空间机械臂间隙影响分析
2018-01-04 07:50张玉翠张晖辉
空间控制技术与应用 2017年6期
张玉翠,刘 峰,张晖辉
(燕山大学河北省重型装备与大型结构力学可靠性重点实验室,秦皇岛 066004)
空间机械臂间隙影响分析
张玉翠,刘 峰,张晖辉
(燕山大学河北省重型装备与大型结构力学可靠性重点实验室,秦皇岛 066004)
为考察关节间隙和柔度对机械臂动力学行为的影响,分别建立平面二自由度和空间7自由度的机械臂刚柔耦合模型,应用ADAMS 软件采用间隙铰非线性弹簧阻尼模型,考虑臂杆柔度和间隙对动力学性能的影响,对两种机构进行动力学仿真分析.分析结果表明:臂杆柔度对位移影响较小,但角速度、角加速度曲线随柔度增加波动显著增大;由于间隙的存在,关节碰撞导致机械臂运动精度、角速度与角加速度随间隙显著增大.
动力学;空间机械臂;刚柔耦合;间隙;
0 引 言
空间机械臂一般由多个臂杆组成,通过铰链连接,由于设计、制造和微重力环境的影响,铰间间隙不可避免[1-3],为保证机械臂具有较大的操作空间和较小的质量,多使用细长杆.在机械臂运行过程中,机械臂柔度和间隙的存在会对机构动力学特性产生较大影响[4-7],导致实际运动轨迹偏离期望轨迹和机械臂剧烈振动,从而机构运动精度与性能有所下降,甚至失效;同时机构关节铰碰撞力增大,加剧了对机构的破坏[8-10],进而引起机械臂工作任务的失败.因此,开展机械臂柔度和间隙对空间机械臂动力学性能的研究有着重要意义.刘志全等[11]分析比较了空间柔性机械臂各种建模方法的特点,指出宜采用混合坐标法分析臂杆运动与变形的耦合.阎绍泽[12]介绍了航天器中含间隙空间机构动力学的研究进展,论述了间隙非线性研究对航天器的发展及在轨运行性能分析的重要意义.何柏岩等[13]针对含间隙的刚性机械臂系统进行动力学建模和仿真分析,分析了间隙对刚性机械臂系统的运动精度有很大的影响,但是只针对刚性机械臂给出了仿真结果.杨晓钧等[14]针对含一个间隙和双间隙的曲柄滑块机构建立模型,并分别采用 Matlab数值仿真和商业软件ADAMS进行仿真,定性分析了不同间隙对曲柄滑块机构动态性能的影响,论文也集中于运动副间隙的影响未考虑机构柔度.文献[15-16]针对含间隙的空间可展机构进行了动力学建模和仿真,分析了间隙对机构运动的影响.王庚祥等[17]基于连续接触模型研究了空间球面副间隙对新型减振平台动力学性能的影响.以上模型一般专注于间隙模型以及参数方面的影响,并未联合考虑臂杆的柔性影响.本文结合机械臂的空间特性,分别建立含间隙平面2自由度和空间7自由度的机械臂刚柔耦合模型,进一步对它们进行动力学仿真分析,应用非线性阻尼模型,讨论了间隙和结构柔度的影响.
1 平面二自由度柔性机械臂仿真分析
1.1 刚柔耦合模型的建立
利用Adams/Autoflex模块的网络模式法建立柔性机械臂模型,得到空间机械臂的刚柔耦合动力学模型,进而对其进行动力学分析.平面运动的二自由度柔性机械臂模型由基座、两根臂杆、两关节旋转铰组成,如图1所示.关节1连接星本体与臂杆1,关节2连接臂杆1与臂杆2,为了研究不同柔性机械臂臂杆长度对机械臂运动的影响,分别建立臂杆长度为8.4 m、8.6 m、8.8 m、9.0 m、9.2 m的模型,设置材料为钛合金,关节驱动均为正弦函数.仿真计算中忽略重力的影响.
1.2 不同臂杆柔性机械臂对比分析
为了表明臂杆的长度与其变形之间的联系,臂杆柔度为
λ=EI/l
(1)
其中,E为臂杆的弹性模量,I为平面运动机械臂惯性矩,l为臂杆的长度.在Adams中对五种不同臂杆长度的刚柔耦合机械臂系统进行动力学分析,运动时间为20 s,步长0.1 s.仿真后得到臂杆1和臂杆2质心的位移、角速度及角加速度曲线如图2~4所示.图2为臂杆1的仿真计算结果.由图2可知,臂杆1的质心位移由于臂杆长度的不同,其质心位置初始值不同,但五个曲线呈现相同的运动趋势.由图3~4可知,不同臂杆长度对臂杆1的质心角速度、角加速度没有影响,曲线基本重合,说明臂杆长度的不同只改变了柔性臂杆1的质心位移,对臂杆1的角速度及角加速度曲线的影响很小.
图5~7为臂杆2的仿真计算结果.由图5可以看出:臂杆2质心位移的变化较平稳,只有在峰点的位置附近产生微小的波动,说明在给定的驱动从零发生变化时,位移出现不稳定变化,随着驱动的变化,位移趋于平稳.从图6~7得知臂杆2的质心角速度和角加速度随着驱动速度的变化也会产生波动,臂杆越长,其波动的程度也就越大.这也与林倩和袁军[18]的结果一致.
对比臂杆1与臂杆2的位移、角速度及角加速度曲线,可以发现臂杆2的曲线波动幅度远大于臂杆1,表明由于臂杆柔性的影响,使机械臂系统越接近末端,其位移、角速度及角加速度振动幅度越大,波动越明显.说明臂杆柔度的不同会对臂杆2产生较大的影响.
2 含间隙柔性机械臂仿真分析
为了建立如图4所示含间隙空间运动的七自由度机械臂刚柔耦合模型.机械臂系统中含有星本体(基座)、2个臂杆、末端重物以及7个主动控制的关节,因此机构含有7个自由度,且机构关于两臂杆中间的关节完全对称.为了研究间隙大小对柔性机械臂系统的影响,考虑两臂杆连接的旋转铰即旋转铰4含有间隙,分别建立了间隙为0 mm、0.2 mm、0.4 mm 的模型,其他6个旋转铰为无间隙理想旋转铰.
ADAMS采用IMPACT碰撞函数处理间隙,碰撞物体之间的碰撞力为

(2)
Fτ=Fnμ(ντ)
(3)
其中:Fn为接触物体法线方向作用力;Fτ为接触物体切线方向作用力,即摩擦力;k为物体等效刚度系数;q为设定的幂指数;Step(·)为阻尼函数;δ为碰撞两物体法线方向的穿透量;cmax是法向最大阻尼系数;dmax为设定的与法向阻尼有关的常数;cmax与dmax决定了阻尼函数的形状;ντ表示两物体切向相对速度大小;μ(ντ)为两物体间摩擦系数的函数.以上参数的具体取值如表1所示.
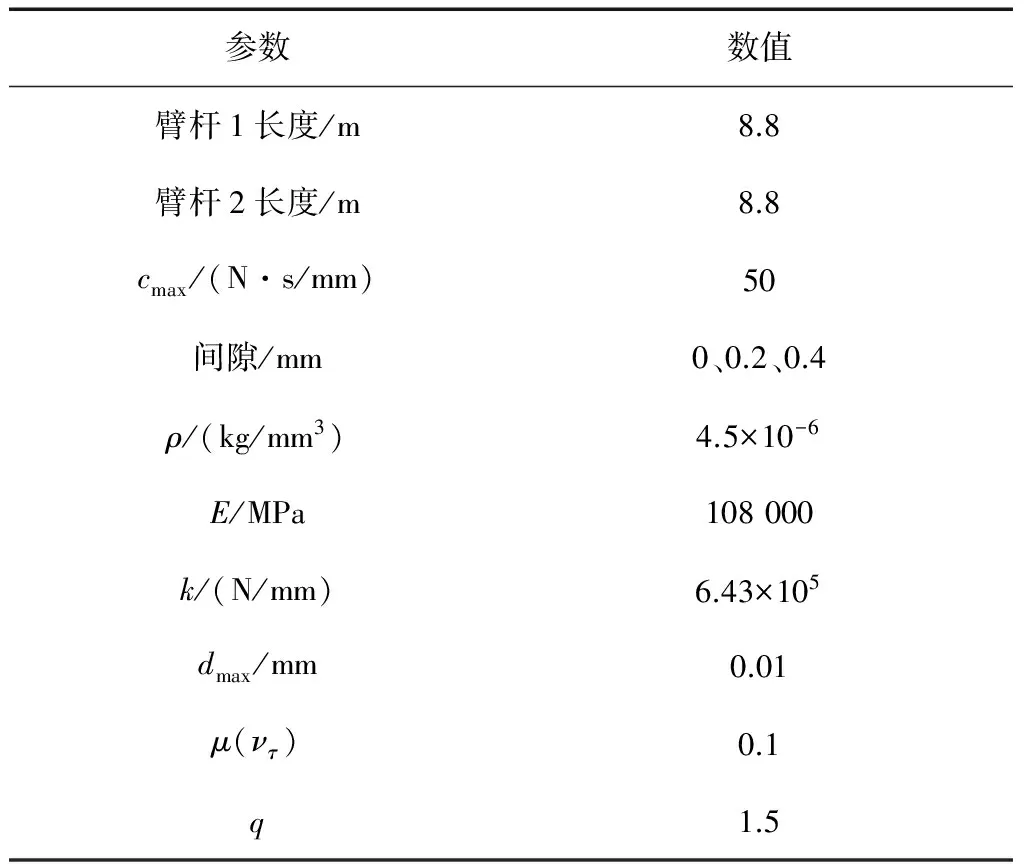
表1 含间隙柔性机械臂仿真参数Tab.1 Simulation parameters of the space flexible manipulator with joint clearance
运用Adams软件进行仿真分析,运动时间为20 s,步长0.1 s.仿真后得到臂杆1、臂杆2质心以及臂杆2末端重物的位移、角速度及角加速度曲线如图5~7所示.
图9~11为臂杆1的位移、角速度和角加速度变化曲线.由图9~10可知,在臂杆1的质心位移和角速度曲线中,无间隙曲线非常光滑,而有间隙曲线有小幅波动,整体基本重合,说明关节间隙对机构的位移特性影响非常小.图11中,含间隙的臂杆1质心角加速度曲线相对理想间隙曲线出现波动情况,且间隙越大波动幅值越大,加速度的振荡显示,间隙的存在导致关节和臂杆的碰撞,碰撞不但对加速度有影响,而且造成界面表面磨损,不但会影响其正常工作,同时还会影响机器的工作性能.
图12~14为臂杆2的位移、角速度和角加速度变化曲线.比较图5和图6可以看出臂杆2的运动显然比臂杆1复杂,臂杆2受间隙的影响比较明显.由于间隙的影响加剧了臂杆的波动,使其产生内碰撞的次数越来越多.由图12中可以看出在不同间隙臂杆2还可以保持相同的运动趋势,但图13和14中运动趋势已不是很明显,说明臂杆2与臂杆1类似,间隙对角速度和角加速度的影响显然大于对位移的影响.角速度及角加速度曲线的波动更加明显且出现较大峰值,幅值随着运动状态的改变而增大,动力学特征出现幅值的位置也不同.
图15~17为臂杆2末端重物的位移、角速度和角加速度变化曲线.由图可见,当间隙不同时,与臂杆2的运动趋势类似,重物的位移曲线基本保持相同的运动趋势,但是角速度及角加速度曲线的波动非常明显,峰值较大,幅值也随着运动状态的改变而增大,动力学特征出现幅值的位置均不不同,规律性较差.此外,关节间隙尺寸越大,振动越明显,机构的动力学性能退化越明显.因此,当该机械臂在考虑间隙且间隙尺寸较大时,它的动力学性能将呈现更加严重的恶化.
总之,运动副间隙值越大,机构动态行为变化愈加激烈,偏离理想机构也越大.机构间隙值会随着机构的磨损增大,从而使机构越来越偏离理想状态甚至会出现不能按照需求的运动而失效,如果考察机构多个周期后预计将会出现混沌现象.因此,运动副所含间隙值的大小将成为影响机构运动精度、可靠性、稳定性以及使用寿命等动态特性一个重要的因素.
3 结 论
分别建立了不同臂杆长度的平面二自由度柔性机械臂和含不同间隙值的七自由度空间柔性机械臂模型,应用Adams软件对两种模型分别进行了动力学分析,考虑柔度和关节间隙对机械臂动力学性能的影响,得出以下结论:
(1)由于臂杆柔性的影响,臂杆质心角速度及角加速度有明显的波动,表明柔性机械臂臂杆随着长度增加柔性越大,越容易产生变形.
(2)运动副中含间隙值越大其曲线波动越明显,且由于含间隙运动副中内碰撞的影响使得曲线出现很大的峰值,表明间隙的存在使得机构运动不稳定,间隙越大运动稳定性越差.臂杆2的波动远大于臂杆1,说明柔性机械臂系统由于间隙的存在对臂杆1的影响较小,自由运动时间较多,碰撞时间少且短暂.而对臂杆2的影响很大,碰撞时间明显增多,表明机构中存在间隙将会对臂杆的末端产生很大的影响,将成为影响机构末端运动精度的重要因素.
[1] 于登云, 孙京, 马兴瑞. 空间机械臂技术及发展建议[J]. 航天器工程, 2007, 16(4): 1-8.
YU D Y, SUN J,MA X R. Suggestion on development of chinese space manipulator technology[J]. Spacecraft Engineering, 2007, 16(4):18.
[2] 张凯峰,周晖,温庆平,等. 空间站机械臂研究[J]. 空间科学学报,2010,30(6):612-619.
ZHANG K F, ZHOU H, WEN Q P,et al. Review of the development of robotic manipulator for international space station[J] Chinese Journal of Space Science, 2010, 30(6): 612-619.
[3] 马兴瑞,王本利,苟兴宇. 航天器动力学—若干问题进展及应用[M]. 北京:北京科学出版社,2001:5-24.
[4] SCHWAB A.L, MEIJAARD J.P, MEIJERS P. A comparison of revolute joint clearance models in the dynamic analysis of rigid and elastic mechanical systems[J].Mechanism and Machine Theory,2002,37(9):895-913.
[5] FLORES P, AMBROSIO J. Revolute joints with clearance in multibody systems[J]. Computers and Structures,2004, 82:1359-1369.
[6] 林倩,袁军. 基于向量对方法的柔性空间机械臂建模与仿真[J]. 空间控制技术与应用, 2016,42(2): 26-31.
LIN Q,YUAN J. Dynamic modeling and simulation of flexible space manipulator based on vector pairs method[J]. Aerospace Control and Application, 2016,42(2): 26-31.
[7] 潘博,孙京,于登云. 柔性关节空间机械臂建模、控制与仿真[J]. 系统仿真学报,2010,22(8): 1826-1831.
PAN B,SUN J,YU D Y. Modeling,control and simulation of space manipulators with flexible joints [J]. Journal of System Simulation, 2010,22(8): 1826-1831.
[8] 戎保,芮筱亭,王国平,等. 多体系统动力学研究进展[J]. 振动与冲击,2011, 30(7): 178-187.
RONG B,RUI X T,WANG G P,et al. Developments of studies on multibody system dynamics[J]. Journal of Vibration and Shock, 2011, 30(7): 178-187.
[9] 丁键, 赵宇, 吴洪涛,等. 含多运动副间隙机构动态特性研究[J]. 组合机床与自动化加工技术. 2014(5): 9-13.
DING J, ZHAO Y,WU H T,et al. Dynamic characteristics of mechanisms with multi-clearance joints[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2014(5): 9-13.
[10] 刘福才, 侯甜甜, 秦利, 等. 考虑铰间间隙和重力影响的空间机械臂轨迹跟踪控制[J]. 控制理论与应用. 2015,32(5):665-673.
LIU F C, HOU T T,QIN L,et al. Trajectory tracking control of space manipulator considering joint clearance and gravity[J]. Control Theory and Applications, 2015,32(5):665-673.
[11] 刘志全,危清清,王耀兵. 载人航天器柔性机械臂动力学建模方法[J].航天器工程. 2013,22(5): 34-41.
LIU Z Q,WEI Q Q,WANG Y B. Review of flexible manipulator dynamic modeling of manned spacecraft[J]. Spacecraft Engineering, 2013,22(5): 34-41.
[12] 阎绍泽. 航天器中含间隙机构非线性动力学问题及其研究进展[J].动力学与控制学报, 2004, 2(2):48-52.
YAN S Z. Development and problems of nonlinear dynamics of the mechanisms with clearances for spacecrafts[J]. Journal of Dynamics and Control, 2004, 2(2):48-52.
[13] 何柏岩,高峰,王树新等. 计及铰链间隙的机械臂动力学建模与仿真[J]. 天津大学学报,2005,38(9):795-799.
HE B Y,GAO F,WANG S X,et al. Modeling and simulation of a mechanical arm with joint clearance[J]. Journal of Tianjin University, 2005,38(9):795-799.
[14] 杨晓钧,张游. 考虑双间隙曲柄滑块机构动力学建模与分析[J]. 机械科学与技术,2014, 33(11):1614-1620.
YANG X J,ZHANG Y. Modeling and analysis of the dynamics for the crank-slider mechanism considering the two pair clearances[J]. Mechanical Science and Technology for Aerospace Engineering, 2014, 33(11):1614-1620.
[15] 阎绍泽,申永胜,陈洪彬,等. 考虑杆件柔性和铰间隙的可展结构动力学数值模拟[J]. 清华大学学报, 2003,42(2):145-148.
YAN S Z,SHEN Y S,CHEN H B,et al. Dynamic performance of deployable structures with flexible members and clearance connections[J]. Journal of Tsinghua University, 2003,42(2):145-148.
[16] 白争锋,赵阳,田浩,等. 含铰间间隙太阳帆板展开动力学仿真[J]. 哈尔滨工程大学学报,2009,41(3):11-14.
BAI Z F,ZHAO Y,TIAN H,et al. Dynamics simulation of depeloyment for solar panelswith hinge clearance[J]. Journal of Harbin Institute of Technology, 1992, 18(5): 585-589.
[17] 王庚祥,刘宏昭,邓培生. 考虑球面副间隙的并联机构动力学模型[J]. 振动与冲击,2014,33(10):43-49.
WANG Y X,LIU H S,DENG P S. Dynamic modeling for a parallel mechanism considering spherical joint clearance[J]. Journal of Vibration and Shock, 2014,33(10):43-49.
[18] 林倩,袁军.基于向量方法的柔性空间机械臂建模与仿真[J].空间控制技术与应用,2016(02):26-31.
LIN Q,YUAN J.Dynamic modeling and simulation of flexible space manipulator based on vector paris method[J].Aerospace Control and Application, 2016,42(02):26-31.
EffectsofClearanceonSpaceManipulator
LIU Feng, ZHANG Yucui, ZHANG Huihui
(KeyLaboratoryofMechanicalReliabilityforHeavyEquipmentsandLargeStructuresofHebeiProvince,YanshanUniversity,Qinhuangdao066004,China)
In order to investigate the effects of joint clearance and flexibility on dynamic behavior of space manipulator, the rigid-flexible coupling models are built on two-degree-of-freedom planar manipulator and seven-degree-of-freedom space manipulator. Furthermore, dynamic amylases of these two models are applied using a non-linear elastic-damper model of the clearance connections. The effects of the clearance and structure flexibility are discussed detailed. The results show that arm flexibility has a little effect on displacement; however the oscillation of angular velocity and angular acceleration areincreasing with the increasing flexibility. Due to the clearance, the impact changes the dynamic characteristics of space manipulator. Kinematic accuracy decreases and the oscillation of angular velocity and angular acceleration increase with the increasing clearance.
dynamics; space manipulator; rigid-flexible coupling; clearance
2017-02-13
TH133
A
1674-1579(2017)06-0054-07
10.3969/j.issn.1674-1579.2017.06.009
张玉翠(1987—),女,硕士研究生,研究方向为机构动力学;刘峰(1977—),男,教授,研究方向为工程结构数值分析;张晖辉(1975—),女,副教授,研究方向为工程力学.
猜你喜欢
建材发展导向(2022年14期)2022-08-19
物流技术与应用(2022年5期)2022-06-17
小资CHIC!ELEGANCE(2022年2期)2022-01-11
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
航空发动机(2020年3期)2020-07-24
汽车零部件(2019年7期)2019-08-16
导航与控制(2019年2期)2019-06-12
中学课程辅导·教师通讯(2018年10期)2018-09-04
延河(2017年7期)2017-07-19
阳光(2017年7期)2017-07-18