
双C型臂X射线机结构设计
2017-09-23 02:47孙瑞峰张通化管付银
装备制造技术 2017年7期
孙瑞峰,张通化,管付银
双C型臂X射线机结构设计
孙瑞峰,张通化,管付银
(长安大学工程机械学院,陕西西安710064)
通过分析当前C型臂X射线机设备的工作形式,提出了一种新型的C型臂机械结构设计方案。采用双C型臂结构,将大小C臂分别作为两套独立的成像机构并存于设备中,通过两个C型臂独立的进行同中心回转,两套成像系统相结合,可以形成立体诊断图像,更加直观便捷。同时设计出了C型臂的驱动和锁紧结构,并运用SolidWorks软件中建立结构模型。
C型臂X射线机;驱动机构;锁紧机构
C型臂X射线机是一种为医生使用数字减影技术(DSA)进行介入式手术治疗提供载体的医疗器械[1]。现有的C型臂X射线机为单C型臂产品,在进行手术时需要频繁的调整C型臂位置来交替获得患者手术部位的不同侧位的图像,在调整C型臂的操作过程中容易失去手术部位的影像,重新恢复成像需要继续转动和定位,调整过程费时且成像不稳定[2]。目前国内的设计手段主要是经验设计和附加简单计算的设计,对制造工艺、制造成本、运输等方面提出很高的要求,同时,无法实现多角度成像,不利于市场竞争。
本文给出一种双C臂结构,其大C臂可以沿托架做圆周运动,同时小C臂也能进行相对于大C臂同回转中心旋转的圆周运动,手术时可同时获得正面和侧面影像,减小了设备调整对医生手术的干扰,能够缩短手术的时间。
1 双C型臂结构
双C型臂的结构须在保证大小C臂同中心旋转的前提下,能够准确的获得X射线机旋转极限范围的内任意位置的X线影像。并且大小C臂能在各自的轨道内做相对自由的滑动,无阻滞现象。
1.1 双C型臂结构设计
使用TRIZ创新理论[3]对实现大小C型臂的运动结构进行求解,将大小C臂作为两套单独的成像机构同时安装在整个设备中,大小C臂分别固联球管和发射器实现独立成像。大小C臂截面结构相同,如图1所示,通过轴承轨道安装于支撑回转托架上,并将开口同步带两端分别固定于C臂轴承轨道的两端,利用伺服电机驱动控制C臂沿轴承轨道做圆周方向的旋转运动。小C臂的结构与运动方式和大C臂相同。虽然体积有一定增加,但是避免了在大直径圆弧面上进行齿轮齿面加工,具有较好的加工工艺性,并且这种方案的传动比较简单容易实现;双C结构使球管和探测器的安装和固定变得方便;双C臂的结构工作时可以进行同中心旋转成像。
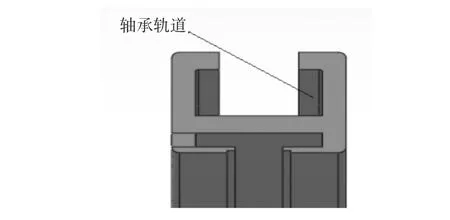
图1 C型臂截面
1.2 C臂回转托架结构
C型臂在工作过程中,由于医生需要患者手术部位不同角度的影像,因此大小C臂将会处于不同的工作角度位置间。当C型臂与水平面之间为90°夹角时,C臂应与回转托架链接稳定,不发生垂直于平面的攒动,否则会影响成像的质量,增加C臂的调整时间。为消除攒动在回转托架上增加浮动轴承组[4],使C臂型腔侧面始终与浮动轴承组接触,从而在保证运动需要的间隙的同时使C臂平稳地沿回转托架运动到指定角度位置。
C臂不但能够沿回转托架做圆周运动同时还能够随回转托架一起进行转动和小角度摆动以适应不同的工作位置要求,C臂处于这种位置时会使C臂型腔与回转托架的垂直方向产生间隙,造成C臂的晃动。通过C臂型腔与回转托架完全契合的方式消除间隙所需要的加工精度难以满足,所以为了达到消除间隙的目的,在回转托架中安装可调径向轴承。通过调整径向轴承的位置减小C臂型腔与浮动轴承组的间隙,降低加工精度的要求,避免垂直于回转托架方向的攒动(具体结构如图2所示)。

图2 回转托架结构
这种结构的设计在简化零部件加工工艺性的同时使设备的结构得到了简化,而且对大小C臂的支撑具有较好的稳定性,避免了C臂与回转托架之间因间隙产生的晃动。并且大小C臂运动时能够绕同一个回转中心做同中心旋转,保证成像系统在工作时能够准确的获得患者任意角度的立体诊断图像。
2 双C方案的驱动机构
驱动机构由伺服电机、同步带驱动轮、同步带压轮组成。大小C臂与回转托架通过C臂型腔和轴承组联接起来,将开口同步带的两端分别固定在C臂的两端,使同步带与C臂连接为一个整体。回转托架上装有同步带轮,伺服电机通过它驱动固定同步带的C臂绕着圆弧中心进行旋转,控制系统通过控制伺服电机驱动力的输入从而控制C型臂旋转的速度并保证其位置精度。同步带轮同时驱动编码器,将位移信息反馈至控制系统,保证旋转的精度,提高成像的精确性。见图3.

图3 C臂驱动结构
为增大同步带在同步带轮上的包角从而增大驱动力,在同步带轮两侧分别安装有两个同步带压轮。在回转托架的两端同样安装有同步带压轮,这里的同步带压轮主要是保证同步带不与回转托架发生摩擦,实现同步带的正常运转。同步带传动不仅保证了传动的准确可靠还简化了设备的结构,降低了设备的整体重量。
3 锁紧机构
C臂在工作过程中会处于任意的角度,为了防止C臂在工作的过程中,由于伺服电机损坏或者某种突发状况导致不能固定C臂的位置,从而出现C臂失控滑动的危险,因此在同步带驱动轮轴安装偏心锁紧机构避免失控滑动的危险。
3.1 锁紧机构原理
锁紧机构安装在同步带驱动轮轴上,此机构原理主要是通过偏心轮与圆形卡箍之间形成的摩擦力对C型臂的锁紧。卡箍一端固定,另一端与偏心轮接触,偏心轮利用自锁原理进行设计,使偏心机构产生的正压力始终作用在圆形卡箍上,圆形卡箍与同步带驱动轮轴之间会产生足够大的沿卡箍内圆切线方向的摩擦力,圆形卡箍与同步带驱动轮轴形成的摩擦力作为预紧力作用在同步带驱动轮轴上,锁紧摩擦力的大小可以通过调整偏心轮的行程进行调节,行程越大摩擦力越大。见图4.

图4 锁紧机构
3.2 锁紧条件
如图5所示,O为偏心轮回转轴的中心,B为偏心轮的中心,OB=e为偏心距,偏心轮与夹紧表面接触点P的回转半径为OP,OP的垂线AP与夹紧表面间的夹角λ.
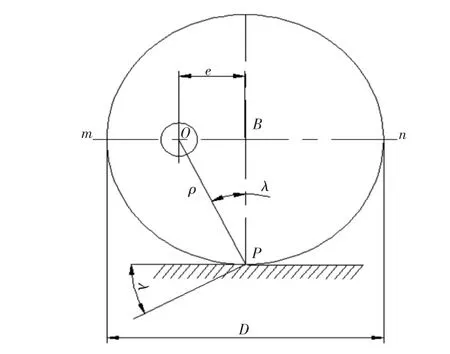
图5 锁紧原理
偏心机构能形成自锁的条件为λ≤φ1+φ2,式中φ1为偏心轮与夹紧表面之间的摩擦角,φ2为偏心轮与回转轴之间的摩擦角。忽略偏心轮与回转轴之间的摩擦力,并考虑最大时能形成自锁,则自锁条件是≥,f1为偏心轮与夹紧表面之间的摩擦系数。
本文根据自锁条件设计出偏心圆的直径为40 mm,偏心行程为2 mm.经过试验样机验证,锁紧安全可靠。
4 结束语
结合现有的C型臂X射线机的使用,对现有的C型臂X射线机的不足进行分析,给出了能够实现立体诊断图像的双C型臂X射线机的C臂结构。在此基础上对双C型臂结构的驱动和锁紧机构进行结构设计,对C型臂X射线机的C臂设计有一定的借鉴价值。
[1]陈小松.DSA医学图像的增强技术及应用研究[D].苏州:苏州大学,2005.
[2]张正国.C型臂X射线机的研发设计[D].西安:长安大学,2013.
[3]根里奇-阿奇舒勒著.发明家诞生了—TRIZ,创造性解决问题的理论和方法[M].范怡红,黄玉霖,译.成都:西南交通大学出版社,2004.
[4]王梦熊,王家鄞.医用X射线定位设备“C”形臂结构的计算与设计[J].机械设计与研究,1993(1):25-27.
Structural Design of Double C Arm X Ray Machine
SUN Rui-feng,ZHANG Tong-hua,GUAN Fu-yin
(College of Engineering and Mechanical Engineering,Chang’an University,Xi’an Shaanxi 710064,China)
Based on the analysis of the current working mode of the C arm X ray machine,this paper presents a new design scheme of the C arm mechanical structure.The double C type arm structure,the size of the C arm respectively as two independent institutions coexist in the imaging device,through two C arm independent with the rotary center,two sets of imaging system are combined,can form a three-dimensional image diagnosis,more intuitive and convenient.At the same time,the drive and locking structure of C arm is designed,and the structural model is established by using SolidWorks software.
C arm X ray machine;driving mechanism;locking mechanis
TH774
A
1672-545X(2017)07-0124-03
2017-04-20
孙瑞峰(1990-),男,山东日照人,硕士研究生(在读),研究方向为机械设计及理论。
猜你喜欢
橡胶科技(2022年5期)2022-07-20
重庆理工大学学报(自然科学)(2022年2期)2022-03-23
航空发动机(2022年1期)2022-03-11
长春大学学报(2021年4期)2021-05-17
航空发动机(2019年3期)2019-12-12
汽车实用技术(2018年18期)2018-09-26
价值工程(2017年31期)2018-01-17
专用汽车(2016年8期)2016-03-01
汽车实用技术(2015年8期)2015-12-26
航空标准化与质量(2015年2期)2015-12-22
