
基于概率Hough变换的指针仪表去影算法*
2018-06-05 01:44钟志伟张寿明
传感器与微系统 2018年6期
钟志伟, 张寿明
0 引 言
指针式仪表由于具有抗电磁干扰,精度高等数字式仪表无法取代的优点,工业生产中仍然广泛使用,许多企业为了避免定期派人员对指针式仪表进行检定、记录数据等工作,均实现了仪表自动判读,仪表示值通过机器视觉等技术读取。但工业现场往往存在许多的干扰光源或光源不稳定的情况,对示值读取造成了很大干扰,使得示值偏差较大,甚至无法读取。
针对此情况,本文提出了一种基于Hough概率变化的指针去影,正确判别指针的算法,实验表明:所提方法能够在存在干扰光源,指针出现阴影的情况下正确判读指针位置,提高了系统抗干扰性。
1 系统结构
系统整体原理如图1所示。具体识别步骤为:1) 图像采集;2)图像预处理;3)指针提取;4)指针阴影判别。
2 图像预处理
1)图像灰度化处理。因为摄像头采集到的图像为彩色图像,其占有空间大,影响程序的执行效率,为了后续的图像处理,将摄像头采集到的彩色图像转化成灰度图像,如图2所示。

图2 灰度图像
2)图像锐化。采用基于拉普拉斯的锐化算子对采集的灰度图像进行处理,便于提取指针,突出图像的边缘,算子表达式为
f(x,y)=5f(x,y)-f(x-1,y)-f(x+1,y)-
f(x-1,y-1)-f(x+1,y+1)
(1)
式中f(x,y)为坐标为(x,y)的灰度值,其他以此类推。锐化后的图像如图3所示。
图3 锐化后的图像
3)图像二值化处理。为检测出仪表的指针,比较各算法[1~4]后,采用了阈值化分割的算法,即对锐化后的图像进行二值化,选取合适的阈值进行Hough概率变化,检测出图像中的代表指针的直线。
2.1 图像的分割与指针提取
图像二值化即在0~255中选择一个数值作为阈值,通过选取不同的阈值根据不同的方法,将灰度值小于该阈值的像素的值设为0或者255,0代表黑色;255则代表白色。二值化后的图像如图4所示。

图4 二值化图像
为了更准确地获得代表指针的直线,对图4进行了细化,提取后的图像如图5所示。图中代表指针的直线虽然与左下角的短线错误的连接在了一起,但是并不影响后续的处理。

图5 细化图像
2.2 Hough概率变换提取指针
传统Hough变换将笛卡尔坐标系下的直线y=ax+b映射到极坐标系,其函数关系为
ρ=xcosθ+ysinθ
(2)
式中ρ为直线到坐标原点的距离;θ为直线与x轴的夹角。通过对图像中每一点以θ为横坐标,ρ为纵坐标进行作图,属于同一直线上的点在该平面交于一点,通过寻找交于一点的曲线数量来检测一条直线,越多的曲线交于一点说明该交点表示的直线由更多的点组成。因此,可以通过设定阈值来定义多少条曲线交于一点才认为是一条直线。Hough概率变换也是将图像映射到极坐标系中,不同的是其随机选取图像上的前景点,当曲线的交点数达到设定的阈值,在笛卡尔坐标系下找出该直线L,并输出线段的端点坐标[5]。
2.3 指针阴影判别
通过Hough概率变换能够得到检测出的直线的起点(x0,y0)与终点(x1,y1)坐标,直线的方程表示为
(3)
在无干扰条件下通过检测任意2个不在同一位置的指针可得2个不同的方程,求取2条直线的交点,即为指针的回转中心,其突出的特点是坐标固定不变,因此,当在外界有干扰的条件下,指针存在阴影,或者是其他直线状物体的影子进入图像时,可以通过这些直线与机械调零位置指针的交点来判断该直线是否为阴影,或不相干图像,从而提高系统的抗干扰性,避免程序出现误判,提高示值读取的准确率。该方法可以简单的概括为以下3步:
1)利用Hough概率变换提取出初始位置的指针,并保存该直线方程;
2)提取任意不同于初始位置的指针,并通过式(3)计算2条直线的交点,即回转中心;
3)当检测到图像中出现不止一条同样长度的直线,或者更长的直线时,通过比较该直线与初始位置的的交点坐标与步骤(2)中所求的坐标大小关系比较是否为干扰直线,并输出正确的指针的直线。
本文采用图4所示指针初始位置与图6所示的指针位置获取指针的回转中心。通过人为制造干扰光源,使得二值化图像中出现干扰直线检验算法的可行性。加入干扰后图像如图7所示。

图6 指针转动后的图像
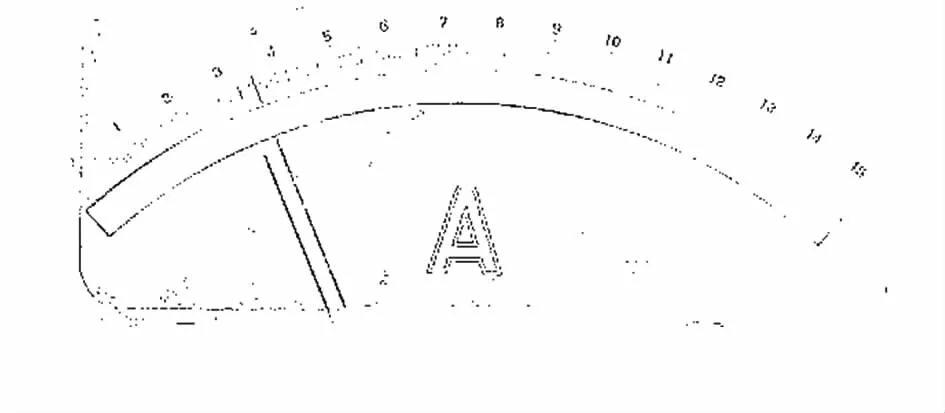
图7 干扰图像
光从仪表左边投射可以看出,图像中出现了指针阴影、许多其他的干扰因素。通过上述算法可求得指针回转中心的坐标为(297,484),以及图7中检测到的直线与指针初始位置的交点1的坐标(295,482)与交点2的坐标(323,525)。回转中心为由图4和图6所示求取的直线交点,在正常无干扰下求得。交点1和交点2是由图7与图4所示求取的直线交点。通过判断交点1、交点2与回转中心的坐标关系即正确判断出代表指针位置的直线,通过将Hough概率变换检测到直线在图中划线可以判断与回转中心坐标距离最近的交点1为正确指针交点。将图4、图6以及图7检测到的直线用直线显示出来,如图8所示,同时也可以通过表1看出,交点1与回转中心并不是严格意义上的相同,这与Hough概率变换检测到的直线与直线交点计算过程中的数值取舍均有关系,但并不影响程序检测的正确性与可靠性。
图8 检测到的直线
实验中通过在不同光照下检验,本文方法均能正确检测出代表正确指针的直线,表现出了很好的抗干扰性。
3 结 论
通过Hough概率变换检测出图像中代表指针的直线,并通过在无干扰的情况下检测指针不同位置时的交点来确定回转中心,并以此点为参考点来检测后续检测到的直线与指针初始位置的交点来判定正确指针的位置。实验表明:方法能够正确检测出指针并提高系统的抗干扰性,在实际的生产应用中具有一定的借鉴意义。
参考文献:
[1] 赵艳琴,杨耀权,田 沛.基于计算机视觉技术的指针式仪表示值的自动判读方法研究[J].电力情报,2001(3):39-42.
[2] 戴亚文,王三武,李金龙.基于图像处理技术复杂仪表的自动识别[J].计量技术,2003(3):33-35.
[3] 陈 彬,金连文.一种仪表指针位置检测的中心投影法[J].计算机应用研究,2005,22(1):246-248.
[4] Alegria E C,Serra A C.Automatic calibration of analog and digital measuring instruments using computer vision[J].IEEE Trans on Instrumentation and Measurement,2000,49(1):94-99.
[5] Matas J,Galambos C,Kittler J.Robust detection of lines using the progressive probabilistic hough transform[J].Comput Vision Image Underst,2000,78 (1):119-137.
猜你喜欢
建筑与预算(2022年5期)2022-06-09
建筑与预算(2022年2期)2022-03-08
软件学报(2020年6期)2020-09-23
学生导报·东方少年(2019年7期)2019-06-11
通信电源技术(2018年5期)2018-08-23
广东第二课堂·小学(2017年9期)2017-09-28
数学学习与研究(2017年11期)2017-06-20
青年时代(2017年3期)2017-02-17
汽车维护与修理(2016年10期)2016-07-10
理科考试研究·高中(2014年3期)2014-04-10
