MEMS偏航角速度传感器在旋转导弹稳定回路中的应用
2019-06-12 09:31:00于家福邢朝洋朱政强
导航与控制 2019年2期
于家福,邢朝洋,朱政强,孙 鹏
(1.海军装备部驻北京地区第七军事代表室,北京100039;2.北京航天控制仪器研究所,北京100039)
0 引言
偏航角速度传感器主要被用于旋转导弹单通道控制系统的稳定回路(阻尼回路),以增加导弹的等效阻尼系数,输出与弹体偏航轴角速度成比例的正弦波信号。当导弹接近目标时,弹体抖动加大,若无角速度传感器构成的阻尼回路,将导致脱靶量增加。阻尼回路的关键在于偏航角速度传感器[1-4]。
目前,旋转导弹稳定回路采用液浮陀螺或无驱动偏航角速度传感器[5-7]。其中,无驱动偏航角速度传感器是一种依靠弹体自旋转而获得转子(质量)角动量(H)的陀螺。从陀螺的原理可知,陀螺力矩=H×Ω=J×ω×Ω。由于弹体自旋转,滚动轴旋转角速率ω是不断变化的,因而导致陀螺力矩随弹体自旋而产生波动,进而致使偏航角速度的幅值发生波动,正交耦合误差加大,相位也随之产生波动。
为了满足武器系统结构简单、质量小、成本低的发展趋势,旋转导弹稳定回路对MEMS偏航角速度传感器提出了明确需求。
1 偏航角速度传感器的工作原理
如图1和图2所示,稳定回路中的偏航角速度传感器用于测量导弹绕弹体坐标系的横向角速度,并将其作为反馈信号输入到系统中,以改善导弹的阻尼特性。

图1 MEMS偏航角速度传感器的工作原理示意图Fig.1 Working principle of MEMS yaw rate sensor
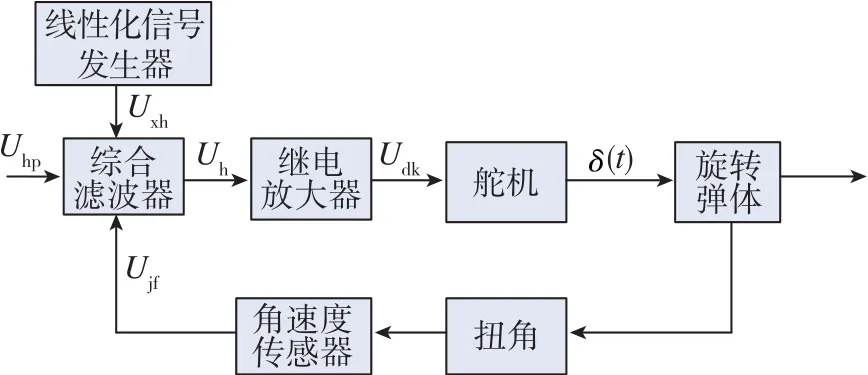
图2 稳定回路的结构框图Fig.2 Diagram of the stabilization loop
旋转导弹单通道控制系统有自身的特点,控制信息要求以幅值、相位、频率来进行描述。输入信号频率与导弹自旋频率需严格一致,信号在传递过程中不允许产生相位畸变。因此,对稳定回路中角速度传感器的输出要求如图3所示。
当弹体滚动轴方向以˙φ的角速度旋转,偏航轴方向又有角速度Ω输入时,偏航角速度传感器将感受到周期性变化的哥氏力,其输出可表示为

式中,Vout为角速度传感器输出,单位为V;K0为角速度传感器零位,单位为V;K1为角速度传感器的比例系数, 单位为 V/[(°)/s];Ω为偏航轴向输入角速度,单位为(°)/s;˙φ为滚动轴向弹旋频率,单位为Hz;φ为角速度传感器输出初始相位,单位为rad。

图3 MEMS偏航角速度传感器的期望输出Fig.3 Expected output of MEMS yaw rate sensor
2 偏航角速度传感器的设计
2.1 偏航角速度传感器的总体设计方案
MEMS偏航角速度传感器用于敏感弹体偏航/俯仰轴向的角速度信号,在设计时采用了敏感轴向在平面内的振动轮式结构MEMS陀螺的方案,如图4所示。
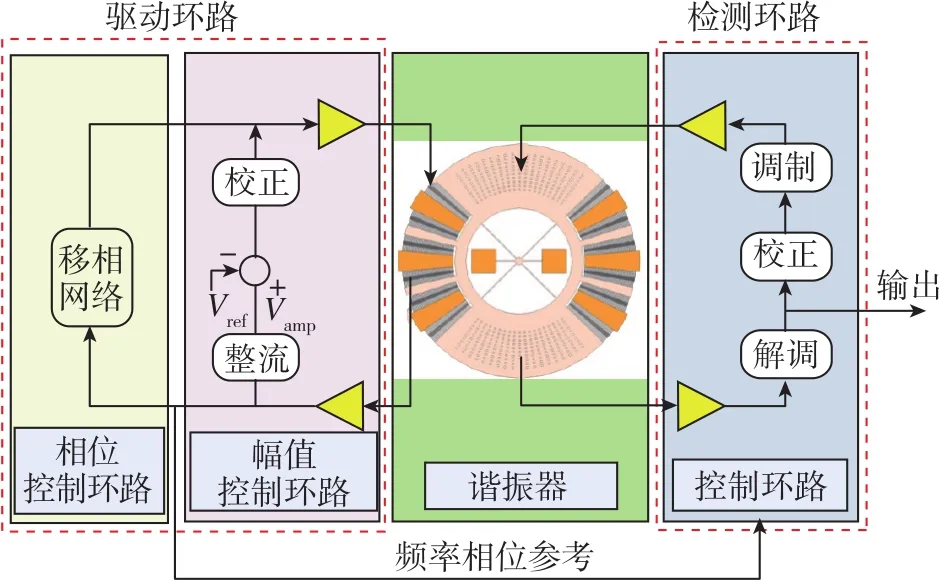
图4 MEMS偏航角速度传感器总体方案Fig.4 Whole technical scheme of MEMS yaw rate sensor
MEMS陀螺的驱动环路采用了幅值闭环和相位闭环的双闭环控制回路设计,检测环路采用了开环检测的方案,简化了MEMS陀螺检测环路的电路设计。
检测环路还包括了幅值调节、相位调节等环节,以实现在滚动轴高速旋转条件下的偏航轴向角速度测量。
2.2 偏航角速度传感器的数学模型
建立偏航角速度传感器的数学模型,采用频域分析法进行分析,分析结果如图5所示。可以看出,在6Hz~13Hz小范围内,幅值和相位特性工作在平坦段,满足使用要求。

其中,Vout为偏航角速度传感器输出,单位为V;Ω为输入角速率, 单位为(°)/s。

图5 MEMS偏航角速度传感器的频率特性曲线Fig.5 Frequency characteristic curve of MEMS yaw rate sensor
2.3 偏航角速度传感器的测试数据
将MEMS偏航角速度传感器安装在双轴转台上进行性能测试。在试验时,滚动轴方向设定3600(°)/s(10Hz)的角速率, 偏航轴方向分别设定30(°)/s、 60(°)/s、 90(°)/s、 120(°)/s、 180(°)/s, 记录下MEMS偏航角速度传感器的输出,如图6所示。
在试验时,滚动轴方向分别设定为2160(°)/s、2520(°)/s、 2880 (°)/s、 3240 (°)/s、 3600 (°)/s、3960(°)/s、 4320(°)/s、 4680(°)/s(6Hz~13Hz)的角速率,偏航轴方向设定50(°)/s,记录下MEMS角速度传感器的输出幅值和相位随弹旋频率的变化,如图7和图8所示。

图6 MEMS偏航角速度传感器双轴转台性能测试Fig.6 Performance test of MEMS yaw rate sensor on two-axis rate turn table

图7 MEMS偏航角速度传感器的输出幅值随弹旋频率的变化Fig.7 Variety of output amplitude of MEMS yaw rate sensor along with rolling rate

图8 MEMS偏航角速度传感器的相位滞后随弹旋频率的变化Fig.8 Variety of phase delay of MEMS yaw rate sensor along with rolling rate
3 MEMS偏航角速度传感器的应用研究
3.1 正交耦合误差分析
MEMS偏航角速度传感器用于弹体偏航(俯仰)轴向角速率的测量,非敏感轴向随弹体以较高的滚动角速率高速旋转。由于MEMS偏航角速度传感器的安装误差,在实际工作中,滚动轴方向的大角速率将会被耦合到MEMS偏航角速度传感器的敏感轴方向,即出现滚动轴向与偏航轴向或俯仰轴向间的正交耦合误差,如图9所示。
这样的日子大约持续了一周左右,李小树才打来一个电话,我接通电话的时候,话筒里满是“沙沙沙”的噪音,他的声音就夹杂在其中时断时续地传来。我隐隐约约听到他在电话里说自己已经到达柳江古镇了。我刚“哦”了一声,就看到一辆大红色的蓝博基尼跑车正缓缓地驶进李小树旁边的那幢小洋楼。我站在阳台上一边漫不经心地听着李小树的电话,一边眯着眼睛打量着从小轿车里下来的那女人。
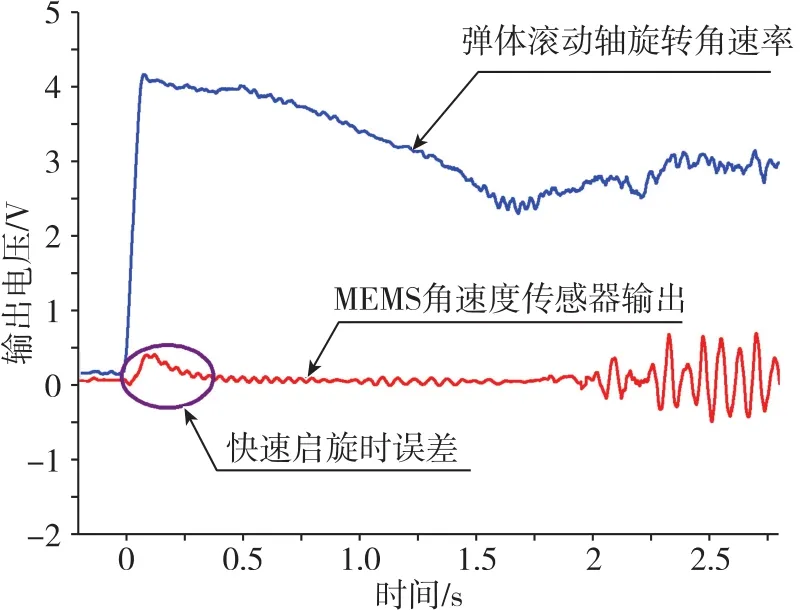
图9 MEMS偏航角速度传感器的正交耦合误差Fig.9 Orthogonal coupling error of MEMS yaw rate sensor
从角速度传感器的工作机理出发,通过大量试验验证,获得的解决措施如下:
1)采用专用焊接设备和工装,保证MEMS陀螺与电路板的装配精度,以及电路板与壳体的装配精度;
2)在电路设计中采取措施抑制正交耦合误差。
3.2 力学环境适应性设计
MEMS偏航角速度传感器安装在驾驶仪电路中,在飞行过程中面临着发射冲击、发动机点火冲击、飞行振动等复杂的力学环境。旋转导弹稳定回路中的冷气乒乓舵机始终以35Hz左右的频率工作,其直接作用在MEMS偏航角速度传感器安装位置处,所面临的力学环境更加恶劣。弹体坐标系及舵面位置关系如图10所示。

图10 弹体坐标系及舵面Fig.10 Missile reference frame and the rudder surface
为了提高MEMS偏航角速度传感器的测量精度,满足任务使用要求,在设计时应考虑以下几点:
1)提高MEMS偏航角速度传感器敏感结构的结构刚度,减小外部力学环境引入的干扰误差;
2)避免MEMS偏航角速度传感器的敏感轴向与舵机转动方向一致,减少舵机转动引入的角振动被输入到MEMS偏航角速度传感器;
3)优化MEMS偏航角速度传感器信号,调整电路设计,减小仪表振动环境下的输出噪声;
通过设计改进,以及针对性的环境试验考核验证,MEMS偏航角速度传感器的力学环境适应性明显提高,在舵偏打力学环境条件下波形畸变被控制在了5%以内。改进前后MEMS偏航角速度传感器在舵偏打条件下的输出对比如图11所示。


图11 MEMS偏航角速度传感器改进前后的输出对比图Fig.11 Outputs of MEMS yaw rate sensor before and after improvement
3.3 正弦性畸变分析
MEMS偏航角速度传感器输出的正弦波信号是否畸变对于控制系统而言至关重要,本文提出了一种电压波形正弦性畸变率(Voltage Harmonic Distortion,VHD)方法,对MEMS偏航角速度传感器输出的正弦信号进行了分析[8]。
输出波形和正弦波形的偏差程度用VHD表示

其中,Um1为有用信号,Um2~Umn为其他高次谐波。
对谐波进行快速 Fourier变换(FFT)或离散Fourier变换(DFT)。为提高性能指标测量准确度和系统抗干扰能力,采用基于谐波分析和周期跟踪技术的方法测量 VHD[9]。
设u(t)为被测电压信号,经过信号调理电路处理后,最高谐波次数为L,展开为Fourier级数
式中,Umn为u(t)的n次谐波的幅值,φn为u(t)的n次谐波的初相位,ω=2π/T为u(t)的周期。

式中,n=1, 2, 3, …,L。
设一个基波周期内采样N次,采样频率为fs。采用DFT算法,对式(5)和式(6)离散化,可以得到n次谐波的实部和虚部,分别为

采用式(7)和式(8),可以求出基波和各次谐波的实部和虚部,这样可以计算其相应的电压幅值,并按式(3)求出 VHD。
4 某型号高速旋转弹飞行试验验证
在某高速旋转弹任务牵引下,MEMS偏航角速度传感器参加了飞行试验。图12为某型号飞行试验中MEMS偏航角速度传感器的遥测输出。可以看出,MEMS角速度输出与弹旋频率同频率的正弦波信号,达到了设计预期。
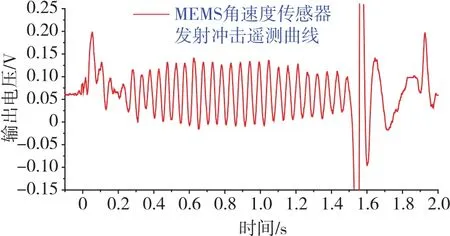
图12 MEMS偏航角速度传感器的遥测输出Fig.12 Output of MEMS yaw rate sensor
5 结论
针对旋转导弹稳定回路对MEMS偏航角速度传感器的需求,本文提出了一种全新的MEMS偏航角速度传感器技术方案,实现了稳定回路的闭环控制。通过MEMS偏航角速度传感器的方案设计,以及地面环境适应性考核,提高了MEMS偏航角速度传感器的测量精度,使其能够满足旋转导弹偏航角速度的测量要求。如何进一步抑制MEMS偏航角速度传感器的输出信号噪声,是下一步工作的重点。
猜你喜欢
兵器装备工程学报(2022年7期)2022-08-10 03:37:18
爆炸与冲击(2022年2期)2022-03-17 07:28:44
小学生学习指导(低年级)(2019年10期)2019-10-16 08:12:34
学生天地(2019年6期)2019-03-07 01:10:46
军事文摘(2018年24期)2018-12-26 00:58:18
快乐语文(2018年36期)2018-03-12 00:56:02
上海煤气(2018年6期)2018-03-07 01:03:22
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
火控雷达技术(2016年1期)2016-02-06 02:18:01
中国铁道科学(2015年4期)2015-06-21 06:46:06