
Luenberger观测器在永磁同步电机无传感器控制中的应用研究*
2017-11-07 01:52周双飞黄海波
电机与控制应用 2017年10期
周双飞, 黄海波, 简 炜
(湖北汽车工业学院 电气与信息工程学院,湖北 十堰 442002)
Luenberger观测器在永磁同步电机无传感器控制中的应用研究*
周双飞, 黄海波, 简 炜
(湖北汽车工业学院 电气与信息工程学院,湖北 十堰 442002)
在永磁同步电机(PMSM)矢量控制中,根据Luenberger观测器原理,提出了一种基于Luenberger观测器的PMSM转子速度和位置的估算方法,有效解决了PMSM由于机械传感器安装带来的一些弊端。利用MATLAB/Simulink工具搭建控制系统仿真模型并进行仿真验证,仿真结果表明控制系统具有良好的控制性能。最后,在以STM32F103ZET6为控制核心的硬件系统上进行算法的实现,试验结果表明基于Luenberger观测器的PMSM控制系统具有较高的控制精度且稳定性较好。
永磁同步电机;无速度传感器;Luenberger观测器
0 引 言
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)具有高动态性能、高功率密度、轻量化等特点,随着电力电子技术和微处理器技术的发展,PMSM得到广泛的应用。目前PMSM的控制方法主要包括矢量控制和直接转矩控制。矢量控制是通过将电机的定子电流从三相静止坐标系变换到以转子磁链定向的同步旋转坐标系,实现励磁电流和转矩电流的解耦,获得与直流电机一样的动态调速性能;直接转矩控制通过空间矢量的分析方法,在定子坐标系下直接实现磁链计算与转矩控制,但其有着磁链和转矩脉动问题[1],故通常情况下选择矢量控制来实现PMSM的控制。
PMSM控制系统,需要得到精确的转子位置和电机转速,来实现较高的控制特性。目前,主要通过在转子上安装机械式的传感器获取其信号,传感器的安装会增加电机控制系统的成本,降低稳定性,还使其在振动、潮湿等恶劣环境下的应用受到限制[2]。因此利用容易获得的电机物理量来计算电机的转子位置和转速,取代机械传感器的无传感器算法得到广泛关注。
目前PMSM无位置传感器矢量控制方法主要有滑模观测器、Luenberger观测器[3-4]、扩展卡尔曼滤波器等。扩展卡尔曼滤波器对噪声有滤波作用,且有良好的抗干扰能力,但该算法复杂,对硬件性能要求较高[5],而滑模观测器存在抖振问题[6],因此为解决以上问题,采用基于Luenberger观测器的PMSM无传感器矢量控制算法,在Simulink中搭建仿真模型,验证该算法的优越性,并设计硬件系统进行验证。
1 PMSM无传感器控制系统
基于Luenberger观测器的PMSM无位置传感器矢量控制系统的框图如图1所示。采用容易测量的电压和电流来估计得到电机的反电动势eα、eβ,利用转子位置和转速与反电动势的关系,可计算得到双闭环控制系统电流内环所需要的转子位置信息θ和速度外环反馈信息ωr。控制系统采用3个PI调节器和电压SVPWM技术来控制电机的运行。

图1 无传感器控制系统整体框图
2 Luenberger观测器设计
PMSM Luenberger观测器基本结构如图2所示。采用PMSM容易测量的电压uα、uβ和电流iα、iβ作为输入,对其进行状态重构,采用估计电流与实际电流的偏差对估计状态不断修正的方法[7],使估计值接近真实值。

图2 Luenberger观测器结构图
在静止αβ坐标系下的电机状态方程为
式中:Rs、Ls——电机定子相电阻和相电感;
iα、iβ,uα、uβ——定子两相静止坐标系定子绕组电流和电压;
λr——转子永磁体磁链;
ωr——转子速度;
p——电机的极对数。
设
根据电机状态方程建立αβ坐标系下的数学模型:
选取状态变量x=[iαiβeαeβ]T,控制变量u=[uαuβ]T,输出变量y=[eαeβ]T。在数字控制系统中,由于采样时间很短,可将单个采样周期内的机械转速ωr变化量视为零,则
建立Luenberger观测器:
为了简化极点的配置,设

转子转速和位置信息可从PMSM反电动势的分量eα、eβ计算得到:


3 系统仿真模型的搭建及分析
为了验证该控制系统的性能,在MATLAB/Simulink平台搭建基于Luenberger观测器的无速度传感器矢量控制系统的仿真模型,如图3所示。其中:PMSM采用42JSF330AS-1000型号的伺服电机,供电电压24 V,额定功率32 W,额定转速3 000 r/min,相电阻2.1 Ω,相电感Ld=Lq=1.4 mH,反电动势系数Ke=4.29 V/krpm,极对数为4。
为构建数字化的滤波器,需要对Luenberger观测器进行离散化,设采样时间Ts=1e-6,则离散化的观测器为
其仿真结构图如图4所示。k1和k2为观测器增益,其值的选择直接关系到观测器性能的优劣。k1、k2可通过计算观测器特征值的方法得到其值的大小,由于计算比较复杂,在此选择在传感器模式下启用观测器,试凑得到k1、k2的初值,再切换到观测器模式下进行微调,由此得到k1=-9 000,k2=80 000。
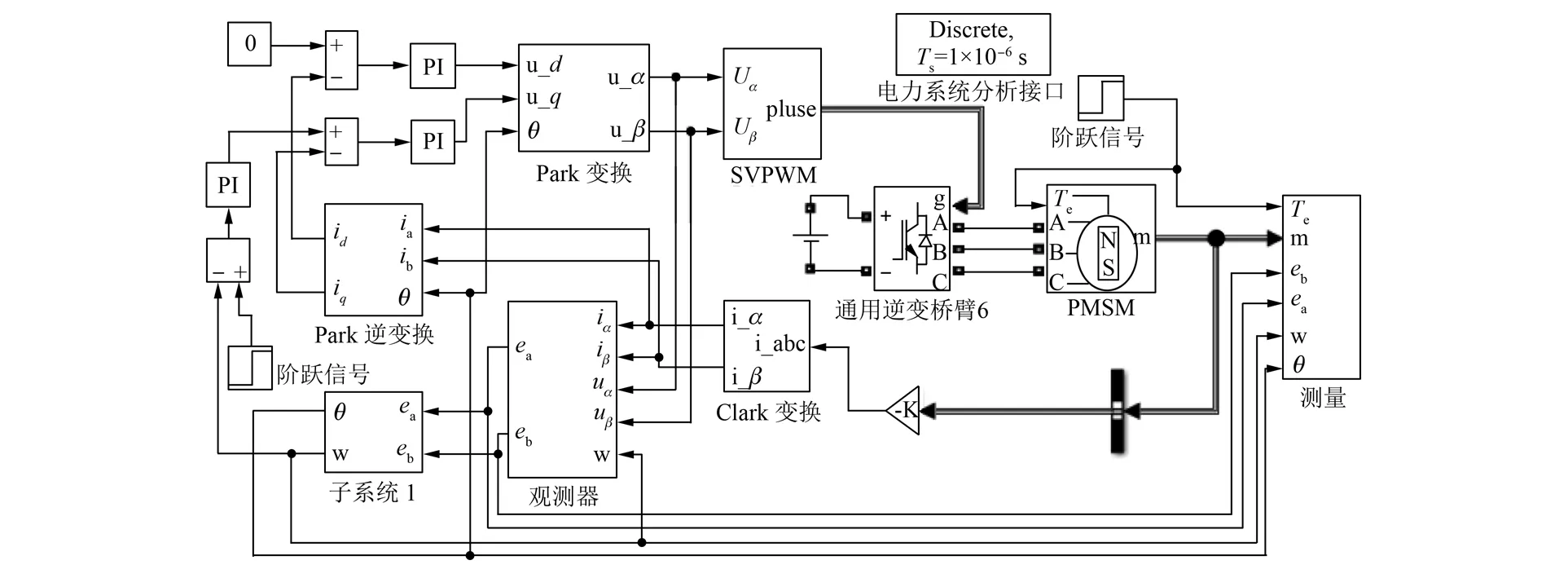
图3 基于Luenberger观测器的PMSM控制系统仿真模型

图4 Observer模块内部结构图
设电机的目标转速为2 000 r/min,对系统进行仿真,反电动势估计曲线如图5所示。反电动势曲线呈现非常好的正弦波形,且PMSM起动过程中波动较小,为电机转子位置和转速的准确估计奠定良好的基础。图6为转子位置响应曲线,约0.01 s后估计的转子位置曲线与实际位置曲线几乎重合,跟踪效果较好。图7为速度响应曲线,可以看出电机起动过程用时约0.04 s,且起动过程比较平稳,转速稳定后估计转速与实际转速误差几乎为零,控制效果比较理想。
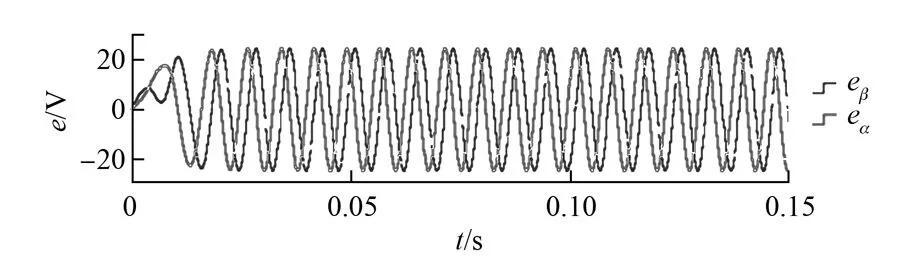
图5 反电动势估计曲线

图6 转子位置响应曲线

图7 速度响应曲线
4 系统实现
利用前面的理论和仿真结论,实现PMSM无传感器矢量控制系统,硬件部分采用低功耗、高性能的STM32F103ZET6为控制芯片设计控制系统,电机采用与仿真同型号的PMSM,软件部分采用C语言编程实现系统的控制。
做与仿真相同的试验,目标转速设为2 000 r/min,通过DAC功能输出电机转速ωr及反电动势分量eα、eβ,并设计简单的RC低通滤波器输出波形。图8为电机的反电动势波形图,输出波形比较好且比较稳定;图9为电机的输出转速波形图,波形1为输出的电机实际转速,通过encode编码器测量得到,波形2为输出的观测器观测的电机转速,可以看出电机进入稳态后,观测转速有小幅度的波动,实际转速比较稳定,控制系统整体效果较好。
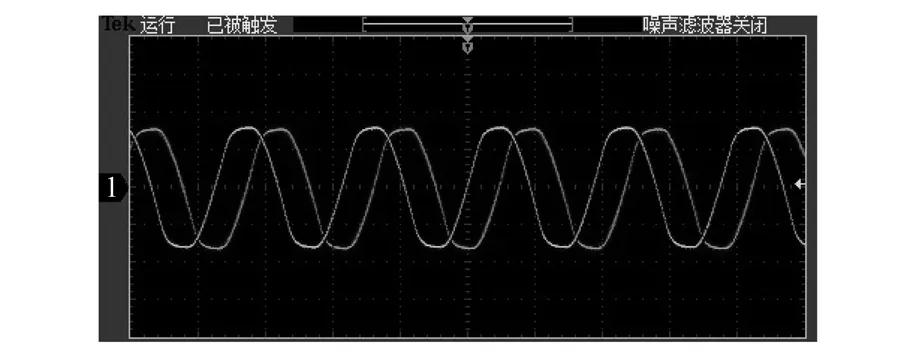
图8 反电动势波形图
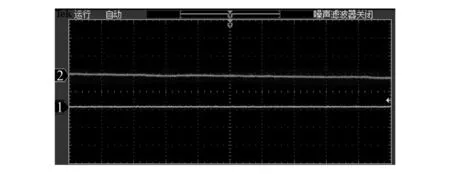
图9 输出转速波形图
5 结 语
本文通过设计Luenberger观测器,估计得到PMSM的转子转速和位置信息,有效解决了传统传感器的一些弊端,且该算法简单,容易实现。仿真和试验结果表明基于Luenberger观测器的PMSM矢量控制系统具有较好的控制精度,且响应速度非常快,系统稳定性较好。
[1] 杨国良,李建雄.永磁同步电机控制技术[M].北京:知识产权出版社,2015.
[2] BOUSSAK M, JARRAY K. A high performance sensorless indirect stator flux orientation control of induction motor drive[J].IEEE Transactions on Industrial Electronics,2006,53(1): 41.
[3] SBITAL B H M. An MRAS-based full order Luenberger observer for sensorless DRFOC of induction motors[J].ICGST-ACSE Journal,2007,7(1):11-20.
[4] 任向杰,陈冰.Luenberger速度观测器在同步运动控制中的应用[J].机械与电子,2011(12): 10-13.
[5] 陈殷.永磁同步电机无差拍直接转矩控制系统研究[D].杭州: 浙江大学,2014.
[6] 李立毅,谭广军.基于Luenberger观测器的高速PMSM无传感器技术研究[J].微电机,2013,41(4): 31.
[7] ELLIS G. Observers in control systems-a practical guide[G].2002.
ResearchonApplicationofLuenbergerObserverinSensorlessControlofPermanentMagnetSynchronousMotor*
ZHOUShuangfei,HUANGHaibo,JIANWei
(School of Electrical & Information Engineering, Hubei University of Automotive Technology,Shiyan 442002, China)
In the vector control of permanent magnet synchronous motor (PMSM), according to the principle of Luenberger observer, a based on Luenberger observer of PMSM rotor speed and position estimation method was proposed, an effective solution to some drawbacks of the PMSM due to the installation of mechanical sensors. Using MATLAB/Simulink tool to build the control system simulation model and simulation, simulation results showed that the control system had good control performance. Finally, in STM32F103ZET6 as the control core of the hardware system for algorithm implementation. The experimental results showed that the PMSM control system based on Luenberger observer had high control precision and good stability.
permanentmagnetsynchronousmotor(PMSM);sensorlesscontrol;Luenbergerobserver
湖北省科技支撑计划项目(2015BAA049);湖北省自然科学基金项目(2014CFB378);湖北省教育厅科学研究计划项目(D20131802);智能驾驶控制湖北省重点实验室(筹)开放基金项目(ZDK2201402)
周双飞(1990—),男,硕士研究生,研究方向为节能与新能源汽车。
黄海波(1974—),男,博士,教授,研究方向为节能与新能源汽车。
TM 351
A
1673-6540(2017)10- 0059- 04
2017 -01 -31
猜你喜欢
防爆电机(2020年6期)2020-12-14
郑州大学学报(工学版)(2020年2期)2020-06-16
汽车电器(2019年2期)2019-03-22
光学精密工程(2016年3期)2016-11-07
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07
电测与仪表(2015年19期)2015-04-09
大电机技术(2015年5期)2015-02-27
电测与仪表(2014年11期)2014-04-04
组合机床与自动化加工技术(2014年12期)2014-03-01
