
木薯收获机块根拔起机构自适应控制算法研究
2017-12-16 02:48陈科余
农机化研究 2017年4期
郑 贤,陈科余,杨 望,杨 坚,李 杨
(广西大学 机械工程学院,南宁 530004)
木薯收获机块根拔起机构自适应控制算法研究
郑 贤,陈科余,杨 望,杨 坚,李 杨
(广西大学 机械工程学院,南宁 530004)
针对挖拔式木薯收获机无法根据木薯块根生长情况和土质情况的变化实现精确控制木薯块根拔起,且在木薯块根生长情况和土质情况变化大时其块根拔断损失率高的情况,采用联合仿真技术,以较优块根拔起速度模型为基础,根据拔起力变化,控制木薯收获机拔起速度使其达到减少块根拔断损失率的目标,对木薯块根拔起过程进行模糊PID自适应控制,且对模糊PID自适应控制算法进行了优化和物理试验验征。结果表明:在木薯块根拔起过程中,优化的模糊PID控制算法能使齿轮齿条摆动液压缸转速很好地跟踪给定转速曲线,且整机的自适应控制效果好,能适应不同的工作载荷。
木薯收获机;拔起机构;自适应控制算法;优化
0 引言
木薯作为我国南方重要的经济作物,长期以来其收获主要以人工挖拔为主,效率低、劳动强度大,采用机器完成木薯块根的收获可达到省时、省力和高效的目的。挖拔式的木薯收获机对土壤的适应性强、功耗小[1],但目前由于无法根据木薯块根生长情况和土质情况的变化实现木薯块根拔起的精确控制,在木薯块根的生长情况和土质情况变化大时,其块根拔断损失率高。为了适应在木薯块根生长情况和土质情况变化较大的田块中作业,减少挖拔式木薯收获机的块根拔断损失率,采用联合仿真技术,以较优块根拔起速度模型为基础,根据拔起力的变化,控制木薯收获机拔起速度的方案,对木薯块根拔起过程进行模糊PID自适应控制,且对模糊PID自适应控制算法进行优化,实现在木薯块根生长情况和土质情况变化大的条件下对木薯块根拔起过程进行高精度控制,以减少挖拔式木薯收获机的块根拔断损失率。
1 工作原理和控制目标
1.1 工作原理
木薯收获机主要由机架、夹持机构、凸轮抖动机构、平行四杆拔起机构、松土铲和地轮等部分组成,如图1所示。

图1 木薯收获机的结构简图
夹持机构由茎秆导流架、夹子、夹持液压缸等组成,用于夹持木薯茎秆;凸轮抖动机构主要由凸轮轴和直流电机等组成,其抖动部件通过螺栓与夹持机构固定连接,实现夹持机构的上下抖动;平行四杆拔起机构主要由前摇杆、后摇杆、平台、锥齿轮传动系及齿轮齿条摆动液压缸组成,实现夹持机构的升降运动。作业前,需先将木薯茎秆30cm以上部分砍断并移离种植地。作业时,木薯收获机通过三点悬挂装置连接到拖拉机上,随着机器前进,在传感器的感应和控制器的控制下,夹持机构先夹持住木薯茎秆,平行四杆拔起机构将木薯块根向上拔起,同时凸轮抖动机构开始运转,将粘附在木薯块根上的泥土抖掉;木薯块根被拔到一定高度后,夹持机构松开木薯茎秆使木薯块根自由落下;与此同时,平行四杆拔起机构返回初始位置,继续完成下一株木薯块根的收获。木薯收获机按上述作业流程完成木薯块根的收获。
1.2 控制目标
文献[2]以块根拔起作业效率、块根损失率、土薯分离相对不干净度和块根最大拔起力为试验指标,通过动力学仿真试验并采用回归分析、优化技术,研究获得了木薯块根拔起的较优速度模型。在作业条件基本相同时,按较优速度模型拔起木薯块根,能达到提高工作效率、减少收获损失率的目的。块根拔起的较优速度模型为
(1)
式(1)的前半部分为抛物线函数,后半部分为正弦函数。正弦函数部分由固定转速的电机带动凸轮轴抖动夹持机构实现。
抛物线函数部分由齿轮齿条摆动液压缸驱动平行四杆机构实现。文献[3]在物理样机上进行换算,得出了齿轮齿条摆动液压缸的给定转速表达式,如式(2)所示。齿轮齿条摆动液压缸按式(2)转速运行,可使夹持机构在竖直方向上的速度分量按照抛物线函数运行。
(2)
同时,文献[3]给出了木薯块根的拔起速度控制方案,即木薯收获机先按较优速度将木薯块根拔起,当检测到拔起力大于900N时,进行减速调节;在较优拔起速度的基础上将拔起速度降低0.05m/s;经过0.13s,再检测拔起力,若拔起力还大于900N,拔起速度再次降低0.05m/s;两次降速后,如再次检测到拔起力大于900N,不再进行降速调节,避免拔起过程耗时过长,影响下一株木薯块根的收获。这个控制方案在两次降速之间能保持不小于0.13s的时间间隔,保证了两次测力数据的准确性,避免降速过快引起机器不稳定,同时保持较高的收获效率。因此,本文以此作为拔起机构控制目标进行自适应控制研究。
2 自适应控制算法的研究
2.1 模糊PID自适应控制算法
模糊PID控制算法是在PID控制算法基础上加入自适应算法[4],在控制过程中实时调节PID的3个增益参数,达到自适应外界环境的控制效果。模糊PID结构框图如图2所示。结构框图中,虚线框部分为模糊算法过程,包括模糊化、模糊推理、解模糊、知识库等[5]。

图2 模糊PID结构框图
模糊化是模糊算法的最初阶段,对转速偏差及其偏差变化率进行模糊化处理。木薯收获机拔起机构模糊算法的输入量为给定转速与反馈转速的偏差E及其偏差变化率EC,根据偏差与偏差变化率的范围确定输入变量E、EC的量化论域为[-5,5],E和EC的模糊集定义为负大nb、负中nm,负小ns、不变zo、正小ps、正中pm、正大pb这7个模糊集合,即{nb、nm、ns、zo、ps、pm、pb}。为缩短运算时间,中间部分的隶属度函数选择三角函数,两边选择钟型函数。在MatLab的模糊工具箱中定义偏差E的隶属度函数和偏差变化率EC的隶属度函数,分别如图3、图4所示。
输出量为PID控制算法的3个增益参数的增量△Kp、△Ki、△Kd,△Kp的论域为[-25,25],△Ki的论域为[-15,15],△Kd的论域为[-10,10]。输出量△Kp、△Ki、△Kd的模糊集为负大nb、负中nm、负小ns、零zo、正小ps、正中pm、正大pb这7个模糊集合,即{nb、nm、ns、zo、ps、pm、pb}。隶属度函数中间选择三角函数,两边选择钟型函数。在MatLab的模糊工具箱中定义△Kp的隶属度函数、△Ki的隶属度函数和△Kd的隶属度函数,分别如图5~图7所示。

图3 模糊量E的隶属度函数

图4 模糊量EC的隶属度函数

图5 模糊量△Kp的隶属度函数

图6 模糊量△Ki的隶属度函数

图7 模糊量△Kd的隶属度函数
在定义隶属度函数时,有意地将E、EC的隶属度向两边发散,输出量△Kp、△Ki、△Kd的隶属度函数向中间靠拢,以达到既快速又平稳的控制效果。
模糊推理是模糊算法的关键,制定合理的推理规则可实现根据人的思维进行调控。已存在一种普通模糊PID控制算法,其依据PID的3个参数的特性制定模糊规则表,规则表呈现对称形式,规则布局平缓,适用范围广[6]。而木薯收获机拔起机构控制系统存在两个特点:一是木薯收获机液压系统存在时间滞后[7];二是木薯收获机拔起机构拔起控制的给定转速曲线为斜率不断增大的曲线,后期增速剧烈。根据上述特点,对3个增益参数Kp、Ki、Kd按以下原则进行调节。
1)比例作用Kp直接反应偏差大小。给定转速曲线呈现抛物线形式,前段和中段速度平缓,偏差小,此段应以较小的比例作用进行控制,避免震荡。伴随给定转速逐步增加进入后段,给定转速上升越来越快,偏差和偏差变化率同为负数,且绝对值逐渐增大时实际速度跟不上给定速度,且有继续增大趋势;比例作用应呈现类似抛物线形式逐步上升,适应抛物线形式增长的控制要求,保证跟随控制效果。
2)积分作用Ki可以消除静态偏差。在给定转速曲线后段抛物线上升阶段,可以减弱积分作用,避免震荡。
3)微分作用Kd可对偏差趋势进行提前控制。在拔起过程后段,引入合适的微分作用进行提前预测并补偿,同时避免震荡。
以上述原则为依据,根据变化程度的不同制定相应的规则。模糊PID的模糊算法采用以下形式定义规则:
IF {E=Ai and EC=Bi} then △Kp=Pi and △Ki=Ii and △Kd=Di (i=1,2,...,n)
其中的Ai、Bi、Pi、Ii、Di分别是各自论域的模糊语言值(nb,...,pm,pb)。
每个输出制定49条规则,3个输出制定3个模糊控制规则表,△Kp的模糊规则表、△Ki的模糊规则表和△Kd的模糊规则表分别如表1~表3所示。

表1 △Kp模糊规则表

表2 △Ki模糊规则表

表3 △Kd模糊规则表
为保证输出的精准平滑,选择centroid (面积中心法)解模糊化。同时,为后续方便修改调用算法,在MatLab中将模糊PID控制算法保存为mohukonzhiPID.fis文件,并导出到MatLab工作空间,方便Simulink中的Fuzzy Logic Controller子模块调用本模糊算法。
△Kp、△Ki、△Kd与输入量E、EC的关系分别如图8~图10所示。
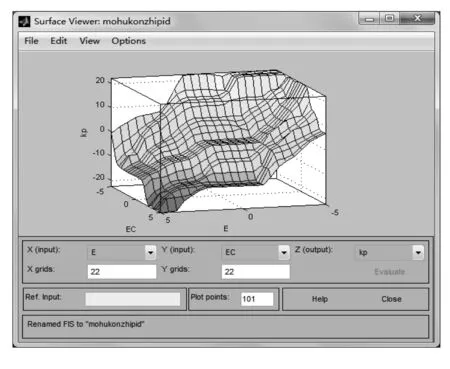
图8 模糊量△Kp
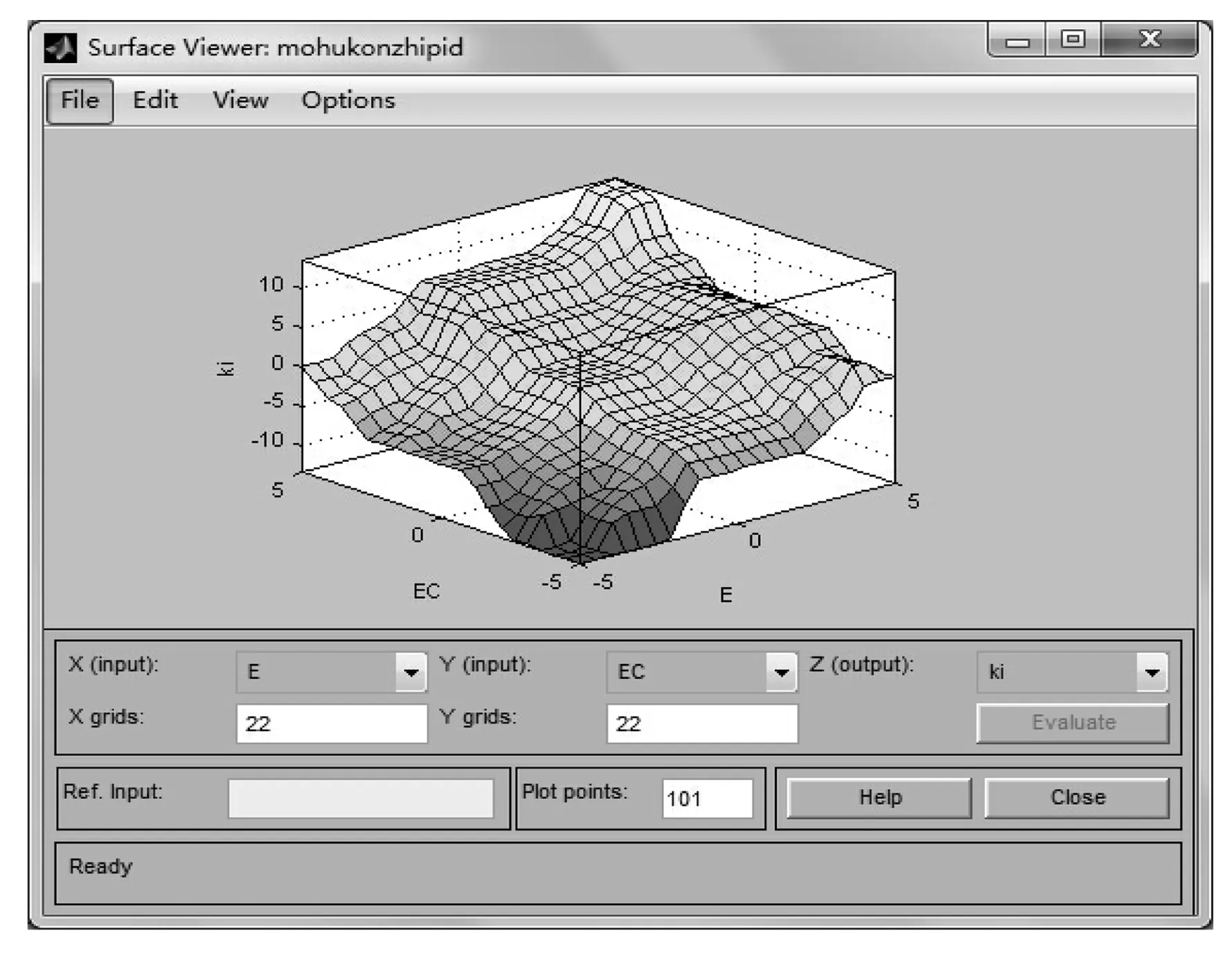
图9 模糊量△Ki

图10 模糊量△Kd
由图8~图10可知:在块根拔起过程的前期和中期,偏差E和偏差变化率EC绝对值较小,△Kp、△Kd、△Ki输出平缓,以适应给定曲线前段和中段的平缓变化,保证跟随的平稳。当偏差E和偏差变化率EC同为负数且绝对值逐渐增大时,△Kp输出类似抛物线形式逐步上升,以适应给定转速曲线的剧烈上升的要求。△Ki输出最小,削弱积分作用,避免震荡。△Kd输出适中,补偿滞后,加快响应。
△Kp、△Ki、△Kd这3个输出量在实际控制过程中根据环境变化而实时变化,3个输出量通过相乘及相加运算,实现模糊算法与PID控制算法的结合。本文使用Simulink搭建完成的模糊PID自适应控制算法框图如图11所示。
图11中使用Switch模块实现给定转速曲线在拔起拉力超过设定值900N时的转换,3条给定转速曲线采用Fcn模块实现。
在上述Simulink搭建的模糊PID自适应控制算法基础上,为了进一步提高控制效果,根据木薯收获机拔起机构控制系统的特点,对模糊PID控制算法作进一步优化。
木薯收获机拔起机构在拔起块根过程的中间阶段,拔起阻力变化大,外力干扰大,因此在此段采用屏蔽微分作用,增强抗干扰性;而模糊规则能一定程度抑制微分作用,但无法完全屏蔽微分作用。为达到在中间阶段完全屏蔽微分作用,通过时间判断屏蔽此段微分作用,提高控制的稳定性。文献[2]的研究表明:在0.36s~0.78s之间,块根拔起阻力变化大。因此,在这一时间范围应进行屏蔽微分作用,两个时间点均为控制周期0.013s的整数倍,方便通过累加控制周期个数获知该时间段。
木薯收获机拔起机构在拔起块根的过程中是根据拔起力的大小对拔起速度进行调节的,而拔起力的变化会引起拔起速度的变化,因此在转速反馈控制的基础上加入拔起力前馈调节,以优化控制算法,提升控制效果。在拔起力小于900N的情况下,当本次测得拔起力与前次测得拔起力相减大于80N,认为拔起力有增大变化趋势,可预测拔起速度将出现降低趋势,采用增强比例作用(为原比例作用的1.5倍)的调节方法,实现对速度降低趋势的提前预测调节。当本次测得拔起力与前次测得拔起力相减小于-70N时,则认为拔起力有减小变化趋势,可预测拔起速度将出现增强趋势,削弱比例作用(为原比例作用0.7倍),实现对速度增加趋势的提前预测调节。模糊PID控制算法结合拔起力前馈调节能实现更好的跟随控制效果。
本文采用Stateflow逻辑模块实现在时间0.36~0.78s之间时屏蔽微分作用和判断拔起力增大或减小变化趋势,进而调节比例作用。使用Simulink搭建优化后的模糊PID控制算法框图如图12所示。
为提高控制代码的效率,应对控制算法进行整型化处理,并将位置式PID算法改进成为增量式PID算法。用Simulink搭建的经过整型化处理和运算结构优化后的增量式模糊PID自适应控制算法框图如图13所示。
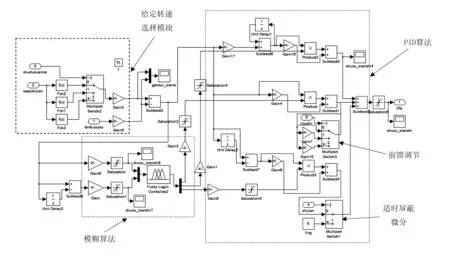
图12 优化后模糊PID控制算法框图

图13 增量式模糊PID控制算法Simulink框图
2.2 模糊PID自适应控制算法的性能分析
本文采用联合仿真的方法研究木薯收获机的控制算法,通过对比分析研究不同控制算法的控制效果。仿真试验直接利用文献[8]建立的木薯收获机机电液联合仿真模型进行,3种算法的试验条件均为空载。图14为普通离散PID获得的控制效果图,图15为利用文献[6]所述普通模糊PID获得的控制效果图,图16为优化后的模糊PID控制算法获得的控制效果图。其中,虚线是联合仿真得出的摆动液压缸的转速曲线,实线是摆动液压缸的给定转速曲线。
表4为各控制算法的性能对比表。

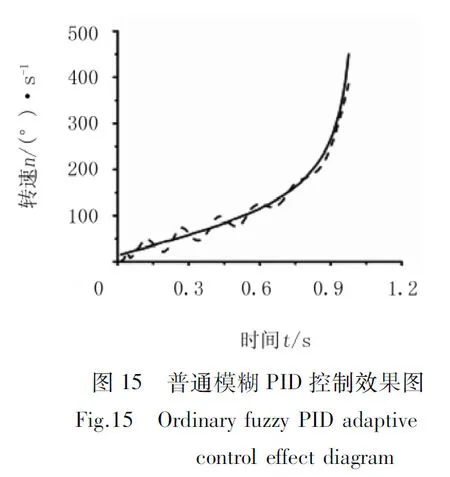


表4 控制算法性能对比表
由图14~图16和表4可知:普通离散PID控制算法、普通模糊PID控制算法与优化后的模糊PID控制算法的1个工作周期的耗时均小于3.1s。普通离散PID控制算法整体控制效果最差,在拔起控制过程的前段和中段存在一定程度的震荡,且短时间内无法实现收敛,自适应效果不理想;拔起过程后段控制效果比优化后的模糊PID算法控制效果差,误差绝对值积分IAE指标较大,整体效果不理想。优化后的模糊PID控制算法控制平稳,误差绝对值积分IAE指标较小,拔起过程前端和中段存在轻微抖动;但整体跟随效果平稳,无明显超调。对比普通模糊PID的控制效果可知:根据木薯收获机控制系统特点制定的模糊规则起到了理想的自适应调节效果,采用适时屏蔽微分作用,提高了抗干扰性;拔起力前馈调节,可根据拔起力变化提前判断转速趋势并引入修正比例作用,使控制过程平稳,整个拔起过程平均相对误差在1.26%,控制精度较高。因此,本文选择优化后的模糊PID控制算法对木薯收获机物理样机进行控制。
3 物理样机控制效果分析
3.1 拔起过程转速控制效果
为了检验优化后的模糊PID控制算法对各种载荷条件的适应性,物理样机试验时,给木薯收获机夹持机构从轻到重添加砝码,分别检验空载、固定加载300N、固定加载640N和突然加载、突然卸载、交变载荷的拔起控制效果,以模拟木薯收获机在田间试验时拔起不同阻力的木薯块根。另外,为了排除不确定性因素的影响,每个条件下的试验重复10次,取平均直进行计算。
图17为空载试验的控制效果图,图18为固定加载300N砝码载荷的控制效果图,图19为固定加载640N砝码载荷的控制效果图,图20为在0.52s时载荷突然从200N卸载到空载的控制效果图,图21为在0.13s时载荷突然从空载加载到300N的控制效果图,图22为在0.26s时载荷突然从空载加载到200N、在0.52s时突然卸载到空载的控制效果图。其中,虚线是物理样机中摆动液压缸的实际转速曲线,实线是摆动液压缸给定的转速曲线。不同载荷条件下控制算法的各项性能指标如表5所示。
由图17~图22和表5可知:不同载荷情况下,优化后的模糊PID控制算法的拔起过程启动阶段响应速度快,最长响应时间为0.065s,且无明显超调;中间阶段无明显的震荡现象,在变载荷后,虽然存在一定的偏移,但能较快恢复跟随,表明适时屏蔽微分作用起到了较好的抗干扰作用,同时加入拔起力前馈调节,通过拔起力的变化提前预测转速变化趋势,引入系数修正比例作用,使中段控制过程平稳;拔起过程后段,轻载荷跟随效果好,重载荷跟随效果存在一定滞后,但保持了较好的跟随。分析表明:优化后的模糊PID控制算法在总体上能较好地跟随给定转速曲线,平均相对误差最大为4.54%,控制精度较高。

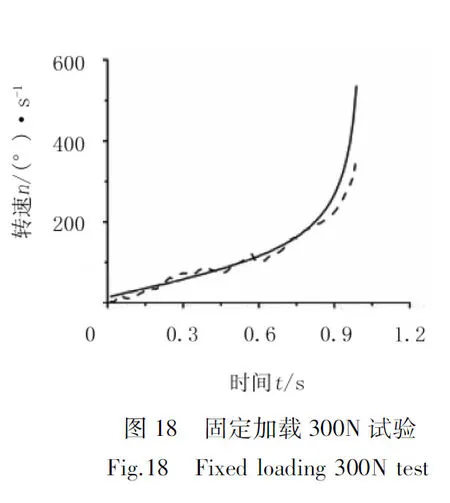

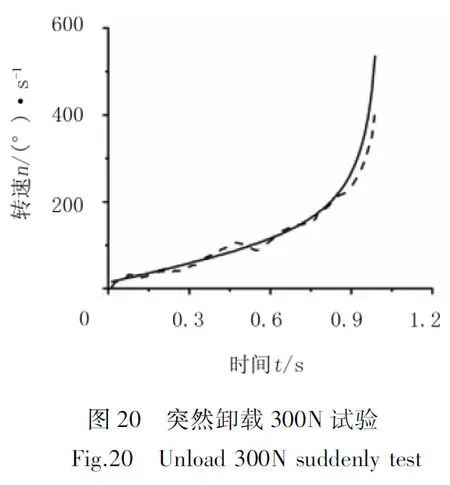
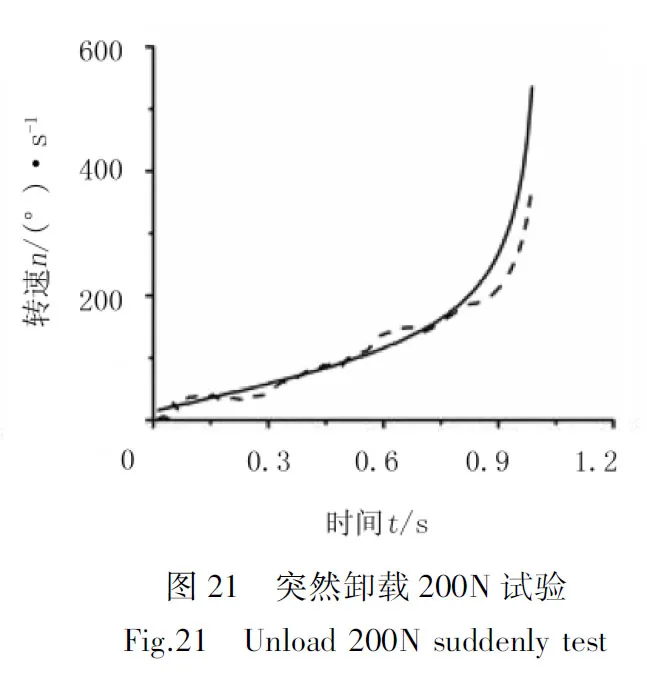


表5 不同载荷下控制算法的各项性能指标
3.2 整机收获作业的控制效果
整机收获作业包括拔起机构的拔起过程和下降过程,试验中使用的砝码重量为300N。在拔起机构拔起块根过程,按块根较优拔起速度模型进行控制。其中,较优拔起速度模型中的正弦曲线部分由固定转速的减速电机带动凸轮轴使夹持机构抖动实现(电机额定转速为3 600r/min,减速比10:1),抛物线部分由齿轮齿条摆动液压缸按照给定转速曲线运行实现。在拔起机构的下降过程,采取二级调速处理,先高速下降,后中速下降,最后在重力作用下自然下降,达到快速下降回位、加快作业周期及提高作业效率的目的。试验时,先测定拔起机构的垂直加速度,后通过MatLab离散积分处理获得垂直拔起速度,试验重复10次。
图23为优化后模糊PID控制算法的整机自动控制过程速度图(包括拔起过程和下降过程)。其中,实线为木薯块根收获机物理样机的拔起过程速度曲线,虚线是木薯块根收获机联合仿真的拔起过程速度曲线。由图23可知:实测的速度曲线和与联合仿真的速度曲线基本一致。虽然由于物理电机启动存在一定的滞后,在0.12s抖动过程存在滞后,但后期的抖动、提升拔起过程保持较好的跟随,说明物理样机在优化后模糊PID控制算法的控制下能按照较优拔起速度曲线运行,控制过程连续平稳。同时,实测下降过程的速度和仿真下降过程速度趋势一致,表明利用的联合仿真模型精度较高,仿真可信度较高。另外,10次重复试验的结果显示:10次试验的速度跟随最长响应时间为0.092s,最大绝对偏差量0.780 6m/s,一个工作周期平均相对误差4.93%,表明优化后的模糊PID控制算法的控制精度较高;且10次重复试验的结果差异性小,拔起过程稳定,表明即使存在液压粘温特性引起压力油流速变化和抖动机构不断抖动产生外加干扰力等不确定因素的影响,增量式模糊PID自适应控制算法仍能起到较好的自适应控制效果。
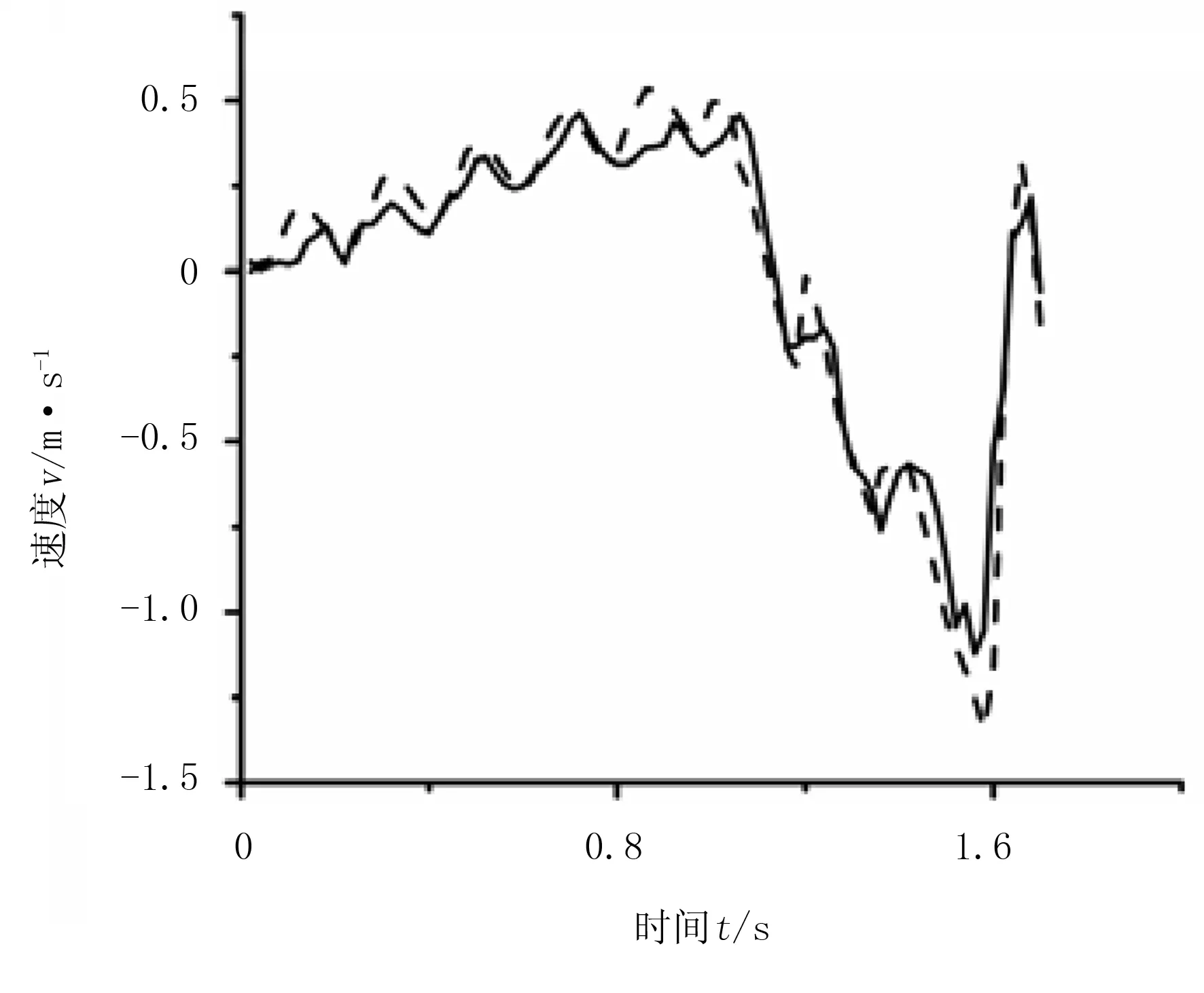
图23 物理样机速度曲线与仿真速度曲线对比图
4 结论
采用联合仿真技术,以较优块根拔起速度模型为
基础,根据拔起力变化,控制木薯收获机拔起速度使其达到减少块根拔断损失率的目的。对木薯块根拔起过程进行模糊PID自适应控制,且对模糊PID自适应控制算法进行了优化及物理试验验证,结果表明:优化的模糊PID自适应控制算法能使齿轮齿条摆动液压缸在拔起过程很好地跟踪给定转速曲线,在固定载荷或变化载荷情况下,拔起一棵木薯所用的时间小于2.3s,平均相对误差均小于5%,控制精度较高,且控制拔起过程中能较好地跟随给定转速曲线式,拔起控制过程平稳,无明显震荡现象,可有效实现在木薯块根生长情况和土质情况变化引起拔起阻力变化大的条件下对木薯块根拔起过程进行高精度控制,减少挖拔式的木薯收获机的块根拔断损失率。
[1] 杨望,杨坚,郑晓婷,等.木薯收获机械与技术研究现状及发展趋势[J].农机化研究,2012,34(12):230-235.
[2] 李娟娟.木薯收获机拔起速度模型的优化研究[D].南宁:广西大学,2013.
[3] 郑贤.木薯收获机的机电液一体化联合仿真研究[D].南宁:广西大学,2014.
[4] 柳长安,李为吉,王和平.基于蚁群算法的无人机航路规划[J].空军工程大学学报,2004,2(5):9-12.
[5] 罗文军.基于参数自整定的模糊PID控制在水箱控制系统中的应用[D].长沙:中南大学,2011.
[6] 刘金琨.先进PID控制MATLAB仿真:2版[M].北京:电子工业出版社,2004:7.
[7] 孙孟辉,王益群,王慧,等.冷带轧机液压AGC系统的时滞控制研究[J].液压与气动,2014(10):67-69.
[8] 杨望,郑贤,陈科余,等.木薯块根收获机机电液联合仿真模型[J].农机化研究,2016,38(7):100-105.
Fuzzy PID Adaptive Control Algorithm of Pulling-up Mechanism on the Cassava Harvester
Zheng Xian, Chen Keyu, Yang Wang, Yang Jian, Li Yang
(College of Mechanical Engineering, Guangxi University, Nanning 530004, China)
The pulling-up cassava harvester can’t pulling up the cassava root accurately according to the variation of cassava growth condition and soil condition,and its root pulling off loss rate is very high when the cassava growth condition and soil condition have a big change.To solve the problem,this paper adopts the co_simulation technology and uses fuzzy PID adaptive control algorithm which based on the optimal velocity to control the cassava root lifting velocity according to the pulling force change,and regards reducing root pulling off loss rate as a goal,it shows that the optimizational fuzzy PID adaptive control algorithm can make the speed of gear rack swing hydraulic cylinder track the given speed curve very well,and the whole machine is very well in the self-adaption and it can adapt to different working load.
cassava harvester; pulling-up mechanism; adaptive control algorithm; optimization
2016-03-23
国家自然科学基金项目(51365005,51065003);广西制造系统与制造技术重点实验室项目(13-051-09S01)
郑 贤(1987-),男,广西博白人,硕士,(E-mail) zhxian.2007@163.com。
杨 望(1984-),男,广西合浦人,副教授,硕士生导师,博士,(E-mail)yanghope@163.com。
S225.7+1
A
1003-188X(2017)04-0012-09
猜你喜欢
作物学报(2022年8期)2022-05-29
中国农村科技(2021年12期)2021-12-28
———2020 款中农博远玉米收获机值得期待
河北农机(2020年1期)2020-01-11
河北农机(2020年2期)2020-01-08
中成药(2018年2期)2018-05-09
现代园艺(2017年22期)2018-01-19
现代园艺(2017年19期)2018-01-19
世界热带农业信息(2018年11期)2018-01-17
广东第二课堂·小学(2017年5期)2017-05-27
浙江大学学报(工学版)(2016年9期)2016-06-05
