
收获粉碎式秸秆压块打包一体机的设计
2017-12-16 02:48陈立东孙明伟李亚婧杨宗炜杨彩媛李学永刘荣昌周彦礼
农机化研究 2017年4期
陈立东,孙明伟,薛 飞,李亚婧,杨宗炜,杨彩媛,李学永,刘荣昌,周彦礼
(1.河北科技师范学院 机电工程学院,河北 秦皇岛 066600;2.滦南县职业教育中心,河北 滦南 063500;3.河北广电网络信息集团股份有限公司 滦南分公司,河北 滦南 063500;4.倴城镇中心学校,河北 滦南 063500;5.唐山鑫万达实业股份有限公司,河北 滦南 063500;6.滦南县工业和信息化局,河北 滦南 063500)
收获粉碎式秸秆压块打包一体机的设计
陈立东1,孙明伟1,薛 飞1,李亚婧2,杨宗炜3,杨彩媛4,李学永5,刘荣昌1,周彦礼6
(1.河北科技师范学院 机电工程学院,河北 秦皇岛 066600;2.滦南县职业教育中心,河北 滦南 063500;3.河北广电网络信息集团股份有限公司 滦南分公司,河北 滦南 063500;4.倴城镇中心学校,河北 滦南 063500;5.唐山鑫万达实业股份有限公司,河北 滦南 063500;6.滦南县工业和信息化局,河北 滦南 063500)
针对国内秸秆打包机不能进行田间收获打包作业的现状,设计了收获粉碎式秸秆压块打包一体机。以73.5kW拖拉机作为牵引机,利用捡拾收割装置进行秸秆捡拾收获,通过二次粉碎抛送装置完成秸秆的二次粉碎与抛送,实现了秸秆的田间收获压块打包作业。田间试验表明:该机捡拾收获效果良好,损失率低,作业效率达到了2.84t/h,草捆密度133.4kg/m3,满足农作物秸秆收获作业要求,为秸秆综合利用提供了技术支持。
农作物秸秆;收获;压捆;装包;捡拾
0 引言
农作物秸秆作为一种可再生资源,我国产量丰富,每年约有8.4亿t以上[1-4]。目前,国内农作物秸秆的综合利用率还很低,大部分秸秆被废弃或就地焚烧,不仅浪费了资源、污染了环境,甚至带来了很大的安全隐患。由于农作物秸秆具有体积大、质量轻、形状极为不规则及贮运困难等特点,不利于秸秆的综合利用,因此需要首先解决秸秆的收集储运问题。为解决上述问题,近年来国内针对秸秆打包机和秸秆压捆机的研究越来越多。2008年,江南大学的李倩对稻草秸秆打包机的压缩过程及压缩性进行了系统的试验研究与分析,并设计了秸秆打包机及液压系统[5]。西北农林科技大学的祝明雪于2009年完成了玉米鲜秸秆压缩打捆特性及装备的试验研究,通过计算和分析,设计出了秸秆压缩打捆试验装置,为秸秆打包设备压缩机构的结构设计提供了基础[6]。海南大学的张浩栋等设计了一种基于PLC的香蕉秸秆自动打包机,实现了香蕉秸秆的自动打包作业[7]。上述研究大多是针对固定式秸秆打包机压缩机构及其液压控制进行设计,田间收获粉碎式秸秆压块打包机方面的研究还很少。为此,提出了一种用于田间收获作业的牵引式农作物秸秆压块打包一体机。
1 总体结构设计
1.1 技术要求
要求能实现站立或倒伏秸秆的田间收获粉碎,同时实现压块成型并装包作业。整机作业状态外观尺寸为5 000mm×2 400mm×3 320mm,牵引动力73.5kW,切碎长度15~25mm(可调),生产率2~4t/h(干黄秸秆),作业幅宽2.2m,行距不受行限制,成捆率95%,压缩密度130kg/m3。
1.2 总体结构
收获粉碎式秸秆压块打包一体机由捡拾收割机构、输送喂入系统、二次粉碎抛送装置、液压控制系统、计量控制装置、压缩成型系统及出料装包装置等组成,其基本结构如图1所示,样机如图2所示。

1.抛料筒 2.发动机 3.二次粉碎抛送装置 4.捡拾切割装置 5.仿形辊 6.出料装包装置 7.液压控制系统 8.压缩装置

图2 收获粉碎式秸秆压块包裹一体机样机
工作时,通过拖拉机牵引进行田间收获作业,同时利用拖拉机动力输出轴的动力带动锤爪式捡拾机构将秸秆(站立或倒伏)收割捡拾,并通过后续的切碎装置和抛送装置进行切碎、抛送。工作时, 捡拾切割机构将秸秆连续地切割、捡拾、揉搓,并通过喂入叉将秸秆丝抛入输送喂入装置;二次粉碎抛送装置将切碎物料进行二次粉碎破节,并通过抛料筒抛送至压缩机构,在压缩室内由活塞进行压缩,实现压实、成块,最后由推料缸推出并进行装袋。
2 主要部件设计
2.1 锤爪式捡拾割台的设计
捡拾揉搓机构由锤爪式滚筒、定刀片、滚筒壳体、螺旋输送器及筛孔式输送器壳体等组成,其功能是把牧草或农作物秸秆收割、捡拾、揉搓成丝状物,然后由螺旋输送器输送至粉碎抛送机构,结构如图3所示。

图3 捡拾揉搓机构
2.1.1 锤爪式滚筒
锤爪式滚筒是捡拾揉搓机构的主要部件,由带固定刀片的滚筒壳体、锤爪式割刀及动刀片等组成。锤爪刀片采用高铬锰合金材料,以提高抗冲击和耐磨性。锤爪的疏密要保证将秸秆切割捡拾干净,通常间距为63~100mm。其布置采用螺旋形排列布置方式,在螺旋方向上布置19个锤爪,可以保证切割和捡拾,不致漏捡。
2.1.2 滚筒转速的确定
为保证物料的清洁度,滚筒工作时需要有一定离地间隙。同时,为减小秸秆捡拾损失,需要有降低捡拾滚筒的离地高度。捡拾滚筒的转速与机器前进速度的关系为[8]
(1)
其中,n为滚筒转速(r/min);vm为机器前进速度(m/s);r为销轴所在旋转半径(m);l为锤爪长度;γ为销轴与旋转中心连线与锤爪间夹角(°)。动力输出轴转速为760r/min,滚筒转速取为450r/min。
2.2 二次粉碎抛送装置的设计
二次粉碎抛送装置的作用是进一步粉碎秸秆物料,提升物料的抛送动能,使粉碎后的物料在风机作用下沿抛料筒抛到压缩室上方的储料斗。切碎刀盘装置采用刀盘和风机叶片一体化设计, 即刀盘座上安装有动刀片和风机叶片, 动刀片数量为5 个或10个, 刀盘座转速为1 300r/min,其基本结构如图4所示。

图4 粉碎抛送装置实物仿真
刀盘座由厚度为15mm、直径为665mm的钢板加工而成,动刀片和风机叶片均匀布置于刀盘座上。 刀片的内外线速度设计为13.6~51.7m/s, 滑切角为42°, 材料为65Mn;刀片厚度为6.4mm, 刃口硬度HRC62~65。
风机叶片外端直径为794mm, 叶片外端线速度为54m/s, 叶片数量为5片, 抛送筒的高度为4.5m。
2.3 压缩装包机构设计
压缩装包机构是捡拾包裹一体机的核心工作部件,功能是将粉碎后的秸秆进行压缩然后装包,装包后将卸于车下。压缩装包机构由机架、料斗、压缩室、压缩机构、液压系统及计量装置等组成,如图5所示。

图5 压块装包机构
2.3.1 上料斗的设计
料斗安装在压缩室的上方,基本结构为圆柱螺旋形,并与抛料筒的出口相连接,料斗的入料口设置在圆形料斗的切线方向上。收获作业时,由抛料筒抛送的物料沿螺旋形轨道高速进入料斗,秸秆物料中的灰尘、杂质在高速气流的作用下由上部出口排除,其基本结构如图6所示。
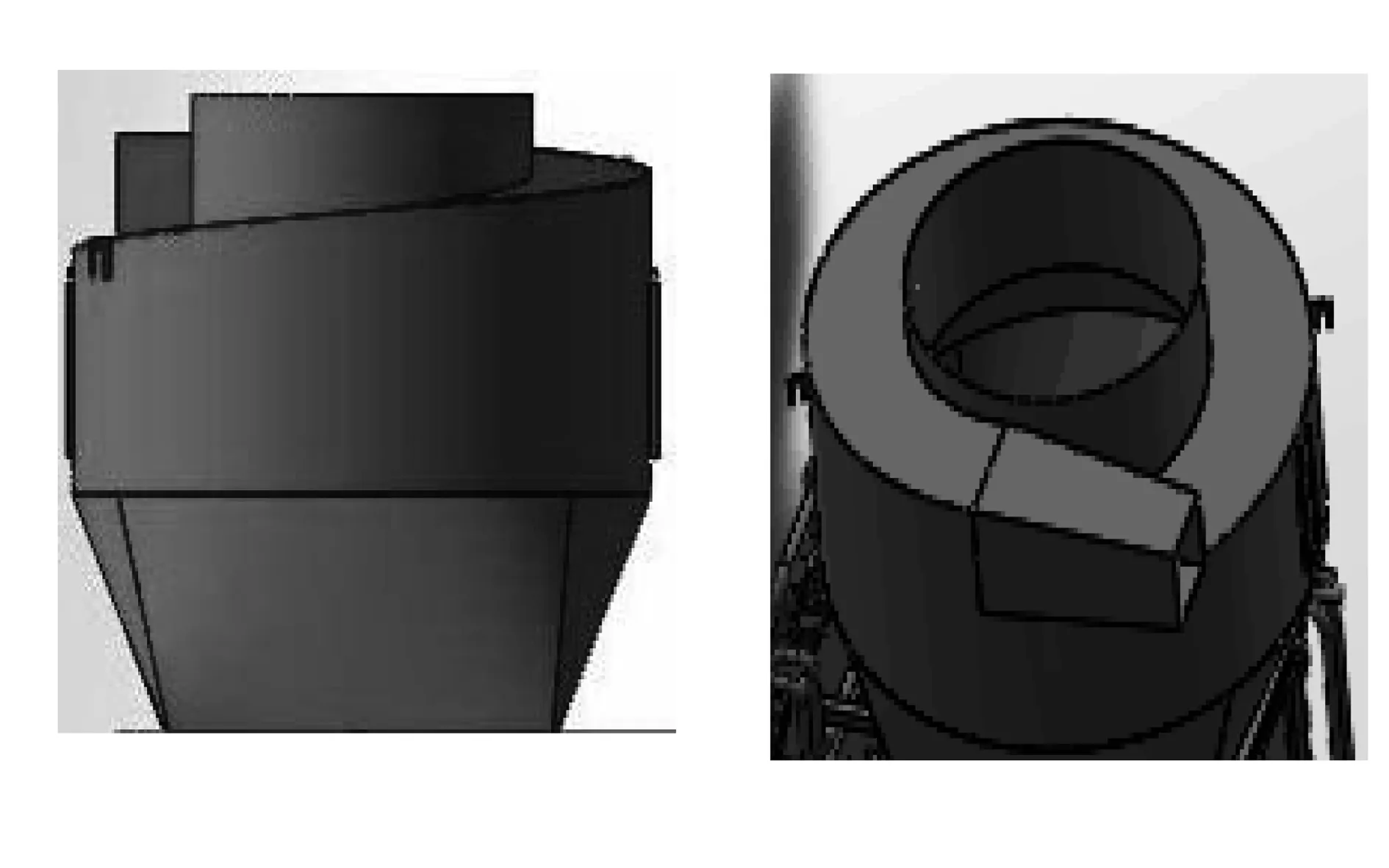
图6 上料斗结构
2.3.2 压缩机构设计
压缩机构主要由压缩室、闸板、压缩板、推板及出口组成。在压缩室内,设计有压缩板和推板,压缩室上边设有料斗,在压缩室和落料斗之间设有闸板。当料斗中的秸秆物料达到设定的计量质量时,闸板在液压缸的推动下启动并将料斗内的物料卸入压缩室,同时封闭落料口;压缩板推动压缩室内的秸秆进行压缩成块,推板将压缩后的秸秆捆从出口推出,压缩机构进入下一个工作循环。压缩室模型如图7所示。
对压缩室进行运用SolidWorks三维软件建立各个零件的模型,并根据各零件的配合关系建立压块机的装配体。根据有限元分析的特点,必须将模型进行简化,去除不必要的相关零件模型,以简化相关运算过程,提高运算效率。根据此设计中的内容,进行压缩室静力学分析及疲劳分析。网格划分及分析结果如图8、图9所示。

图7 压缩室模型

图8 压缩室有限元网格划分

图9 压缩室有限元分析结果
2.3.3 装包装置
经过压缩室压块的秸秆在成型后需要对其进行装包处理,以备运输及发酵。本设计中成型块的装包处理部分位于压缩室的出口处,作用是将包装袋口固定于压缩室出口处,防止在压块被推出时因压块与袋子之间的摩擦将袋子从出口处推落。装包装置基本结构如图10所示。

1.定架 2.固定螺栓 3.旋转压柱 4.弹簧 5.压架
2.3.4 翻转闸板式压缩室入料控制装置
压块翻转闸板控制装置由翻转闸板、液压缸及支架等组成。其工作过程是:由液压缸驱动翻转式圆弧封闭闸板,闸板翻转控制落料口的开启和封闭,且在闸板封闭的同时将压缩室内的秸秆物料进行压缩,其结构如图11所示。
3 田间试验
3.1 测试条件及测试指标
2015年10月,样机在唐山市滦南县西北坨村进行了生产测试。测试条件:环境温度11~17℃;测试秸秆为玉米秸秆,含水率19.3%;测试地块(长×宽)15m×75m;测试评价指标为成捆率、草捆密度、草捆抗摔率、吨草油耗、纯工作小时生产率等。样机测试现场及作业效果如图12、图13所示。

图12 测试现场

图13 测试效果
3.2 测试结果
测试结果如表1所示。

表1 样机测试结果
4 结论
1)研制了收获粉碎式秸秆压块包裹一体机,该机主要由捡拾收割机构、输送喂入系统、二次粉碎抛送装置、液压控制系统、计量控制装置、压缩成型系统及出料装包装置等组成。同时,对捡拾收割机构、二次粉碎抛送装置及压块装包装置等进行了设计,并对压缩机构进行了仿真分析。
2)田间试验表明:样机压捆成型性能良好,捡拾损耗率低,小时生产率达到了2.48t/h,并且实现了自动计量称重,满足了农户对秸秆收获自动计量装包的要求。
[1] 毕于运,高春雨,王亚经,等.中国秸秆资源数量估算[J].农业工程学报,2009,25(12):211-217.
[2] 邓华,敖宁建,孙蓉,等.利用秸秆纤维制备环境材料的研究进展[J].高分子材料与工程,2009,25(12):169-172.
[3] Pan Mingzhu, Zhou Dingguo, Zhou Xiaoyan, et al.Improvement of straw surface characteristic via thermomechanical and chemical treatments[J]. Bioresearch Technology, 2010, 101(21): 7930-7934.
[4] 国家发展改革委,农业部,财政部."十二五"农作物秸秆综合利用实施方案[EB/OL].(2011-11-29).http://baike.baidu.com/link?url=VGctZmj_RhSq2Gl1qXh4LP2Z SDTJjRlQa9A5ZsFWyzb1bNOnM1OH2ryAEQJGpKu1NOzI8 JOr4gotMNXzr_Pyga.
[5] 李倩.秸秆打包机的分层叠压技术研究 [D].无锡:江南大学,2008.
[6] 祝明雪.玉米鲜秸秆压缩打捆特性及装备的试验研究[D].杨凌:西北农林科技大学,2009.
[7] 张浩栋,张燕,曾小英,等.基于PLC的香蕉秸秆自动打包机的设计和控制研究[J].食品与机械,2013,29(4):115-117.
[8] 王锋德,陈志,王俊友,等.4YF-1300 型大方捆打捆机设计与试验[J].农业机械学报,2009, 40(11):36-41.
Design of the Straw Bale Packing Machine with Crushing Type
Chen Lidong1, Sun Mingwei1, Xue fei1, Li Yajing2, Yang Zongwei3, Yang Caiyuan4, Li Xueyong5, Liu Rongchang1, Zhou Yanli6
(1.Hebei Normal University of Science & Technology, Mechanical and Electrical Engineering College, Qinhuangdao 066600, China; 2.Luannan County Vocational Education Center, Luannan 063500, China; 3.Hebei Radio and Television Network Information Group Co. Ltd. Luannan branch, Luannan 063500, China; 4.Ben Town Center School, Luannan 063500, China; 5.Tangshan Xinwanda Industrial Co. Ltd., Luannan 063500,China; 6.Industry and Information Technology Bureau of Luannan County, Luannan 063500, China)
Aiming at the situation of the domestic straw baler unable to be packed in a harvest field, a harvest crushing straw baler with packing device is designed. The machine makes a 73.5kW tractor as its traction machine, and it harvests the straws with its picking and reaping device; and it completes the stalks of secondary crushing and throwing through a secondary crushing throwing device. The machine achieves the field straw harvest works with bailing and packing operation. The field test shows that the effect of picking up is good, and it has a low loss harvesting rate. The work efficiency reaches 2.84 t/h, and the balers density is 133.4kg/m3. The machine is satisfies the requirements of crop straw harvesting, and provides a technical support for the comprehensive utilization of the straw.
crop straw; harvesting; baling; pack; pick up
2016-05-19
国家农业科技成果转化项目(2013GB2A200044)
陈立东(1973-),男,河北唐山人,副教授,(E-mail)chentian-940308@163.com。
S226.9
A
1003-188X(2017)04-0098-05
猜你喜欢
幼儿教育(2022年10期)2022-10-28
机械工程师(2022年4期)2022-04-28
中国设备工程(2022年7期)2022-04-20
有色金属加工(2022年1期)2022-02-25
幼儿教育·父母孩子版(2021年6期)2021-08-05
水泥技术(2021年1期)2021-02-04
安徽工业大学学报(自然科学版)(2020年4期)2020-12-26
计算机辅助工程(2019年1期)2019-07-09
天然气工业(2019年4期)2019-05-13
船海工程(2018年1期)2018-03-01
