不确定混沌系统的鲁棒自适应容错同步控制
2017-09-15 12:04邓立为宋歌高俊山
电机与控制学报 2017年8期
邓立为, 宋歌, 高俊山
(哈尔滨理工大学 自动化学院,黑龙江 哈尔滨 150080)
不确定混沌系统的鲁棒自适应容错同步控制
邓立为, 宋歌, 高俊山
(哈尔滨理工大学 自动化学院,黑龙江 哈尔滨 150080)
针对一类带有执行器故障、非线性不确定性以及外界干扰的混沌系统,设计一个鲁棒自适应容错控制器,来实现主从混沌系统之间的同步容错控制。不需要知晓准确的故障信息以及外界干扰的上界,根据自适应律在线估计未知量。结合自适应控制技术,设计鲁棒自适应容错控制器,使得无论执行器是否有故障发生,主从两个混沌系统都能够实现同步。以经典的蔡氏混沌电路系统为例进行数值仿真,仿真结果验证了所设计控制器的有效性和可行性。
自适应控制;容错控制;混沌同步;执行器故障;外界干扰
0 引 言
混沌是一种复杂的非线性运动,由于混沌系统对初始条件和参数变化的极其敏感性和随机性,使得混沌同步在保密通信、生物工程,信息处理等领域中得到广泛的应用[1-3]。目前为止,学者们已经提出了许多有效的同步控制方法,例如线性与非线性反馈同步控制[4-5]、自适应同步控制[6]、滑模同步控制[7]、状态观测器控制[8]、模糊逻辑同步控制[9]等。文献[10]针对带有外部扰动和不确定性的混沌系统,设计一个鲁棒滑模控制器来实现两个混沌系统之间的同步。文献[11]设计一个模糊自适应观测器来实现带有非线性和死区输入的混沌系统的投影同步。文献[12]以带有未知参数和非线性输入的混沌系统作为研究对象,设计一个有限时间自适应控制器实现了两个不同的混沌系统之间的同步控制。
在研究混沌同步的过程中,学者们大多将重点放在混沌系统无故障的情况,来设计合适的控制器进行同步控制。然而,在实际应用的过程中,传感器、执行机构以及系统内部元件都不可避免地会发生故障,发生故障时传统的控制方法就会失效,破坏了主从系统之间的混沌同步。混沌同步广泛地应用在保密通信中,为了保证通信质量,设计一个可靠的容错控制器,使当有故障发生时,仍能保证主从系统之间达到同步时非常必要的。
近年来,容错控制引起了学者们的广泛关注。容错控制大体可以分为两类,即被动容错方法[13-14]和主动容错方法[15-16]。被动容错方法是利用鲁棒控制技术设计具有固定参数的控制器来保证系统的性能和稳定性[17]。这种方法设计简单,不需要在线计算和调节参数,但当可能出现的故障和系统冗杂增加时,控制器的设计将变得保守,所达到的控制效果不能令人满意。相比于被动容错控制,主动容错控制方法可以有效的解决上述问题。主动容错方法是指在故障发生后根据故障情况重新调整控制器参数,或改变控制器结构。主动容错控制一般利用自适应技术和故障诊断分离(fault detection and isolation,FDI)技术来实现。基于FDI的主动容错方法可以利用FDI机构提供故障信息,从而设计有效的控制器,但FDI时常会出现误报、漏报和传输延时等情况,使得提供的信息不够准确。基于自适应技术的容错控制方法不需要获知准确的故障信息,避免了上述可能出现的问题,是一种有效的容错控制手段。文献[18]结合线性矩阵不等式技术和自适应技术,设计一个自适应容错控制器,实现了对飞行器跟踪的容错控制。文献[19]以带有不确定参数和执行器故障的线性系统为研究对象,设计一个鲁棒自适应容错控制器,在有故障发生时仍能保证系统状态渐近稳定。文献[20]提出一个积分型自适应滑模容错控制方法应用在航天器姿态控制中,保证了系统的稳定性并提高了系统性能指标。
然而,到目前为止,国内外针对混沌同步的容错控制的相关研究成果却很少,因此,本文在上述研究成果的基础上,以带有执行器故障、外界干扰以及非线性不确定性的混沌系统作为研究对象,设计一个鲁棒自适应容错控制器,即使系统有故障发生时,仍能保证两个混沌系统之间的同步。不需要提前知道准确的故障信息,以及非线性不确定性和外界干扰的上界,并根据李雅普诺夫稳定性定理,给出了同步误差系统稳定性的证明。最后,以数值仿真的形式证明了鲁棒自适应容错控制器的有效性和可行性。
1 系统模型与问题描述
符号标记:R代表实数集,I代表适合维数的单位矩阵。对于矩阵M,MT代表它的转置,‖·‖代表欧几里得范数,(i=1,2,…,N)定义为I[1,N]。
考虑下列一类不确定的主从混沌系统:

(1)

E(y(t),y(t-τ),t)+
d(t)+uF(t))。
(2)
其中:x(t)∈Rn和y(t)∈Rn分别代表主系统和从系统的状态变量;A∈Rn×n和B∈Rn×m是常数矩阵;g(x(t),t)和g(y(t),t)为非线性函数,满足Lipschitz条件;E(y(t),y(t-τ),t)∈Rm是未知的非线性时延函数;d(t)∈Rm是外部扰动。

(3)

故障模型具体表示方式如表1所示。

表1 故障模型Table 1 Fault mode
定义
ρju(t)+σjus(t)。

那么,有如上结构的算子集可表示为
也可以定义为
其中Nρj包含最多有2m个元素。
为了方便下文的描述,对于所有的故障模式L,我们使用下列统一的执行器故障模型
uF(t)=ρu(t)+σus(t)。
(4)
其中ρ=diag{ρ1,ρ2,…,ρm}。
定义主从系统之间的误差为e(t)=y(t)-x(t),那么可以得到同步误差系统为

BE(y(t),y(t-τ),t)+
Bd(t)+BuF(t)。
(5)

为了方便下文控制器的设计,给出下列几个假设。
假设1 对于∀x∈Rn和∀y∈Rn,非线性函数g(·)满足下列Lipschitz条件
‖g(y,t)-g(x,t)‖≤γ‖y-x‖。
(6)
其中γ是未知的正常数。
假设2 对于∀y∈Rn,非线性时延项满足下列条件
‖E(y(t),y(t-τ),t)‖≤λ1‖y(t)‖+λ2‖y(t-τ)‖。
(7)
其中:λ1,λ2>0是未知的常数。

假设4 考虑同步误差系统(5),存在一个未知的正数α,对于所有可能的执行器故障模式都满足下列不等式
‖eT(t)PBρBTPe(t)‖≥α‖eT(t)PB‖2。
(9)

假设5 (A,B)是可控的,并存在一个常数矩阵K0,使得矩阵A-BK0满足Hurwitz。
注1:假设1和假设2表明,调节参数γ,λ1和λ2可使不确定非线性项和非线性时延项满足不等式成立的条件,文献[22]、文献[23]都做出了类似的假设。假设3说明非参数化卡死故障和外界扰动都是有界的,根据设计的自适应律可以估计上界的值。假设4说明,当带有故障的执行器仍然有效时,即ρi不全为0(i∈I[1,m])时,式(9)成立;当所有的执行器都无效时,即ρi=0(i∈I[1,m]),假设4不再成立。
令
(10)
(11)
2 鲁棒自适应容错控制器设计
在本节中,针对同步误差系统(5),设计一个鲁棒自适应容错控制器,使得无论执行器是否有故障发生,都能够保证同步误差系统渐近稳定,即实现主从系统达到同步。
鲁棒自适应容错控制器u(t)设计为如下形式
u(t)=-K0e+K(t)。
(12)
其中K0可以由等式(10)得到,K(t)为
(13)
其中


(14)
自适应律设计为如下形式:

(15)

(16)
(17)
(18)

(19)

旅游翻译要求译者向作者和读者靠拢,采取相应于译文作者和读者所使用的源语表达方式,来传达原文的内容。博物馆中常使用归化翻译是为了让外国友人更好地理解相关信息。
证明:当系统有执行器发生故障时,将式(4)带入式(5)中得到同步误差系统为:
BE(y(t),y(t-τ),t)+Bd(t)+
B(ρu(t)+σus(t))。
(20)
选取Lyapunov函数为V(t)=V1(t)+V2(t),其中:

(21)

(22)
对式(21)求导并结合误差系统(20)得到
eT(t)PB(g(y(t),t)-g(x(t),t))+
eT(t)PBE(y(t),y(t-τ),t)+
eT(t)PBd(t)+eT(t)PB(ρu(t)+
σus(t))。
(23)
对上式整理得到
P(A-BK0))e(t)+eT(t)PBK0e(t)+
eT(t)PB(g(y(t),t)-g(x(t),t))+
eT(t)PBE(y(t),y(t-τ),t)+
eT(t)PBd(t)+eT(t)PB(ρu(t)+
σus(t))。
(24)
由式(10)和式(11)可知

eT(t)PB(g(y(t),t)-g(x(t),t))+
eT(t)PBE(y(t),y(t-τ),t)+
eT(t)PBd(t)+eT(t)PB(ρu(t)+
σus(t))。
(25)
‖eT(t)PB‖‖(g(y(t),t)-g(x(t),t))‖+
‖eT(t)PB‖‖E(y(t),y(t-τ),t)‖+
‖eT(t)PB‖‖d(t)‖+
‖eT(t)PB‖‖σ‖‖us(t)‖+
eT(t)PBρu(t)。
(26)
根据假设1~3可得到:
γ‖eT(t)PB‖‖e(t)‖+
λ1‖eT(t)PB‖‖y(t)‖+
λ2‖eT(t)PB‖‖y(t-τ)‖+

eT(t)PBρu(t)。
(27)
根据式(12),将u(t)带入上式,得到
eT(t)PBρK0e(t)+eT(t)PBρK(t)+
γ‖eT(t)PB‖‖e(t)‖+
λ1‖eT(t)PB‖‖y(t)‖+
λ2‖eT(t)PB‖‖y(t-τ)‖+

(28)
eT(t)PBρK(t)+γ‖eT(t)PB‖‖e(t)‖+λ1‖eT(t)PB‖‖y(t)‖+
λ2‖eT(t)PB‖‖y(t-τ)‖+

(29)

eT(t)PBρK(t)+γ‖eT(t)PB‖‖e(t)‖+
λ1‖eT(t)PB‖‖y(t)‖+
λ2‖eT(t)PB‖‖y(t-τ)‖+
(30)

γ‖eT(t)PB‖‖e(t)‖+
λ1‖eT(t)PB‖‖y(t)‖+
λ2‖eT(t)PB‖‖y(t-τ)‖+
(31)
γ‖eT(t)PB‖‖e(t)‖+
λ1‖eT(t)PB‖‖y(t)‖+
λ2‖eT(t)PB‖‖y(t-τ)‖+
(32)
根据式(22),对V2(t)求导,得到
(33)
将自适应律(15)~式(19)带入上式,得到





(34)

2‖eT(t)PB‖‖K0e(t)‖-
γ‖eT(t)PB‖‖e(t)‖+
λ1‖eT(t)PB‖‖y(t)‖+
λ2‖eT(t)PB‖‖y(t-τ)‖+


(35)
化简得到
‖eT(t)PB‖φ(t)。
(36)
(37)
由上式可以得出,带有执行器故障、非线性不确定性和外部扰动的混沌同步误差系统(5)是渐进稳定的,当t→∞时,e(t)→0,即y(t)→x(t),说明使用所设计的控制器,能够实现主从混沌系统容错同步控制。
注2:当执行器没有故障发生时,即ρi=1且σi=0(i∈I[1,m])时,混沌系统的主从容错同步控制就变成了一般的主从混沌同步控制问题,我们所设计的鲁棒自适应控制器u(t)仍是有效的,假设4也仍然成立。
注3:在实际应用中,执行器故障、非线性不确定性和外界干扰等因素都会限制和影响控制器的使用,在选择控制对象时,将这些可能影响控制器使用的因素都考虑在内,提高了控制器的可靠性,使得控制器更加符合工程应用。
3 系统仿真研究
3.1 系统仿真参数设定
为了验证上述理论研究的正确性以及所设计的鲁棒自适应容错控制律的有效性,本节利用Matlab数值仿真的形式进行验证,选择经典的蔡氏混沌电路作为仿真模型。蔡氏电路是由美籍华裔学者蔡少棠在1983年提出的一种三阶非线性自治电路,它能表现出标准的混沌行为。蔡氏电路的状态方程形式为[22]:

(38)
其中:f(x1)=bx1+0.5(a-b)(|x1+1|-|x1-1|),选择a=-1.28,b=-0.69,那么,系统(37)可以写成和混沌主系统(1)相同的形式

(39)
其中:
(40)
考虑到混沌系统模型带有执行器故障、非线性时延和外界干扰,混沌从系统(2)可以写为

E(y(t),y(t-τ),t)+
d(t)+uF(t))。
(41)
其中,
E(y(t),y(t-τ),t)=
(42)
主系统的初始条件为x(0)=[0.1,-0.1,-0.1]T,带有非线性时延和外界扰动的从系统的初始条件为y(0)=[0.15,-0.15,-0.15]T,τ=1。图1和图2分别为主系统和从系统的混沌吸引子。

图1 主系统混沌吸引子Fig.1 Chaotic attractor of master system
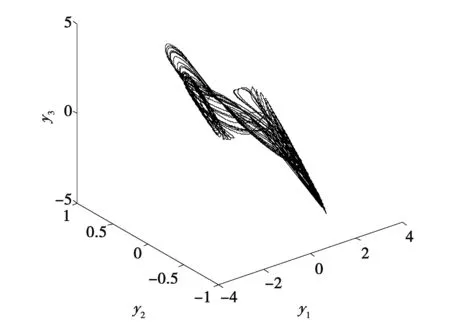
图2 从系统混沌吸引子Fig.2 Chaotic attractor of slave system
考虑几种可能的故障模型:


在仿真中,需要求出控制参数K0和P,根据等式(10)~式(11),求得
给定Q为3阶单位矩阵,求出P为



3.2 仿真结果分析


图3 同步误差的变化曲线Fig.3 Synchronization error

图4 控制参数K(t)的变化曲线Fig.4 Curves of controller parameters K(t)

图5 控制律的变化曲线Fig.5 Adaptive fault-tolerant control law

图6 α0的估计值Fig.6 Estimate of unknown parameter α0
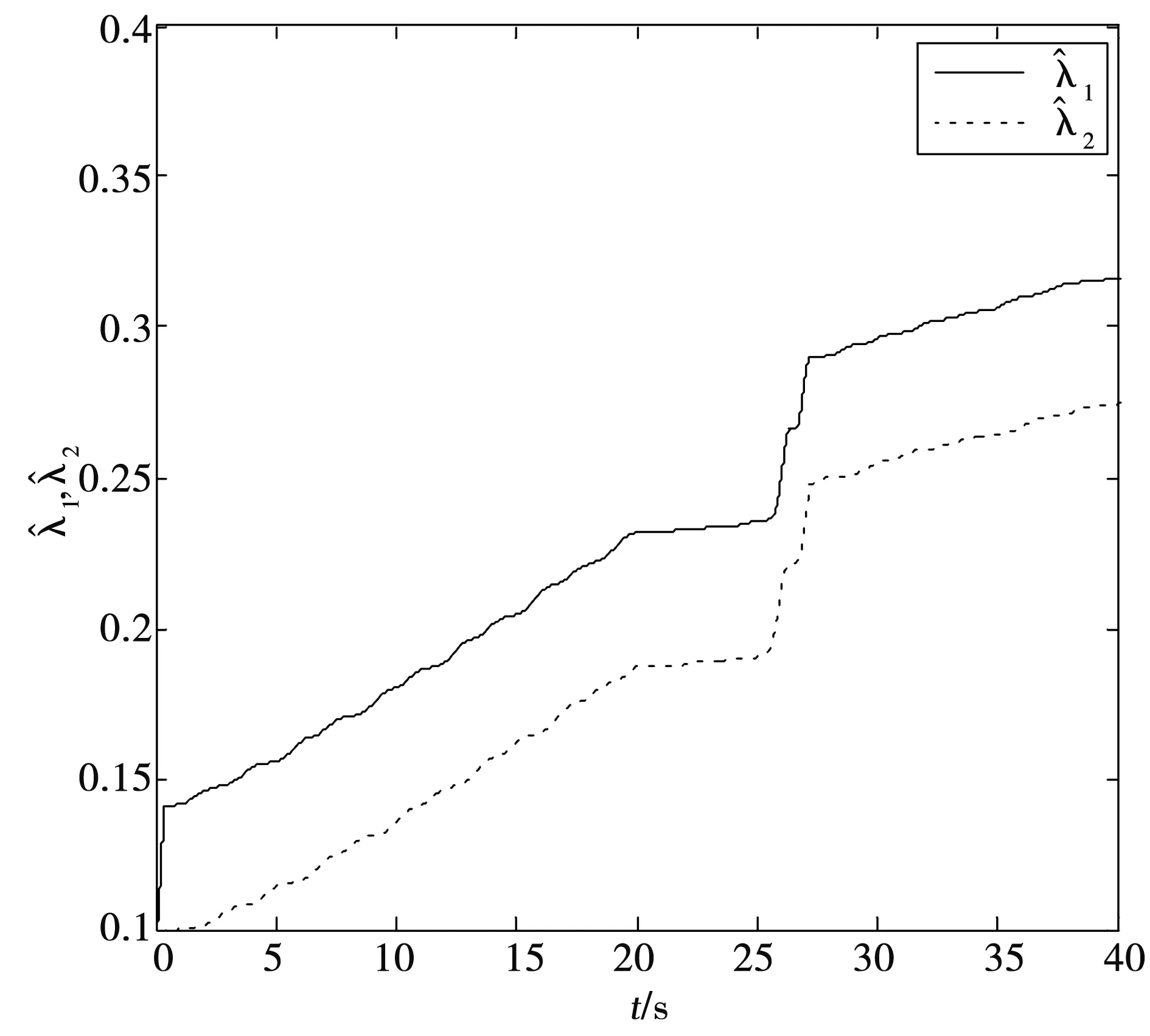
图7 λ1和λ2的估计值Fig.7 Estimate of unknown parameters λ1 and λ2

图8 γ的估计值Fig.8 Estimate of unknown parameter γ

图的估计值Fig.9 Estimate of unknown parameter system
从图3来看可知,故障没有发生时,在控制律的作用下,同步误差很快收敛到零点,在t=20 s时,执行器有故障发生,但在控制作用下同步误差仍能很快地收敛到零点,主系统和从系统仍能达到同步。从图4和图5来看可知,为了使同步误差快速收敛到零点,一开始控制律变化较大,在同步误差收敛到零点后,控制律趋于平稳,在故障发生时,控制作用迅速变化又使误差快速收敛到零点,使主从系统达到同步。从图6~图9可知,未知参数的估计值不需要收敛于它的真实值,这并不影响控制器的使用以及同步误差收敛于零点的情况[23-24]。
4 结 论
本文设计一个鲁棒自适应容错控制律,实现了带有执行器故障、非线性不确定性和外界扰动的主从混沌系统之间的同步容错控制。不需要提前知晓准确的故障信息以及非线性不确定性和外界扰动的上界,利用自适应控制技术,设计合适的自适应律来估计系统中未知量的值。结合自适应控制方法,设计了一个鲁棒自适应容错控制律,根据李雅普诺夫稳定性,证明了同步误差系统的渐近稳定性,并将蔡氏混沌电路作为仿真对象,仿真结果表明,无论执行器是否有故障发生,同步误差都能够很快的收敛到零点,实现了主从混沌系统之间的同步容错控制,本文所设计的控制律有较强的鲁棒性和容错能力。
[1] LU J, WU X,LÜ J. Synchronization of a unified chaotic system and the application in secure communication[J]. Physics Letters A, 2002, 305(6): 365.
[2] GUO L, HU M, XU Z, et al.Synchronization and chaos control by quorum sensing mechanism[J]. Nonlinear Dynamics, 2013, 73(3):1253.
[3] CHENG C J.Robust synchronization of uncertain unified chaotic systems subject to noise and its application to secure communication[J]. Applied Mathematics and Computation, 2012, 219(5): 2698.
[4} Yassen M. Controlling chaos and synchronization for new chaotic system using linear feedback control[J]. Chaos, Solitons & Fractals, 2005, 26(3):913.
[5] 陈志盛, 孙克辉, 张泰山. Liu混沌系统的非线性反馈同步控制[J]. 物理学报, 2005, 54(6):2580. CHEN Zhisheng, SUN Kehui, ZHANG Taishan. Nonlinear feedback synchronization control of Liu chaotic system[J]. 2005, 54(6):2580.
[6] PARK J H. Adaptive synchronization of a unified chaotic system with an uncertain parameter[J]. International Journal of Nonlinear Sciences and Numerical Simulation, 2005, 6(2): 201.
[7] CHEN D, ZHANG R, MA X, et al.Chaotic synchronization and anti-synchronization for a novel class of multiple chaotic systems via a sliding mode control scheme[J]. Nonlinear Dynamics, 2012, 69(1-2): 35.
[8] 李秀春, 谷建华, 王云岚, 等. 一类带有未知参数的受扰混沌系统的观测器同步[J]. 物理学报, 2011, 60(3): 030505. LI Xiuchun, GU Jianhua,WANG Yunlan, et al. Observer synchronization method for a class of perturbed chaotic systems with unknown parameters[J]. 2011, 60(3): 030505.
[9] 王银河, 高子林, 王钦若, 等. 基于自适应模糊逻辑系统的一类混沌系统同步控制[J]. 控制与决策, 2013, 28(9): 1309. WANG Yinhe,GAO Zilin, WANG Qinruo, et al. Synchronization control for a class of chaotic systems based on adaptive fuzzy logic systems[J]. Control and Decision, 2013, 28(9): 1309.
[10] AGHABABA M P, FEIZI H. Design of a sliding mode controller for synchronizing chaotic systems with parameter and model uncertainties and external disturbances[J]. Transactions of the Institute of Measurement and Control, 2012, 34(8): 990.
[11] BOULKROUNE A, M′SAAD M. Fuzzy adaptive observer-based projective synchronization for nonlinear systems with input nonlinearity[J]. Journal of Vibration and Control, 2011, 14(1):12.
[12] AGHABABA M P,AGHABABA H P. A general nonlinear adaptive control scheme for finite-time synchronization of chaotic systems with uncertain parameters and nonlinear inputs[J]. Nonlinear Dynamics, 2012, 69(4):1903.
[13] YANG G H, WANG J L,SOH Y C. Reliable Hcontroller design for linear systems[J]. Automatica, 2001, 37(5): 717.
[14] ZHANG D, WANG Z, HU S. Robust satisfactory fault-tolerant control of uncertain linear discrete-time systems: an LMI approach[J]. International Journal of Systems Science, 2007, 38(2):151.
[15] TANG X, TAO G, JOSHI S M. Adaptive actuator failure compensation for nonlinear MIMO systems with an aircraft control application[J]. Automatica, 2007, 43(11): 1869.
[16] FAN L L,SOGN Y D. On fault-tolerant control of dynamic systems with actuator failures and external disturbances[J]. Acta Automatica Sinica, 2010, 36(11): 1620.
[17] 金小峥, 杨光红, 常晓恒, 等. 容错控制系统鲁棒H和自适应补偿设计[J]. 自动化学报, 2013, 39(1): 31. JIN Xiaozheng, YANG Guanghong, CHANG Xiaoheng, et al. Robust fault-tolerant Hcontrol with adaptive compensation[J]. Acta Automatica Sinica, 2013, 39(1): 31.
[18] YE D, YANG G H. Adaptive fault-tolerant tracking control against actuator faults with application to flight control [J]. IEEE Transactions on Control Systems Technology, 2006, 14(6): 1088.
[19] LI X J, YANG G H. Robust adaptive fault-tolerant control for uncertain linear systems with actuator failures[J]. Control Theory & Applications, IET, 2012, 6(10):1544.
[20] QINGLEI H, ZHANG Y, XING H, et al.Adaptive integral-type sliding mode control for spacecraft attitude maneuvering under actuator stuck failures[J]. Chinese Journal of Aeronautics, 2011, 24(1): 32.
[21] CHEN M,CHEN W.Robust adaptive neural network synchronization controller design for a class of time delay uncertain chaotic systems[J]. Chaos, Solitons & Fractals, 2009, 41(5): 2716.
[22] MAHMOUD M S, AL-RAYYAAH A.Adaptive control of systems with mismatched non-linearities and time-varying delays using state measurements[J]. Control Theory & Applications, IET, 2010, 4(1):27.
[23] HAO L Y, YANG G H. Fault tolerant control for a class of uncertain chaotic systems with actuator saturation[J]. Nonlinear Dynamics, 2013, 73(4): 2133.
[24] JIN X, YANG G, LI Y. Robust fault-tolerant controller design for linear time-invariant systems with actuator failures: an indirect adaptive method[J]. Journal of Control Theory and Applications, 2010, 8(4): 471.
[25] 高庆忠,关焕新,于子淞,等. 自适应补偿器永磁同步电机积分型连续滑模控制[J]. 电机与控制学报,2017,21(2):103. GAO Qingzhong, GUAN Huanxin, YU Zisong. Integral continuous sliding mode control strategy with adaptive compensator for permanent magnet synchronous motor[J]. Electric Machines and Control, 2017, 21(2): 103.
[26] 王琦, 陈龙胜. 非仿射纯反馈不确定系统预设性能鲁棒自适应控制[J]. 电机与控制学报, 2017, 21(2):109. WANG Qi, CHEN Longsheng. Prescribed performance adaptive robust control for a class of uncertain non-affine pure feedback system[J]. Electric Machines and Control, 2017, 21(2):109.
(编辑:贾志超)
Rubostadaptivefault-tolerantsynchronizationcontrolforuncertainchaoticsystems
DENG Li-wei, SONG Ge, GAO Jun-shan
(School of Automation, Harbin University of Science and Technology,Harbin 150080, China)
A robust adaptive fault-tolerant control scheme is designed to achieve the master-slave fault-tolerant synchronization for a class of chaotic systems with actuator failures, nonlinear uncertainties and external disturbances. Both accurate information of faults and upper bound of external disturbances are unknown,and the adaptive laws are proposed to estimate the unknown parameters online. Combined with adaptive control technology, a robust adaptive fault-tolerant controller was constructed to realize synchronization between master and slave systems whether the faults happen or not. A numerical simulation example of the classical chua′s circuit system was given,and the effectiveness and applicability of the proposed control scheme was proved by the simulation results.
adaptive control; fault-tolerant control; chaos synchronization; actuator failures; external disturbances
2016-07-19
黑龙江省自然科学基金(F201307)
邓立为(1983—),男,博士,讲师,研究方向为分数阶混沌系统、非线性控制; 宋 歌(1993—),女,硕士研究生,研究方向为混沌系统; 高俊山(1962—),男,博士,教授,研究方向为自动控制、混沌理论、鲁棒控制。
宋 歌
10.15938/j.emc.2017.08.016
O 415.5/O 231.2
:A
:1007-449X(2017)08-0114-09
猜你喜欢
自动化学报(2019年6期)2019-07-23
制造技术与机床(2017年6期)2018-01-19
自动化学报(2017年4期)2017-06-15
制造技术与机床(2017年2期)2017-05-04
电测与仪表(2016年24期)2016-04-12
探测与控制学报(2015年4期)2015-12-15
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
浙江大学学报(工学版)(2015年1期)2015-03-01
舰船科学技术(2015年8期)2015-02-27
航天返回与遥感(2014年5期)2014-07-31