
脉冲调制在小型姿控推力器中的应用仿真*
2018-01-04 07:50:11李新洪贺广松安继萍张治彬
空间控制技术与应用 2017年6期
王 谦,李新洪,贺广松,安继萍,张治彬
(航天工程大学,北京 101416)
脉冲调制在小型姿控推力器中的应用仿真*
王 谦,李新洪,贺广松,安继萍,张治彬
(航天工程大学,北京 101416)
针对采用推力器进行姿态控制过程中的姿态稳定度和燃料消耗优化问题,对脉冲调宽调频(PWPF)和伪速率脉冲(PSR)调制器进行详细介绍,分别对采用PWPF调制器和PSR调制器的姿控推力器姿态控制进行仿真分析,总结采用上述两种调制器的优缺点.以采用双时间常数的方法降低燃料消耗,加入一阶惯性滤波的方法降低系统噪声影响从而提高姿态控制稳定度,设计一种改进的脉冲调制器.通过仿真表明采用改进的脉冲调制器相比于采用PWPF调制器更节省燃料,且姿态稳定精度相当,相比于PSR调制器,改进的脉冲调制器显著提高了姿态稳定精度.
姿控推力器;脉冲调制器;双时间常数;惯性滤波
0 引 言
在空间复杂环境中,采用喷气推力器进行姿态控制,不受外界环境影响,并且推力器沿航天器惯量主轴产生的控制力矩远大于耦合力矩,可以实现三轴姿态解耦,降低控制的复杂程度等.因此,在姿态控制系统中,常采用喷气推力器实现姿态控制的目的.喷气推力器的工作原理是通过尾喷管喷射出高速工质,根据牛顿第三定律,在反作用力的激励下,改变航天器姿态.
现阶段,由于变推力推力器的研发还处于试验阶段,在工程实际中应用还存在较大的困难.因此,目前在姿态控制系统中一般都采用恒定推力的开关式推力器.近年来,随着制造技术的发展,长寿命高可靠度/重复性能好的推力器系统投入使用,其开关次数都可达数百万次.但由于推力器系统存在死区和滞后,因此常按照非线性的继电系统对其进行分析,通常采用脉冲调制技术将连续控制量进行离散.常用的脉冲调制技术有施密特触发器、脉宽调制器(PWM)、伪速率脉冲调制器(PRS)和脉冲调宽调频调制器(PWPF)[1].文献[2]提出了脉冲调制理论,指出了采用该技术能够对航天器进行有效的最优控制;文献[3]综合考虑了PWPF调制器的线性工作区和燃料消耗,对PWPF调制器在空间动能拦截器的末端制导应用上作了研究.文献[4]设计了一种双时间常数的伪速率调制器,利用PSO算法综合考虑了时间最优和燃料最优两项指标.
文章在对施密特触发器、PWPF调制器和PSR调制器在姿控推力器中的应用进行了仿真分析,发现PWPF调制器和PSR调制器在燃料消耗和控制精度方面各有不足,因此,在PSR调制器的基础之上进行了改进,从而使控制精度更高,燃料消耗较少.
1 常用的几种脉冲调制器
1.1 施密特触发器
施密特触发器也称为带有死区和滞环的继电器,这种调制方式是最简单的脉冲调制器.用施密特触发器控制时,直接将控制律输入触发器,经触发器后可输出用于控制推力器开关的脉冲序列,进而达到姿态控制的目的.该系统在早期应用于航天器的姿态控制,它的优点是结构简单,但是由于其静态参数都与航天器的转动惯量有关,而航天器的转动惯量在轨运行过程中并不恒定,因而若只采用标称值设计的控制律难以适应实际的控制要求,所以,只采用施密特触发器组成的脉冲调制系统通用性差,在实际应用中具有较大的局限性.图1为施密特触发器控制系统原理图.
图1中,a(t)为输入量,uon和uoff分别是继电器的开和关的门限值,τ为开关切换线斜率,Tc为输出控制量,w为干扰力矩.
施密特触发器的最小脉冲宽度:

(1)
稳态时极限环[5-6]的幅值L为:
(2)
极限环的周期:
(3)
其中,h为滞环系数,h=uon-uoff.
1.2 PWPF调制器
PWPF调制器可对脉冲的频率和宽度进行自动调制,把开关控制量等效为连续型控制量.PWPF调制器相当于在施密特触发器之前串联一个一阶惯性环节.当输入一个信号时,PWPF可输出一个占空比与输入信号幅值近似成线性关系的脉冲序列.由于存在反馈,PWPF调制器的静态参数与航天器的参数无关,但又因为存在一阶惯性环节,调制器存在滞后.
图2所示为PWPF脉冲调制器的原理图.
图中,Km和Tm分别为一阶惯性环节的放大系数和时间常数,L为继电器脉冲幅值,a为连续型输入量.
在输入量a的驱动下,调节器的动态特性可用对应于继电器开和关状态下的微分方程分别表示为:
(4)
对于一个脉冲而言,a可以近似为一个幅值为L的常值,解方程可得:
若t=0,u=uon,
(5)
若t=0,u=uoff,
(6)
利用式(5)~(6)得到PWPF调制器的静态参数
脉冲宽度Ton为
(7)
间隙宽度Tof为
(8)
脉冲周期为
T=Ton+Toff
(9)
当输入很小时(满足a≤uon/Km),则不能驱动继电器产生脉冲输出,此时Toff将趋于无穷大.反之,当a>uon/Km时才会有脉冲输出,并且当a=uon/Km时脉冲宽度最小,将此时的脉冲宽度称为死区宽度,记作ad;同理,当a≥L+uoff/Km时调制器将不再输出周期性的脉冲,而是输出为常值L,此时的脉冲宽度称为饱和区宽度,记作as.
则最小脉冲宽度可表示为:
(10)
1.3 PSR调制器
PSR调制器的结构与PWPF的结构相似,但一阶惯性环节在反馈通道,用于补偿施密特触发器的输出,其原理如图3所示.
PSR调制器输出脉冲的宽度和相邻脉冲的间隙宽度随输入信号而改变,脉冲宽度为[7]:
(11)
间隙宽度为:
(12)
脉冲周期:
T=Ton+Toff
(13)
最小脉冲宽度:

(14)
对于推力器系统来说最小脉冲宽度受推力器性能的限制,目前可达到毫秒级.要选择推力器的参数,就是要确定uon、uof和Δ,进而确定Km、Tm,uon、uoff和Δ的理想情况是希望它们的值越小越好,然而这些参数都取决于推力器的性能.
施密特脉冲调制器本身存在局限,且通用性不佳,PWPF调制器和PSR调制器的结构相似,并且其静态特性具有相同之处,不难发现,PSR是PWPF的改进,它不仅继承了PWPF随输入信号变化而改变输出脉冲宽度与频率的优点,同时提供相位超前的性能.图4为PSR与PWPF的关系图,由此可以看出,PWPF是PSR的一个基本环节,可以在PWPF之前串联一个比例积分环节得到PSR调制器.
2 PWPF和PSR调制器在姿控推力器中的仿真分析
建立如图5所示的姿态控制系统进行仿真分析.
2.1 仿真条件
通过使用脉冲调制器控制推力器使其达到三轴稳定的效果,选择使用六推力器的姿控系统,采用传统的PD控制律,其中反馈增益系数3个轴的都相等,取K1=[50 50 50]T,K2=[6 6 6]T进行仿真,推力器的安装布局及推力大小如表1所示.
表1 各推力器安装布局及推力大小Tab.1 The installation layout and thrust
在仿真过程中,脉冲调制器的参数参照文献[8],取Km=10,Tm=1,uon=0.09,uoff=0.04;航天器的转动惯量为J=diag{50,40,80}kg·m2.假设初始姿态角和初始姿态角速度都为0,期望姿态角为[20 25 35]°,期望姿态角速度为0.仿真步长取0.1 s,共仿真6 000 s.
2.2 采用PWPF调制器的仿真结果
由图6~10可以看出,采用PWPF调制器,对于姿态控制系统而言,姿态稳定的精度较高,在0.05°之内,但是它的缺点是在姿态控制过程中,推力器频繁开关,容易造成推力器的喷嘴污染,并且采用该种调制器燃料消耗较多.
2.3 采用PSR调制器的仿真结果
由图11~15可以看出,姿态系统中的推力器采用PSR调制器进行控制,优点是比较节省燃料,同时避免了推力器的频繁开关,可增加推力器的可靠度,但缺点是采用该种方法控制的姿态稳定精度低,在0.5°之内.
3 改进的脉冲调制器
虽然采用PSR调制器很大程度上节省了推力器的燃料,但是其致命缺点是控制精度低,为了解决这个不足,对PSR调制器做出以下改进.
3.1 采用双时间常数的PSR调制器
其原理如图16所示.
其中Km和Tm与上文相同,为一阶惯性环节的增益和时间常数.PSR调制器的反馈回路中,采用双时间常数,目的是为了降低在控制过程中对燃料的消耗,其中To表示在推力器工作时的时间常数,Tc表示在推力器处于关闭状态时的时间常数.在推力器工作时,取较小的时间常数To,会使得反馈信号会立即被跟踪,而当推力器关闭时,取较大的时间常数,反馈信号不会立刻被跟踪,因而推力器不会马上开启或关闭,从而避免了推力器频繁开关,起到节省燃料的作用.当To≪Tc时,对节省燃料可以起到显著作用.
3.2 在PSR调制器之前加入一阶惯性滤波环节
由于在姿态确定系统中使用了敏感器,一般这些敏感器都会给系统引入噪声,而采用PSR调制器对推力器控制时,会对这些噪声放大,导致姿态控制的精度降低.为了防止姿态敏感器噪声对控制系统性能产生严重的有害影响,因此在PSR调制器反馈回路之前加入一个低通滤波器,其原理如图17所示.
但是对于一阶惯性滤波器而言,滤波系数越小,滤波结果越平稳,但是灵敏度会降低;而滤波系数越大,灵敏度越高,但是滤波结果不稳定.可见,在传统的一阶惯性滤波器中,灵敏度和平稳性是相互矛盾的,往往顾此失彼.为了解决这个矛盾,对传统的一阶惯性滤波器进行改进,采用动态调整滤波系数的方法,进行分段滤波.
动态调整一阶滤波系数的算法应该实现以下功能:
1)在姿态控制的初始阶段,姿态变化快,为了达到快速高效,要求滤波的结果能及时跟进,此时要求灵敏度优先;
2)在航天器姿态逐步跟踪上控制指令之后,此时推力器的目的是控制姿态稳定下来,因此要求滤波的结果能趋于平稳,使平稳性优先.
对一阶惯性滤波器进行改进,采用两种滤波系数,对于滤波系数切换的时机,可根据工程经验,确定某一阈值当姿态误差处于该阈值之内时,进行滤波系数切换.在姿态控制初始阶段采用滤波系数较大的滤波器,而在姿态跟踪上控制指令之后,采用滤波系数较小的滤波器,以到达航天器姿态的精确控制.
基于上述情况,本文设计了一种改进型的脉冲调制器,结合了PWPF调制器控制精度高和PSR调制器节省燃料的优点,其原理如图18所示.
3.3 改进的脉冲调制器在姿控推力器中的仿真
采用和2.1相同的仿真条件对使用改进的脉冲调制器控制的推力器的姿态控制系统进行仿真,仿真过程中取双时间常数分别取To=1,Tc=1 000,取滤波系数切换时姿态误差阈值为Δ=1°,姿态分段滤波系数分别取Kq=10,Ks=1.结果如下:
表2对PWPF、PSR和改进型脉冲调制器控制下的推力器喷气时间和控制精度两个方面进行了对比,可以看出,采用改进型脉冲调制器控制相对于PSR调制器,提高了控制精度,相较于PWPF调制器,缩短了推力器的喷气时间,避免了推力器的频繁开关.
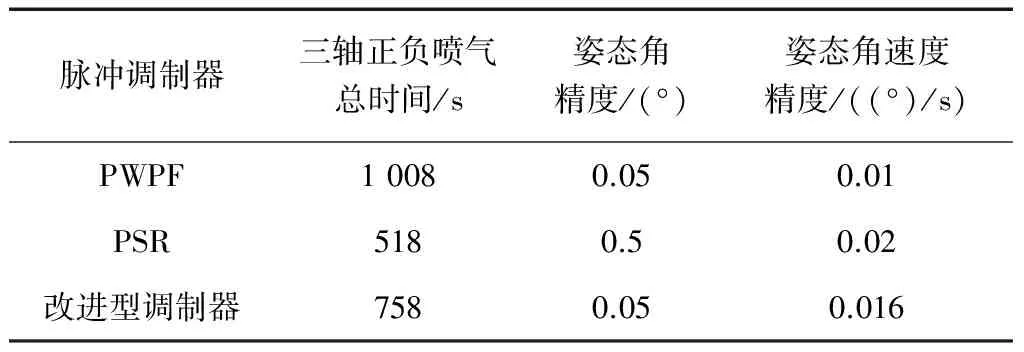
脉冲调制器三轴正负喷气总时间/s姿态角精度/(°)姿态角速度精度/((°)/s)PWPF10080.050.01PSR5180.50.02改进型调制器7580.050.016
4 结 论
通过对采用PWPF和PSR脉冲调制器的姿控推力器姿态控制仿真分析,得到了采用PWPF和PSR调制器的优缺点,为了使姿态控制稳定精度更高,燃料消耗更少,设计了一种改进型脉冲调制器,仿真结果表明,采用改进的脉冲调制器比使用PWPF调制器更省燃料,比使用PSR调制器姿态控制稳定度更高,验证了该调制器的有效性.
但是本文在仿真过程中,只是进行了定性分析,并没有对调制器参数的选择做详细的分析,下一步将继续研究如何从理论层面给出调制器参数的选择方法.
[1] 郭清晨. 常值推力姿态控制方法研究[D].哈尔滨:哈尔滨工业大学,2006.
GUO Q C. Research of constant thrust attitude control method[D]. Harbin Institute of Technology, 2006.
[2] NICKLAS J C, VIVIAN H C. Derived-rate increment stabilization: its application to attitude control problem[J]. Journal of Fluids Engineering,1962,84(1):54-60.
[3] 王清,杨宝庆,马克茂. 一种优化PWPD调节器在动能拦截器末制导中的应用研究[J]. 宇航学报,2005,26(5):576-580.
WANG Q, YANG B Q, MA K M. PWPF optimizing design and its application research to terminal guidance of kenetic killing vehicle[J]. Journal of Astronautics, 2005, 26(5):576-580.
[4] 黄誉,王新民. 基于改进PSO的双时间常数伪速率脉冲调制器设计[J]. 控制与决策,2016,31(1):123-129.
HUANG Y, WANG X M. Design of double-time-current pseudo rate modulator based on improved PSO algorithm[J]. Control and Decision, 2016,31(1):129-129.
[5] 屠善澄,卫星姿态动力学与控制(2)[M]. 北京:中国宇航出版社.2005:167-186.
[6] 章仁为. 卫星轨道姿态动力学与控制[M]. 北京:北京航空航天大学出版社. 1998:247-249.
ZHANG R W. Dynamics and control of satellite orbit and attitude[M]. Beijing: Beihang University press, 1998:247-249.
[7] SCOTT E D. Pseudorate sawtooth-pulse-reset control system analysis and design[J]. Journal of Spacecraft and Rocket, 1967,4(6):
[8] 黄圳圭. 卫星姿态动力学[M]. 长沙:国防科技大学出版社,1997.
HUANG Z G. Satellite attitude dynamics [M]. Chang Sha: National University of Defence Technology Press, 1997.
ApplicationSimulationofPulseModulationinSmallAttitudeControlThruster
WANG Qian, LI Xinhong, HE Guangsong, AN Jiping, ZHANG Zhibin
(AerospaceEngineeringUniversity,Beijing10416,China)
Aming at the problems of attitude stability and fuel consumption optimization in the process of attitude control using thrusters, a detailed introduction is made on pulse-width pulse-frequency (PWPF) pulse modulator and pseudo rate modulator (PSR).The attitude control laws designed with PWPF and PSR modulators are simulated and analyzed respectively, and then the advantages and disadvantages of the two modulators are summarized. By using double time constant to reduce fuel consumption, adding a first-order inertial filter to reduce the influence of noise so as to improve the attitude control stability, an improved pulse modulator is designed. The simulation results show that the proposed modified pulse modulator is fuel economic and with the same attitude accuracy compared to PWPF modulator. Moreover, the modified pulse modulator significantly improves the accuracy of attitude stabilization compared to PSR modulator.
attitude control thruster; pulse modulator; double time constant; inertial filter
*国家自然科学基金资助项目(51605489).
2017-08-03
TP391
A
1674-1579(2017)06-0040-07
10.3969/j.issn.1674-1579.2017.06.007
王谦(1993—),硕士研究生,研究方向为航天器应用技术;李新洪(1972—),教授,研究方向为航天器应用技术;贺广松(1992—),硕士研究生,研究方向为航天器应用技术;安继萍(1993—),硕士研究生,研究方向为航天器应用技术;张治彬(1995—),硕士研究生,研究方向为航天器应用技术.
猜你喜欢
军民两用技术与产品(2022年10期)2022-11-30 07:13:16
装备制造技术(2021年1期)2021-05-21 07:54:44
重型机械(2019年3期)2019-08-27 00:58:52
自动化学报(2018年2期)2018-04-12 05:46:05
通信电源技术(2016年4期)2016-04-04 02:57:36
深空探测学报(2015年3期)2015-12-07 11:14:55
太空探索(2015年6期)2015-07-12 12:48:42
物探化探计算技术(2014年1期)2014-06-27 01:32:50
电气电子教学学报(2013年1期)2013-07-05 09:41:14
航天器工程(2012年6期)2012-12-29 04:13:44
