vehicles

横摆运动方程:

侧倾运动方程:

式中:m—整车质量;ms—簧载质量;h—侧倾中心到质心的距离;Φ—侧倾角;δ—前轮转角输入;Ff、Fr—前轴、后轴所受侧向力;Iz—绕z轴线的横摆转动惯量;Ix—簧载质量绕x轴线的等效转动惯量;rd—横摆角速度;a—质心到前轴的距离;b—质心到后轴的距离;ay—车辆侧向加速度;c—悬架等效侧倾阻尼系数;k—悬架等效侧倾角刚度。
利用三自由度模型对车辆侧倾预测较为精确,可得到车辆稳态下各个参数的状态变量。
建立如下动力学方程:
侧向运动方程:
3 防侧翻控制策略
3.1 差动制动原理
差动制动主要通过控制车辆某个车轮上的制动力,产生相应的目标横摆力矩,改变车辆因急转向产生的侧倾运动,使车辆的横摆和侧倾运动得到有效的控制[10]。对不同的车轮单独进行差动制动时,横摆力矩随着施加的制动力变化而变化。通过对车辆前外轮施加制动力,所产生的横摆力矩与侧向力减小所产生的横摆力矩方向相同,与车辆运动方向相反,可降低侧向加速度,因此选择对前轴外侧车轮施加制动力的方式实现车辆的稳定性控制。
3.2 侧翻因子与制动轮选取逻辑
对于重型车辆,定义车辆左右侧轮胎垂直载荷之差与垂直载荷之和的比值为横向载荷转移率LTR,表达式为:

式中:Fzl、Fzr—左右侧车轮垂直载荷。
绝对值LTR越小车辆稳定性就越好。用LTR来设置侧翻因子,当LTR为0.85时启动差动制动。制动轮选取逻辑,如表1所示。

表1 制动轮选取逻辑Tab.1 The Selection Logic of Braking Wheel
3.3 模糊滑模控制器
三自由度模型根据Trucksim输入的纵向速度和方向盘转角,输出车辆稳态下理论横摆角速度rd,利用Trucksim软件建立被控车辆模型,输出控制所需的实际横摆角速度r,将r与rd的差值作为跟踪误差定义积分形式切换函数,以切换函数作为模糊器的输入,如图2所示的控制策略,当检测到重型车辆|LTR|值超过侧翻因子0.85时,根据控制算法求解出车辆所需的目标横摆力矩,并对前外轮施加运算出来的制动力,减小重型车辆的侧倾趋势,提高车辆的稳定性。
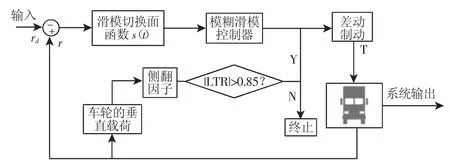
图2 控制策略Fig.2 Control Strategy
根据前面建立的三自由度重型车辆模型,得到重型车辆的防侧翻控制横摆力矩微分方程:

可见,重型车辆差动制动控制是一个一阶的单输入单输出系统,输入为差动制动所需的目标横摆力矩M,输出为重型车辆的横摆角速度r,Ff、Fr转向盘转角引起的扰动。
三自由模型和Trucksim车辆模型输出的横摆角速度r为控制变量,采用带有积分形的滑模控制方法对横摆角速度控制,其跟踪误差为:

定义带积分形式的切换函数:

式中:r、rd—实际的横摆角速度和理论的横摆角速度;ξ—正的设计参数,决定着滑模面的斜率。
如果滑模控制处于理想状态,则 s(t)=s˙(t)=0,即:

根据式(6)~式(8)得到切换函数,模糊控制器的输入为切换函数,输出为目标横摆力矩M,构成一个单输入、单输出的模糊控制器,输入输出的论域均为{-6,6},模糊集均为{负大(NB),负小(NS),零(Z0),正小(PS),正大(PB)},采用三角函数和高斯型隶属度函数作为输入输出隶属度函数,反模糊化采用重心法,各条规则的权重均为1。模糊控制器设计如下所示5条模糊规则:
(1)if(s is NB)then(Mis PB);
(2)if(s is NS)then(Mis PS);
(3)if(s is Z0)then(Mis Z0);
(4)if(s is PS)then(Mis NS);
(5)if(s is PB)then(Mis NB)。
模糊控制目的使切换函数s为0,即实际横摆角速度接近理想横摆角速度,以s的大小决定目标横摆力矩。
4 联合仿真分析
4.1 Trucksim非线性整车模型
车辆在实际行驶时受较多非线性因素的影响,因此在Trucksim中建立与实车行驶状况接近具有载重的重型车辆(LCFVan)作为被控车辆。模糊滑模差动制动防侧翻控制器中,Trucksim整车模型输出为横摆角速度、侧倾角、质心侧偏角等,将模糊滑模控制得到的目标横摆力矩转化为制动力作为Trucksim整车模型的输入。
4.2 鱼钩转向工况
利用MATLAB/Simulink与Trucksim软件联合仿真,以Trucksim中鱼钩转向作为方向盘转角输入,(1~1.4)s保持直线行驶,1.4s时方向盘鱼钩输入,对应转角为 294°,2.5s时反打方向盘,对应转角为294°直至仿真结束维持方向盘转角不变。设定重型车辆初始速度v为60km/h,路面附着系数为μ为0.85,仿真运行时间为10s,对比加装防侧翻控制器前、后两种情况下车辆的稳定性。
车辆在无控制和模糊滑模差动制动防侧翻控制两种情况下侧倾角、质心侧偏角和横摆角速度的仿真对比,如图3所示。从鱼钩转向仿真结果明显看出无控制的车辆在3s之后各个参数趋于增大,车辆一侧车轮离地车辆发生侧翻,有模糊滑模差动制动防侧翻控制的车辆侧倾角控制在7deg之内,同时质心侧偏角和横摆角速度也都控制在5deg、27deg之内,3s之后车辆恢复稳定行驶直至仿真结束。

图3 鱼钩转向输入响应Fig.3 Fishhook Input Response
结合鱼钩转向方向盘变化从图4、图5可以看出(0~1.5)s时车辆进行方向盘鱼钩输入下的转向运动,对应的横向载荷转移率LTR值低于预定的侧翻因子0.85,1.5s之后方向盘反方向急转向,在3s时无控制的车辆侧翻,而有模糊滑模差动制动防侧翻控制的车辆控制器起作用对车轮施加制动力,明显看出LTR值逐渐减小。如图6所示,有模糊滑模差动制动防侧翻控制的车辆在纵向行驶距离内及时回正,说明有模糊滑模差动制动防侧翻控制的车辆不仅改善了车辆的运行轨迹,同时提高了车辆在极限工况下的操纵稳定性。

图4 LTR变化Fig.4 LTR Change
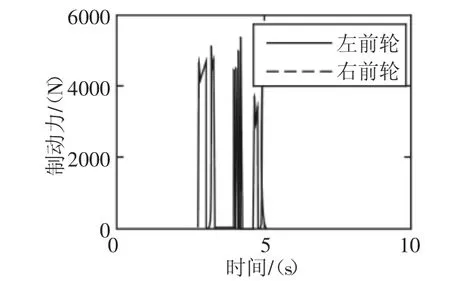
图5 施加制动力Fig.5 Applied Braking Force

图6 车辆行驶轨迹Fig.6 Vehicle Trajectory
4.3 阶跃转向工况
重型车辆以v为80km/h的初始速度阶跃转向,(1~2)s保持直线行驶,(2~4)s时方向盘阶跃输入,对应转角 δ为 240°,(4~10)s维持方向盘转角不变。路面附着系数μ为1,仿真运行时间为10s。阶跃转向下侧倾角、质心侧偏角、横摆角速度响应,如图7所示。
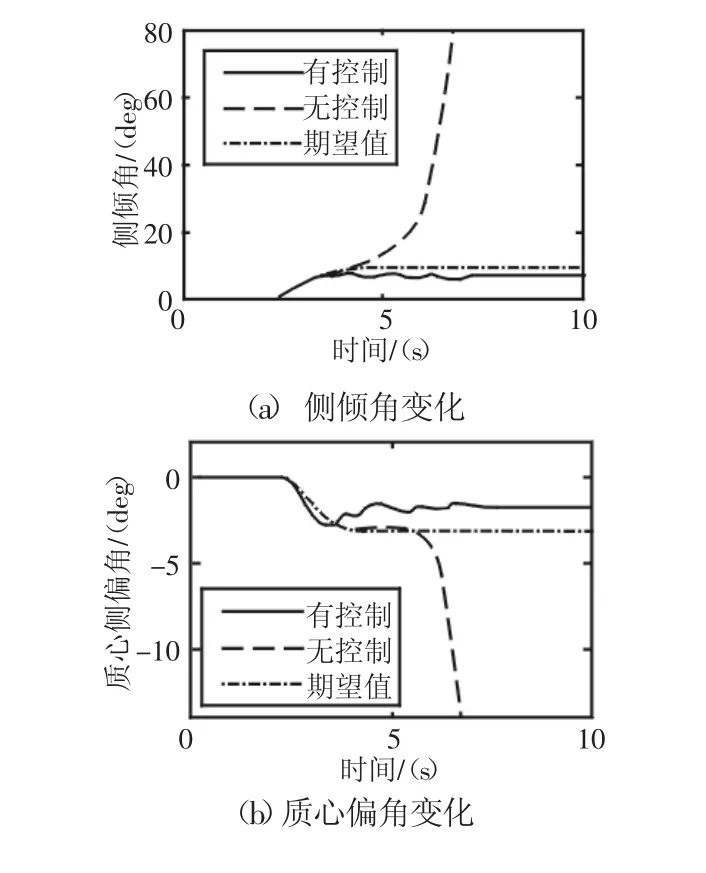
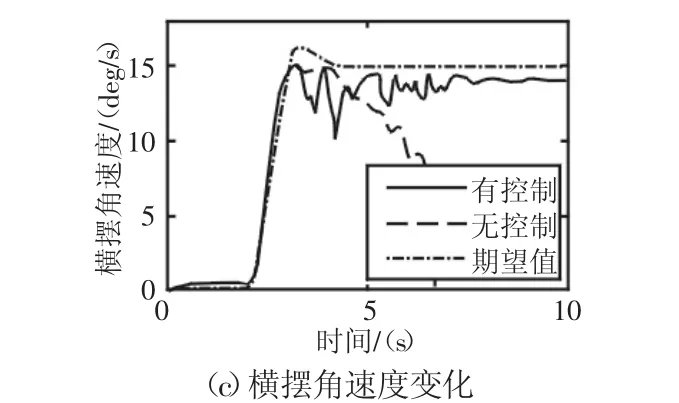
图7 阶跃转向输入响应Fig.7 Step Input Response
由仿真结果可知,没有施加控制的车辆侧倾角、质心侧偏角和横摆角速度在3s时迅速增大,横向载荷转移率(LTR)绝对值达到1,车辆发生侧翻。而有模糊滑模差动制动防侧翻控制的车辆,横向载荷转移率(LTR)高于设定的侧翻因子时,差动制动对车轮施加制动力,车辆的侧倾角控制在10deg之内,质心侧偏角控制在4deg之内且横摆角速度控制在15deg稳定范围内,有效防止车辆发生侧翻。
5 结论
(1)利用Simulink建立了车辆三自由度模型和Trucksim建立了被控车辆模型,经联合仿真结果分析,所建模型模型满足要求。(2)基于差动制动原理设计的模糊滑模控制器,可有效提高了重型车辆抗侧翻能力。(3)极限工况下联合仿真表明,控制器可将车辆侧倾角、质心侧偏角和横摆角速度控制理想的范围内并向期望值靠拢,保证车辆在极限工况下良好的操纵稳定性和路径跟踪能力。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
电子制作(2019年10期)2019-06-17
电子制作(2018年14期)2018-08-21
中学生数理化·高一版(2017年3期)2017-07-08
电子制作(2017年10期)2017-04-18
电子制作(2017年23期)2017-02-02
火控雷达技术(2016年1期)2016-02-06
应用科技(2015年5期)2015-12-09
中国铁道科学(2015年4期)2015-06-21
