影像设备引导下椎间孔镜穿刺效果研究
2018-03-01 12:03
中国内镜杂志 2018年2期
(湖北省武汉市中医医院 骨伤科,湖北 武汉 430000)
经皮内镜下腰椎间盘微创切除手术是临床中治疗腰椎间盘突出症的常用手段,多采用后外侧入路,手术过程包括术中目标节段定位-椎间孔穿刺-建立工作通道-髓核摘除[1]。其中最关键的步骤为椎间孔穿刺,该步骤的操作需要临床医师有丰富的开放手术经验,对腰椎相关解剖结构非常熟悉,且需要借助影像设备引导进行[2]。为了避免患者和手术医师进行多次穿刺而长时间暴露在大剂量的辐射下,需要不断改进影像设备的引导效果,精确穿刺位置,避免对神经、血管和腹部脏器等产生不必要的损害[3]。传统的“C”型臂X线机透视具有较高的辐射量,对患者和手术医师均有较大影响,而超声容积引导是指在超声引导中将术前采集的计算机断层扫描(computed tomography,CT)三维数据图像与实时静态声像图像相互融合,并采用电磁场跟踪系统寻找病变位置,其具有无创、实时性好、成像清晰的特点,且无辐射[4-5]。因此,本研究对超声容积导航与“C”型臂X线机透视在腰椎经皮后外侧入路内镜下手术中的应用效果进行了比较。现报道如下:
1 资料与方法
1.1 一般资料
选取2014年1月-2017年1月本院收治的52例腰椎间盘突出症患者为研究对象,本研究已获得我院伦理委员会批准,采用随机数表法将患者分为对照组和观察者,各26例。观察组中,男17例,女9例,年龄18~73岁,平均(36.78±8.43)岁。病程为1~6个月,平均(2.84±1.22)个月。4例L3-4椎间盘突出节段,12例L4-5椎间盘突出节段,10例L5/S1椎间盘突出节段。对照组中,男19例,女7例,年龄19~75岁,平均(35.94±8.19)岁。病程为1~6个月,平均(2.84±1.22)个月。6例L3-4椎间盘突出节段,12例L4-5椎间盘突出节段,8例L5/S1椎间盘突出节段。两组患者的一般资料差异无统计学意义(P>0.05)。具有可比性。
纳入标准:①临床症状为腰痛伴有下肢放射痛的患者;②经CT证实为单纯腰椎间盘突出症的患者;③病变节段为L3-5或L5/S1椎间盘突出的患者;④经保守治疗无效的患者;⑤年龄≥18周岁且自愿参加本项研究的患者。
排除标准:①多节段腰椎间盘突出症患者;②明显腰椎管狭窄的患者;③腰椎滑脱≥25%的患者;④既往脊柱手术史导致脊柱结构不连续或缺损的患者;⑤心功能障碍的患者;⑥严重的精神疾病患者。
1.2 方法
观察组患者采用超声容积导航(Logiq E9超声仪,美国GE公司),对照组患者采用“C”型臂X线机(Brivo OEC 850型,美国GE公司)透视。两组患者术前均进行常规检查,包括:①腰椎CT平扫三维重建;②腰椎正侧位X线片;③腰椎磁共振成像(magnetic resonance imaging,MRI)平扫。
1.2.1 对照组“C”型臂X线机透视。采用GE Brivo OEC 850型C臂机进行扫描,管电流为2.3 mA,管电压为80 kVp,曝光时间为0.1 s/次,记录透视次数和穿刺时间,CT扫描结束后将获得的数据以DICOM格式存储在光盘内。
1.2.2 观察组超声容积导航。采用Logiq E9超声仪(生产厂家:GE公司)进行引导,探头为C1-5-D凸阵探头,频率为4 MHz。将CT扫描得到的三维数据导入Logiq E9超声仪内,采用三点法进行影像配准。超声图像与CT图像同屏显示,患者体表任取3个标记点,依次进行精确寻找和锁定,完成外标记点配准。在CT图矢状面上寻找任意椎体棘突顶点并锁定,然后在超声图像内寻找相应点进行锁定,完成内标记点配准。利用GE超声仪容积导航软件对配准进行修正,确保图像配准误差不多于5 mm,使图像融合。
1.3 观察指标
比较两组患者的术中情况、视觉模拟评分法(visual analogue score,VAS)评分、Oswestry功能障碍指数(oswestry disability index,ODI)评分和术后并发症情况。①术中情况:包括手术时间、穿刺总时间和透视次数;②VAS评分:0分为无痛,10分为无法忍受的剧痛,0~10分划分为10个疼痛等级,满分10分,让患者选择自己疼痛的程度;③ODI评分:共分为5个等级,0%~20%为轻度功能障碍,21%~40%为中度功能障碍,41%~60%为重度功能障碍,61%~80%为跛行或拄拐,81%~100%为不能下床活动;④并发症:记录患者术后并发症发生情况。
1.4 统计学方法
采用SPSS 20.0软件包进行统计学分析,计量资料用均数±标准差(±s)表示,采用t检验,以P<0.05为差异有统计学意义。
2 结果
2.1 术中情况比较
观察组患者的手术时间(68.33±11.63)min、穿刺总时间(14.32±2.97)min和透视次数(4.93±0.91)次,均明显低于对照组患者的手术时间(95.74±12.43)min、穿刺总时间(19.37±3.54)min和透视次数(14.27±1.37)次,差异具有统计学意义(P<0.05)。见表1。
表1 两组术中情况比较 (±s)Table 1 Comparison of intraoperative conditions between the two groups (±s)

表1 两组术中情况比较 (±s)Table 1 Comparison of intraoperative conditions between the two groups (±s)
组别 手术时间/min 透视次数/次 穿刺总时间/min观察组(n=26) 68.33±11.63 4.93±0.91 14.32±2.97对照组(n=26) 95.74±12.43 14.27±1.37 19.37±3.54 t值 2.08 2.57 2.38 P值0.0420.0100.033
2.2 VAS评分比较
观察组和对照组患者VAS评分术前为(6.79±1.17)和(6.48±1.14)分,术后1个月为(2.25±1.18)和(2.38±1.05)分,术后3个月为(1.59±1.03)和(1.55±0.97)分,术后6个月为(0.97±0.88)和(1.04±0.86)分,术后12个月为(0.80±0.63)和(0.73±0.58)分,两组各时点比较差异无统计学意义(P>0.05)。见表2。
表2 两组VAS评分比较 (分,±s)Table 2 Com parison of VAS scores between the two groups (points ,±s)
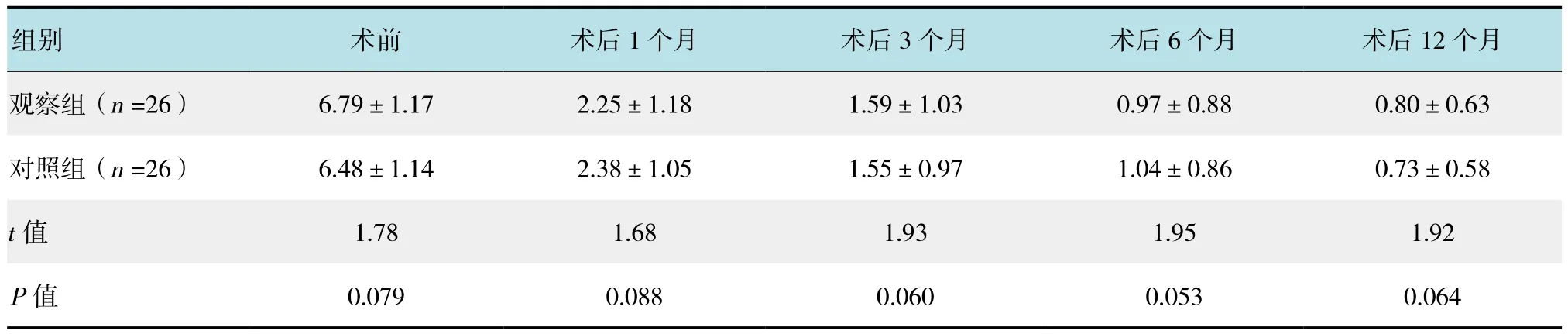
表2 两组VAS评分比较 (分,±s)Table 2 Com parison of VAS scores between the two groups (points ,±s)
组别 术前 术后1个月 术后3个月 术后6个月 术后12个月观察组(n=26) 6.79±1.17 2.25±1.18 1.59±1.03 0.97±0.88 0.80±0.63对照组(n=26) 6.48±1.14 2.38±1.05 1.55±0.97 1.04±0.86 0.73±0.58 t值 1.78 1.68 1.93 1.95 1.92 P值 0.079 0.088 0.060 0.053 0.064
2.3 ODI评分比较
观察组和对照组患者ODI评分,术前为(66.95±12.38)和(67.33±11.74)分,术后1个月为(22.97±11.54)和(23.94±11.26)分,术后3个月为(13.76±9.71)和(15.94±10.82)分,术后6个月为(9.23±7.60)和(9.43±8.25)分,术后12个月为(6.37±5.19)和(6.57±5.72)分,两组各时点差异无统计学意义(P>0.05)。见表3。
表3 两组ODI评分比较 (%,±s)Table 3 Com parison of ODI score between the two groups (%,±s)
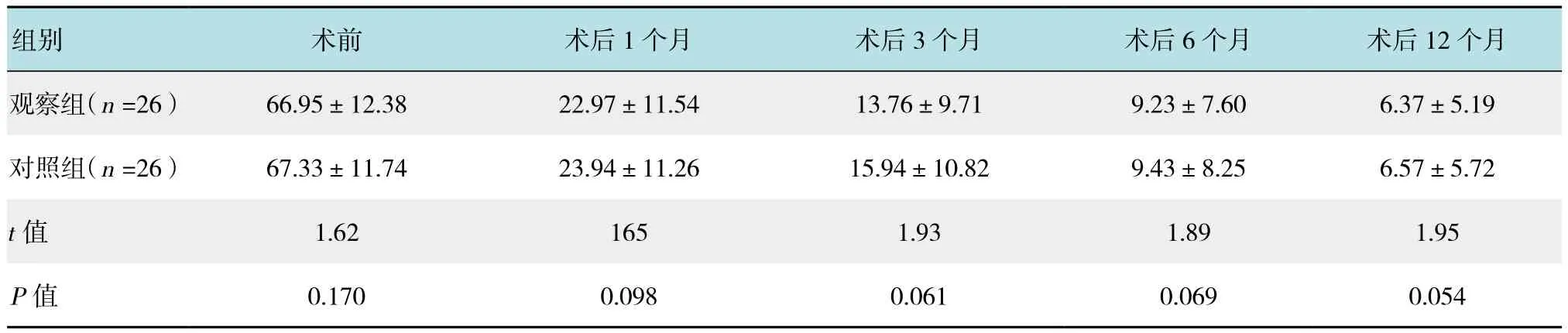
表3 两组ODI评分比较 (%,±s)Table 3 Com parison of ODI score between the two groups (%,±s)
组别 术前 术后1个月 术后3个月 术后6个月 术后12个月观察组(n=26) 66.95±12.38 22.97±11.54 13.76±9.71 9.23±7.60 6.37±5.19对照组(n=26) 67.33±11.74 23.94±11.26 15.94±10.82 9.43±8.25 6.57±5.72 t值 1.62 165 1.93 1.89 1.95 P值 0.170 0.098 0.061 0.069 0.054
2.4 并发症发生情况
观察组和对照组患者术中均未发生显著并发症,术后虽有疼痛症状但均可自行或经药物治疗缓解。
3 讨论
随着微创脊柱外科手术的不断发展,腰椎间盘突出症患者在临床中的治疗越来越微创化,但由于关节突会遮挡手术视野,腰椎间盘突出症患者的微创治疗难度较大,采用腰椎经皮后外侧入路内镜下手术治疗需要将脊椎旁肌肉和软组织剥离,并将部分关节突等骨性组织切除,会造成手术入路副损伤,导致患者术后远期腰椎不稳或腰背疼痛等[6]。因此,迅速而准确的建立工作通道,避免对椎间孔发出的神经根和大血管造成损伤是具有十分重要临床意义的。“C”型臂X线机透视是传统腰椎经皮后外侧入路内镜下手术中常用的透视引导,但患者和手术医师暴露在大剂量辐射下,对其健康产生严重威胁[7]。而图像融合技术是将不同模式的图像所提供的信息相互融合和互补,能够弥补单一模式医学影像资料的不足,提高图像的清晰度和可靠性[8]。在本研究中,笔者通过空间匹配、变换处理、叠加导入等将不同医学影像设备获取的影像学资料导入超声系统,并进行标记点配准,进行实时匹配,大大提高了影像的准确度。
超声容积导航技术是将电磁导航技术与图像融合技术相结合的技术,适用于因气体、骨骼、患者体型等因素而对常规超声检测产生影响的患者,通过图像融合技术,弥补常规超声成像的不足,并在超声图像中迅速地确认并识别其他影像学数据中已经识别的病变[9]。确定病灶位置后,还可以通过超声对治疗过程进行实时指导,具有便捷、实时、无辐射和无创等优势[10]。本文研究结果显示,观察组患者的手术时间、穿刺总时间和透视次数均低于对照组患者,差异具有统计学意义(P<0.05)。这是因为观察组患者在手术中将CT扫描所获取的清晰骨组织三维图像与超声实时图像想结合,迅速而准确地定位了目标椎间孔位置;同时利用体表标记进行外配准联合棘突尖的固定位置进行内配准,极大地矫正了配准误差,提高了影像融合的精确度,进而降低了术中穿刺时间和透视次数,从而缩短了手术时间[11]。同时本文研究结果显示,观察组和对照组患者术中均未发生显著并发症,术后虽有疼痛症状但均可自行或经药物治疗缓解。这是由于图像融合帮助医生迅速而准确地到达目标区域,并且图像融合将CT扫描较宽的视野、高空间分辨率等优点与超声的实时性相互结合,不仅提高了对目标区域直接可视化的能力,减少重复穿刺,还能够避免手术过程中采用“C”型臂X线机透视而暴露在大剂量辐射中,因而观察组患者血肿、意外穿刺、硬膜囊破裂和神经根损伤等术中并发症发生率较低[12]。但在临床操作中发现,超声医师的操作手法不易用力过大或者不稳,可能会导致脂肪组织或探头在患者体表移动而影响配准结果,特别是对于肥胖患者来说,超声医生手法一定要轻柔稳定,将配准误差控制在5 mm以内。综上所述,采用超声容积导航较“C”型臂X线机透视能够增强穿刺准确性,减少穿刺时间,且患者术中无显著并发症,安全性较佳。
[1]LI Z Z,HOU S X,SHANG W L,et al.The strategy and early clinical outcome of full-endoscopic L5/S1discectomy through interlam inar approach[J].Clin Neurol Neurosurg,2015,133: 40-45.
[2]韩立强,江汉,田永刚,等.经皮椎间孔镜技术结合工作通道分步置入法治疗巨大型腰椎间盘突出的短期疗效[J].实用医学杂志,2016,32(14): 2393-2395.
[2]HAN L Q,JIANG H,TIAN Y G,et al.Short-term efficacy of percutaneous lum bar intervertebral foram en com bined with working channel in the treatm ent on giant lum bar disc herniation[J].The Journal of Practical Medicine,2016,32(14): 2393-2395.Chinese
[3]李纯志,刘伟,赵宏,等.椎间孔镜微创髓核摘除术用于腰椎间盘突出症再手术的解剖学优势[J].中华解剖与临床杂志,2016,21(2): 137-141.
[3]LI C Z,LIU W,ZHAO H,et al.Anatom ic advantage of percutaneous endoscopic lumbar discectomy in the reoperation treatment of lumbar disc reherniation[J].Chinese Journal of Anatomy and Clinics,2016,21(2): 137-141.Chinese
[4]项光恒,徐华梓,徐晖,等.脊椎定位框在胸腰椎手术术前定位中的临床应用[J].医学研究杂志,2016,45(3): 101-103.
[4]X IANG G H,XU H Z,XU H,et al.Application of spinal positioning frame in preoperative localization for thoracolumbar operation[J].Journal of Medical Research,2016,45(3): 101-103.Chinese
[5]XU H,JIA F,LIU Y,et al.Minimally Invasive surgery with spotlight work channel system in the treatment of lumbar disc herniation: a retrospective study of 21 cases[J].Cell Biochem Biophy,2015,71(1): 243-248.
[6]LI D,YANG H,HUANG Y,et al.Lumbar Intervertebral disc puncture under c-arm fluoroscopy: a new rat model of lumbar intervertebral disc degeneration[J].Exp Anim,2014,63(2): 227-234.
[7]钱玉强,王强,彭俊,等.3D C型臂X线机在PVP和PKP治疗骨质疏松性椎体压缩骨折中的应用[J].中国骨与关节损伤杂志,2016,31(5): 521-522.
[7]QIAN Y Q,WANG Q,PENG J,et al.Application of 3D C-arm X-ray machine in the treatment of osteoporotic vertebral compression fractures with PVP and PKP[J].Chinese Journal of Bone and Joint Injury,2016,31(5): 521-522.Chinese
[8]刘彦斌,李军,付强,等.超声容积导航引导经腰椎间孔穿刺的应用解剖[J].解剖学杂志,2015,38(6): 709-713.
[8]LIU Y B,LI J,FU Q,et al.Applied anatomy for transforam inal puncture using ultrasound volume navigation technique in cadavers[J].Chinese Journal of Anatomy,2015,38(6): 709-713.Chinese
[9]陶肖樱,赵博文,周金红,等.胎儿心脏超声智能导航联合虚拟智能超声辅助技术在基本胎儿超声心动图切面主要诊断要素显示中的价值研究[J].中华超声影像学杂志,2016,25(12): 1030-1036.
[9]TAO X Y,ZHAO B W,ZHOU J H,et al.Value of fetal intelligent navigation echocardiography (5D heart) and Virtual Intelligent Sonographer Assistance (VIS-Assistance) in the display of key diagnostic elements in basic fetal echocardiographic view s[J].Chinese Journal of U ltrasonography,2016,25(12): 1030-1036.Chinese
[10]苏中振,李柳军,李凯,等.基于肝血管树的三维超声自动图像融合初步研究[J].中华超声影像学杂志,2014,23(10): 865-868.
[10]SU Z Z,LI L J,LI K,et al.A p relim inary study of threedimensional ultrasound images automatic registration based on hepatic vessel[J].Chinese Journal of U ltrasonography,2014,23(10): 865-868.Chinese
[11]苏中振,李柳军,徐士丞,等.弥漫性肝病对三维超声单模态自动图像融合的影响[J].中华超声影像学杂志,2015,24(1): 40-43.
[11]SU Z Z,LI L J,XU S C,et al.Diffuse hepatic diseases affect on three-dimensional ultrasound single-modality automatic images fusion[J].Chinese Journal of Ultrasonography,2015,24(1): 40-43.Chinese
[12]朱晓龙,王建,周跃,等.微创经椎间孔腰椎体间融合术的围手术期并发症[J].中国脊柱脊髓杂志,2016,26(4): 304-309.
[12]ZHU X L,WANG J,ZHOU Y,et al.Perioperative complications of minimally invasive transforam inal lumbar interbody fusion[J].Chinese Journal of Spine and Spinal Cord,2016,26(4): 304-309.Chinese
猜你喜欢
铁道建筑技术(2022年10期)2022-10-28
基层中医药(2022年2期)2022-07-22
中国典型病例大全(2022年9期)2022-04-19
河南外科学杂志(2020年6期)2020-12-05
中华养生保健(2020年5期)2020-11-16
医药前沿(2019年27期)2019-11-07
中国中西医结合外科杂志(2019年4期)2019-08-19
装备制造技术(2017年7期)2017-09-23
中国骨与关节杂志(2015年3期)2015-04-25
中医研究(2014年11期)2014-03-11