硫化机机械手振动控制研究及设计改进
2018-02-08 02:20雷海波王时敏
橡塑技术与装备 2018年3期
雷海波,王时敏
(山河智能装备有限公司,湖南 长沙 410000)
随着世界“工业4.0”及“中国智造2025”战略的升级,各大轮胎厂都将如何提高生产线自动化程度作为未来工作的重中之重。轮胎硫化机作为轮胎工业生产中最重要的工艺设备之一,其自动化程度直接影响轮胎厂生产线的自动化水平,而其装胎机械手的先进性、稳定性及自动化水平则是制约轮胎硫化机自动化水平的关键因素。郭良刚等为了提高装胎机械手的精度,开发了电动变频机械手[1]。旺明等对硫化机机械手结构进行了改进,采用电动摆台调整机械爪,提高重复对中精度及自动化水平[2]。
轮胎硫化机装胎机械手停止转动时因惯性存在一定的振动,严重影响效率及抓胎爪片的对中精度。而关于装胎机械手振动控制方面鲜有研究。本工作主要从理论上研究装胎机械手上气缸安装位置、缓冲机构对振动控制的影响,同时结合实际生产,验证理论分析的正确性。
1 装胎机械手简介
以某型号轮胎定型硫化机为研究对象,轮胎硫化机装胎机械手示意图见图1所示,主要包括机械爪、转进转出气缸、机械臂、升降支架等。其功能为把轮胎生坯抓起,然后转到与轮胎硫化机中心机构同轴位置,将生胎套入硫化胶囊中,并且能在生胎定型过程中起定位导向作用[3]。
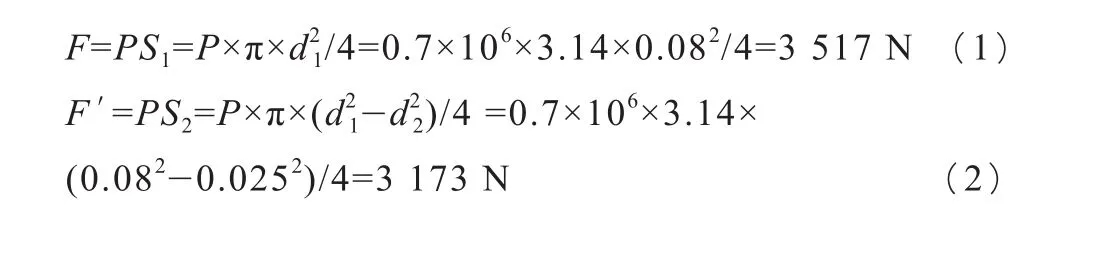
轮胎硫化机装胎机械手转进转出用气缸缸径d1为80 mm,气体压力P为0.7 MPa,活塞杆直径d2为25 mm,则活塞杆伸出时气缸提供的推力F及活塞杆缩回时气缸提供的推力F′分别为:

图1 轮胎硫化机装胎机械手示意图
2 装胎机械手振动控制分析
轮胎硫化机装胎机械手振动影响因素较多,主要包括气缸减震设计及选型、限位及缓冲机构设计、气缸与机械臂安装角度等。由于气缸已定型,故本研究主要从气缸安装位置、缓冲机构方面进行分析。
2.1 气缸安装位置对振动控制影响
图2为优化的气缸安装位置与转臂受力关系示意图,当气缸支点在转臂起点和转臂终点连线延长线上时,气缸在起点位置和终点位置提供给转臂的力相等,且最大,以保证机械手转动时具有足够的起始推力。整个行程中其他位置气缸提供的力均大于起点和终点位置。

回程时气缸提供的起始和最终推力F2为 :

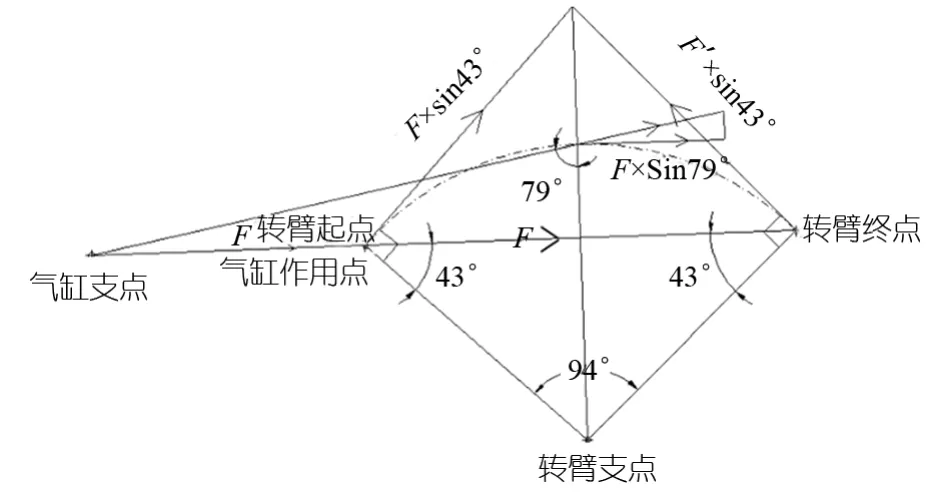
图2 气缸安装位置与转臂受力关系示意图
假设机械手质量m为350 kg(包括轮胎),转臂行程为θ=94°,转臂从起点到终点需要时间t1=3 s,则转臂平均角速度ω为:

转臂从静止达到角速度ω所需时间t2为0.5 s,机械爪重心到转动支点距离r=0.8 m,转臂l=0.26 m(根据气缸行程380 mm计算得),转动轴承摩擦力产生力矩忽略不计,计算得机械手转动所需最小推力Fmin为:

根据前面计算,80 mm缸径气缸去程及回程时气缸提供的垂直转臂的最小推力F1=2 399 N 、F2=2 164 N,均大于机械手转动所需最小推力1 421.6 N,满足使用要求。
2.2 缓冲机构对机械手振动控制影响
装胎机械手使用的缓冲形式可以概括为3类:摆动式缓冲机构、拉杆式单缓冲机构以及拉杆式双缓冲机构。摆动式缓冲机构因碰撞瞬间作用力很大,使用寿命较短;拉杆式单缓冲机构的拉杆在转出位时受拉力,在转入位时受推力,2个缓冲器在滑块上必须反向安装,而且是独立工作,这样滑块只有一边受力,对滑块的轴以及拉杆都会产生额外的扭矩,影响结构的稳定性和使用寿命。拉杆式双缓冲机构的拉杆在转出位和转入位都受拉力,2个缓冲器在滑块上同向对称安装,同时工作,使滑块受力对称,不会产生额外的扭矩,滑块的轴以及拉杆的受力情况都会远远优于拉杆式单缓冲结构。
图3为优化的拉杆式双缓冲机构原理图,当缓冲器拉杆支点移到转臂运动轨迹的外面,且拉杆上力的方向与旋转速度的方向共线并相反时,拉杆上的力可以全部用作有效力(机械手的缓冲、减速),此时拉杆、旋转轴、缓冲器等受力是最优、最小的,2个缓冲器同时吸能,可以选用较小型号的缓冲器。图4为优化的拉杆式双缓冲机构三维模型。

图3 拉杆式双缓冲机构原理图

图4 拉杆式双缓冲三维轴侧视图
气缸提供的垂直作用力F1=2 399 N,机械爪重心到转动支点距离r=800 mm,角速度ω=0.55 rad/s,假设缓冲器行程s=16 mm,则转动动能Ek为:

作用在缓冲器上的力f为:

做功能量Ew为:

机械手总能量E总为:

同时使用2个缓冲器,则单个缓冲器需要吸收的能量E单为 :

设计所选缓冲器最大单次吸收能量必须大于计算的E单值,一般取安全系数1.2,建议选用韩国KOBA的KMA20-16LV型号缓冲器(Etmax=61 N.m)或其他品牌Etmax大于54 N.m的缓冲器。
3 结果验证
根据上述理论分析结果,对该型号轮胎硫化机机械手进行设计优化,在其他结构不变的前提下,将气缸支点设计在转臂起点和转臂终点连线延长线上,并设计新的拉杆式双缓冲机构,确保拉杆上力的方向与旋转速度的方向共线并相反,试制一套装胎机械手并投入试用,发现优化后的机械手振幅很小,较原机械手有很大改进,得到客户的高度认可。
4 结论
当气缸支点在转臂起点和转臂终点连线延长线上时,气缸在起点位置和终点位置提供给转臂的力相等,且最大,以保证机械手转动时具有足够的起始推力。
当缓冲器拉杆支点移到转臂运动轨迹的外面,且拉杆上力的方向与旋转速度的方向共线并相反时,拉杆上的力可以全部用作有效力,缓冲效果最好。
[1] 郭良刚,张晓琳,宋瑞华,等.机械双模硫化机电动变频机械手的研制开发[J].橡塑技术与装备,2016(42):37~38.
[2] 汪明,李新胜,王鹏.数字化调整在硫化机机械手上的应用[J].橡塑技术与装备,2014(40):35~37.
[3] 吕柏源,洛少宁,何月梅,等.橡胶机械(上册)[M].北京:化学工业出版社,2014:1 021.
猜你喜欢
机械设计与制造(2022年11期)2022-11-21
轻兵器(2022年3期)2022-03-21
铁道车辆(2021年4期)2021-08-30
中国设备工程(2018年21期)2018-11-14
装备制造技术(2016年11期)2017-01-09
西安交通大学学报(2016年10期)2016-12-22
铁道机车车辆(2016年3期)2016-10-25
装备环境工程(2015年5期)2015-02-28
装备环境工程(2015年5期)2015-02-28
装备环境工程(2015年5期)2015-02-28