
基于无差拍预测控制和扰动观测器的永磁同步电机电流控制*
2017-11-07 01:52刘旭东
电机与控制应用 2017年10期
孙 静, 刘旭东
(1. 山东工商学院 信息与电子工程学院,山东 烟台 264005;2. 青岛大学自动化与电气工程学院,山东 青岛 266071)
基于无差拍预测控制和扰动观测器的永磁同步电机电流控制*
孙 静1, 刘旭东2
(1. 山东工商学院 信息与电子工程学院,山东 烟台 264005;2. 青岛大学自动化与电气工程学院,山东 青岛 266071)
永磁同步电机(PMSM)转速或转矩驱动系统都要求具有良好的电流控制性能,因此对电流环的控制至关重要。为了提高电流的动态性能和鲁棒性,基于无差拍预测控制和扰动观测器提出了一种新的PMSM电流控制方法。利用预测控制动态性能好,易于数字实现等优点,基于无差拍原理设计了预测电流控制器,但该方法对电机模型及参数依赖较大。针对实际应用中由于建模误差及参数变化等产生的扰动,设计了一种简单的扰动观测器,并用于电流环的前馈补偿控制,有效地提高了系统的鲁棒性。基于dSPACE平台完成了试验验证。试验结果表明:所提出的电流控制方法能实现电流的快速跟踪控制,而且具有较强的鲁棒性。
永磁同步电机;电流控制;无差拍预测控制;扰动观测器
0 引 言
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)具有效率高、功率密度大、可靠性高等优势, 在电动汽车、风力发电等领域得到了广泛应用[1]。由于PMSM具有多变量、强耦合、非线性等特性,在转速或转矩驱动系统中,通常采用按转子磁场定向的矢量控制方案。在转速控制系统中,采用转速环和电流环级联的控制方式,外环为转速环,内环为电流环,进而分别设计转速和电流控制器;在转矩控制中,采用电流单环控制,通过调节电流,实现电机的转矩控制。因此,在PMSM驱动系统中,为了实现高性能的电机控制,对电流环的控制至关重要。随着现代控制理论的发展,一些先进的控制方法,如:内模控制[2]、滑模控制[3]、自抗扰控制[4]、自适应控制[5]等,被应用到PMSM电流控制中,并取得了许多研究成果。
近年来,随着半导体变流技术和计算机技术的发展,预测控制作为一种新的控制策略,已被逐步应用到了交流电机控制中,并最有可能成为继PI控制之后电力电子和交流电机控制领域的替代方案[6]。预测控制的共同思想是利用系统的输入输出数据,通过计算预报受控变量的未来值,并使用一个最优准则来选择控制量。根据控制方法的不同,PMSM的预测控制可分为滞后控制[7]、轨迹控制[8]、无差拍预测控制[9]、模型预测控制[10]等。其中,无差拍预测控制因具有动态性能好,方法简单,易于数字实现等优点,已在PMSM电流控制中取得了大量的研究成果。
但是,无差拍预测控制是一类依赖电机模型的控制方法,而且该方法不能直接处理系统扰动的影响。当系统存在模型严重失配或参数变化时,控制精度会显著降低。在PMSM驱动系统中,受电机运行工况和温度等影响,电机不可避免地存在扰动、参数变化等。为了提高PMSM预测电流控制的鲁棒性,文献[11-12]提出了基于改进无差拍控制的PMSM电流预测控制方法;文献[13]在无差拍预测控制器中,通过参数辨识方法,实时估计电机参数,进而抑制参数变化对电流控制性能的影响,但该方法易受参数估计精度的影响;文献[14-15]在PMSM 基于无差拍预测控制的基础上,设计了扰动观测器,并用于电流环的前馈补偿控制。该方法能消除系统因建模和参数误差等产生的所有扰动,有效地提高系统鲁棒性。
为此,本文基于无差拍预测控制和一种简单扰动观测器,研究了PMSM的电流控制方法。该方法可有效结合预测控制动态性能好和扰动观测器鲁棒性强的优点,并通过仿真和试验证明了该方法的有效性,且控制器设计简单,参数容易调节。
1 PMSM数学模型
按转子磁场定向理论,PMSM在dq同步旋转坐标系下的数学模型可表示为
其中:
式中:Ld、Lq——d、q同步旋转坐标系下的定子电感;
id、iq、ud、uq——d、q坐标系下的定子电流和电压;
Rs——定子电阻;
p——极对数;
ω——转子机械角速度;
Φ——永磁体产生的磁链;
fd、fq——由参数变化引起的扰动量;
Rst、Ldt、Lqt,Φt——电机在实际运行时的参数值。
2 电流预测控制器设计
本文的控制目标是设计PMSM电流控制器,通过调节定子电压,实现电流的快速跟踪控制,同时系统对建模模型和参数变化等扰动具有较强的抑制能力。为此结合无差拍预测控制和一种简单的扰动观测器控制方法,设计了PMSM鲁棒电流控制器。
本文研究的PMSM控制系统结构框图如图1所示。采用转速和电流级联的控制结构,完成了PMSM转速控制系统的设计。其中,转速环采用PI控制,电流环采用本文提出的电流控制方法,另外控制器中还包括PWM模块、坐标变换等。
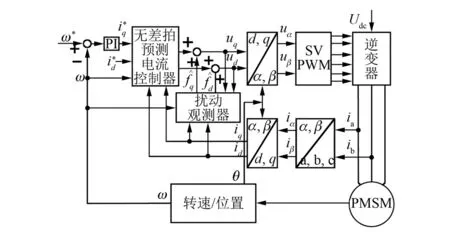
图1 PMSM控制系统结构框图
首先,根据PMSM模型,令
进而可得
将式(5)表示为状态空间模型的形式得
取采样时间为T,将式(6)离散化得

由式(4)和式(9)可得PMSM的电流控制器,实现电流的跟踪控制,而且控制器中只含有控制参数T。但从控制器中看出,扰动量fd和fq包含在控制器中,而PMSM不可避免地存在参数变化和模型不确定性,这些都会影响电机的性能。因此,为了设计完整的电机控制器,提高系统的鲁棒性,需得到扰动量f的值。
3 扰动观测器设计
为了提高系统的鲁棒性,本文在无差拍预测控制的基础上设计了一种简单的扰动观测器[3],然后将估计的扰动用于电流环的前馈补偿控制。
首先定义电流跟踪误差:


将估计的扰动量式(11)代入式(9),即可求得最终的电流控制器。该控制器结合了无差拍预测控制和扰动观测器的优点,能实现电流的快速跟踪控制且对系统扰动等具有较强的鲁棒性。
4 试验结果与分析
为了验证所提PMSM电流控制方法的有效性,基于dSPACE控制器,在电机转速控制系统试验平台上完成了试验验证。dSPACE控制系统是由德国dSPACE公司设计开发的一块基于MATLAB/Simulink的控制系统开发及性能测试的平台。在控制器中,转速环采用PI控制,电流环采用本文提出的基于扰动观测器的无差拍预测控制方法。PMSM参数如下:额定转矩2.3 N·m,额定转速为3 000 r/min,极对数为3,定子电阻为4.8 Ω,d轴定子电感为0.019 5 H,q轴定子电感为0.027 5 H,永磁体磁通为0.15 Wb。
首先,给定电机参考转速为1 000 r/min,负载转矩为0.5 N·m。图2为电机的dq轴电流和转速响应曲线。从图2中可看出,电机起动后,电流迅速增大,产生较大的起动电流,同时电机开始转动,最后电机稳定运行在参考转速。在此过程中,电机输出电流能快速地跟踪参考电流值,所设计的控制器具有良好的转速和电流跟踪性能。

图2 电机起动时的试验结果
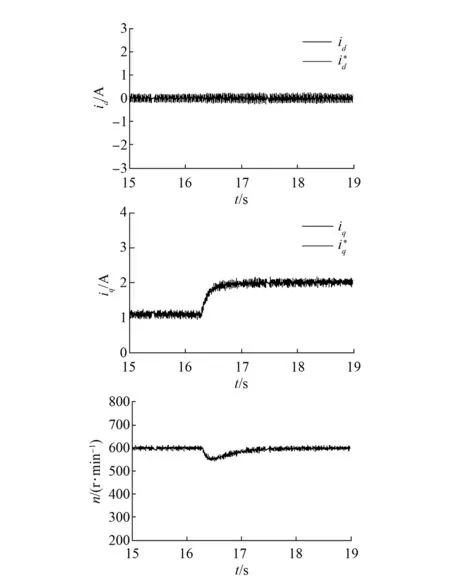
图3 负载转矩变化时的试验结果
为了验证参考电流变化时的电流跟踪性能,当电机稳定后,电机负载转矩变为1 N·m。图3为对应的电流和转速变化曲线。图4为电机给定转速由600 r/min变为1 200 r/min时的电机响应曲线。从图3中看出,电机转速和电流变化后,q轴参考电流增大,电机输出q轴电流能快速的跟随参考电流的变化,d轴电流有一个小的波动,但很快恢复到零。与此同时,电机仍具有较好的转速控制性能。

图4 电机参考转速变化时的试验结果
为了验证系统存在参数扰动时的鲁棒性,完成了控制器参数和电机实际参数不一致时的电机控制试验。首先,将控制器中定子电阻、电感、转子磁链等参数分别变为额定值的50%、75%、120%,给定电机转速为1 000 r/min,负载转矩为0.5 N·m,图5为对应的试验结果。从图5可看出,当电机参数和控制器参数不一致时,系统仍具有良好的电流控制性能,所设计的控制器能快速适应参数的变化,对电机扰动具有较强的鲁棒性。
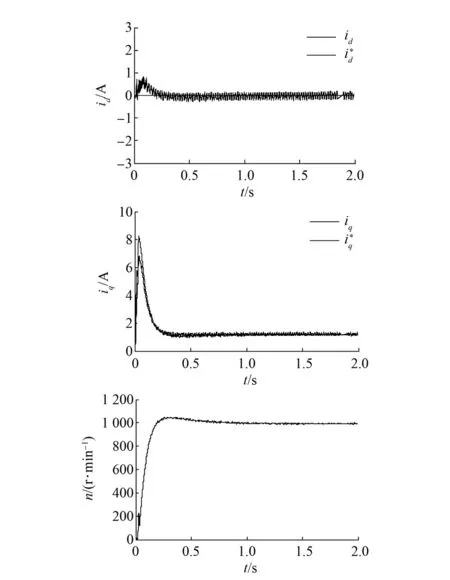
图5 电机参数变化时的试验结果
5 结 语
本文提出了一种新的PMSM电流跟踪控制方法,将无差拍预测控制理论和扰动观测器用于PMSM的电流控制,该控制器不仅具有良好的电流控制性能,而且对系统参数变化等扰动具有较强的鲁棒性。最后搭建了PMSM转速控制系统试验平台,完成了电机起动、负载转矩变化、给定转速变化及系统参数变化时的试验,验证了该方法的有效性。
[1] EHASAN I M, GAO Y M, EMADI A.现代电动汽车、混合动力电动汽车和燃料电池车——基本原理、理论和设计[M].倪光正,倪培宏,熊素铭,译.北京:机械工业出版社,2012.
[2] 周华伟,温旭辉,赵峰,等.基于内模的永磁同步电机滑模电流解耦控制[J].中国电机工程学报,2012,32(15): 91-99.
[3] CHANG S H, CHEN P Y, TING Y H, et al. Robust current control-based sliding mode control with simple uncertainties estimation in permanent magnet synchronous Motor drive Systems[J]. IET Electric Power Applications,2010,4(6): 441-450.
[4] LI S H, XIA C J, ZHOU X. Disturbance rejection control method for permanent magnet synchronous motor speed-regulation system[J]. Mechatronics,2012(22): 706-714.
[5] KIM K H. Model reference adaptivecontrol-based adaptive current control scheme of a PM synchronous motor with an improved servo performance[J].IET Electric Power Applications,2009,3(1): 8-18.
[6] RODRIGUEZ G, CORTES P.功率变换器和电气传动的预测控制[M].陈一民,周京华,卫三民,译.北京:机械工业出版社,2015.
[7] BOLOGNANI S, ZIGLIOTTO M. Full-digital predictive hysteresis current control for switching losses minimisation in PMSM drives[C]∥ International Conference on Power Electronics, Machines and Drives, 2002: 61-67.
[8] ROESMAN T, SOTER S. Mechanically com-mutated self control of PM-synchronous machines[C]∥ IEEE Energy Conversion Congress and Exposition (ECCE),2011: 1555-1559.
[9] TURKER T, BUYUKKELES U, BAKAN A. A robust predictive current controller for PMSM drives[J].IEEE Transactions on Industrial Electronics,2016,63(6): 3906-3914.
[10] ERROUISSI R, OUHROUCHE M, CHEN W H. Robust cascaded nonlinear predictive control of a permanent magnet synchronous motor with antiwindup compensator[J]. IEEE Trans on Industrial Electronics,2012,59(8): 3078-3088.
[11] 牛里,杨明,刘可述.永磁同步电机电流预测控制算法[J].中国电机工程学报,2012,32(6): 131-137.
[12] 王宏佳,徐殿国,杨明.永磁同步电机改进无差拍电流预测控制[J].电工技术学报,2011,26(6): 39-45.
[13] WANG W, XIAO X, DING Y. An adaptive incremental predictive current control method of PMSM[C]∥ Proceedings of the Conference on Transportation Electrification Asia-Pacific, IEEE,2014: 1-6.
[14] KIM K H, BAIK I C, MOON G W. A current control for a permanent magnet synchronous motor with a simple disturbance estimation scheme[J]. IEEE Trans on Control Systems Technology, 1999, 7(5): 630-633.
[15] 易伯瑜,康龙云,冯自成,等.基于扰动观测器的永磁同步电机预测电流控制[J].电工技术学报,2016,31(18): 37-45.
DeadbeatPredictiveCurrentControlofPermanentMagnetSynchronousMotorBasedonDisturbanceObserver*
SUNJing1,LIUXudong2
(1. School of Information and Electronic Engineering, Shandong Technology and Business University,Yantai 264005, China;2. College of Automation and Electrical Engineering, Qingdao University, Qingdao 266071, China)
The favourable current control was required in speed or torque drive system of permanent magnet synchronous motor, so it’s very important for the control of the current loop. In order to improve the transient performance and the robustness, a novel current control method based on deadbeat predictive control and disturbance observer was proposed. By using the good transient response and easy digital realization of predictive control, the current controller was designed based on deadbeat theory, which was greatly dependent on the motor model and the parameters. According to the disturbance caused by the modeling error and parameter variations, a simple disturbance observer was designed, which was used for the feed-forward compensation control. The robustness was enhanced effectively. The experiment was complemented on dSPACE, and the results showed that the proposed current control method had good current tracking and strong robust performance in various conditions.
permanentmagnetsynchronousmotor(PMSM);currentcontrol;deadbeatpredictivecontrol;disturbanceobserver
国家自然科学基金项目(61403236,61703222);山东工商学院博士启动基金项目(BS201511)
孙 静(1979—),女,博士研究生,讲师,研究方向为电动汽车驱动系统控制、数据驱动预测控制等。
刘旭东(1987—) ,男,博士研究生,研究方向为电动汽车驱动系统控制、非线性控制等。
TM 351
A
1673-6540(2017)10- 0025- 05
2017 -03 -06
猜你喜欢
电机与控制应用(2022年4期)2022-06-27
电机与控制应用(2022年4期)2022-06-27
农业机械学报(2020年2期)2020-03-09
中华建设(2019年7期)2019-08-27
项目管理技术(2016年12期)2016-06-15
西南交通大学学报(2016年6期)2016-05-04
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07
电测与仪表(2015年21期)2015-04-09
电测与仪表(2015年19期)2015-04-09
