基于驾驶意图识别的发动机转矩迟滞补偿策略*
2017-08-22 06:13:40解庆波刘永刚
汽车工程师 2017年12期
解庆波 刘永刚
(1.比亚迪汽车工业有限公司;2.重庆大学)
不同的驾驶员意图会对混合动力汽车(HEV)各动力源之间的转矩分配产生影响,从而较大的影响了汽车的动力性与经济性[1]。因此,在制定HEV转矩分配策略时应充分考虑驾驶意图对汽车动力性与经济性的影响。文献[2-4]利用加速/制动踏板开度对汽车的驾驶意图进行识别;文献[5]利用加速度均值和加速度均方差对驾驶意图进行识别,根据驾驶意图对汽车的驱动控制策略进行优化;文献[6]采用模糊识别理论,以加速/制动踏板开度和开度变化率、车速及加速度等作为识别参数,制定模糊推理规则,并以逻辑门限为基础设计了基于驾驶意图识别的控制策略。汽车在行驶过程中,由于发动机本身固有的转矩响应迟滞特性,在运行过程中,实际转矩跟不上目标扭矩,驾驶员需求的动力性能会减弱,尤其在急加速时发动机不能及时响应,导致加速缓慢,因此,文献[7]提出利用电动机的快速响应特性随时补偿发动机的迟滞转矩;同时,文献[8-10]提出了在汽车行驶过程中,利用电动机转矩补偿发动机的转矩协调控制策略,然而汽车在行驶过程中会频繁地利用电动机随时补偿发动机输出的不足转矩,增加电池电量的消耗。文章利用驾驶员在驾驶过程中踩下加速踏板开度(α)和加速踏板开度变化率(Δα)对驾驶意图进行识别,提出了基于模糊控制的驾驶意图转矩补偿系数(β)求解方法,对电动机补偿发动机的迟滞转矩进行优化,建立了基于驾驶意图识别的转矩补偿控制策略,所制定的补偿策略与没有加入驾驶意图识别的补偿策略相比,电池电量消耗降低了 0.036 kW·h。
1 整车动力系统分析与结构参数
1.1 整车动力系统结构
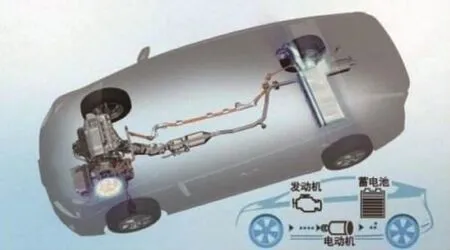
采用单电机并联式混合动力总成结构,根据行驶条件的不同可实现发动机单独驱动、电动机单独驱动、发动机-电动机并联驱动、发动机驱动电动机行车发电、松油门回馈及制动回馈6种行驶模式。混合动力电动汽车结构简图,如图1所示。
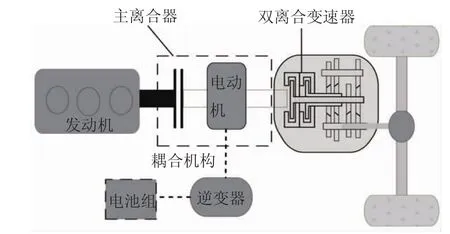
图1 混合动力电动汽车结构简图
1.2 整车动力系统参数
该混合动力汽车动力系统参数,如表1所示。
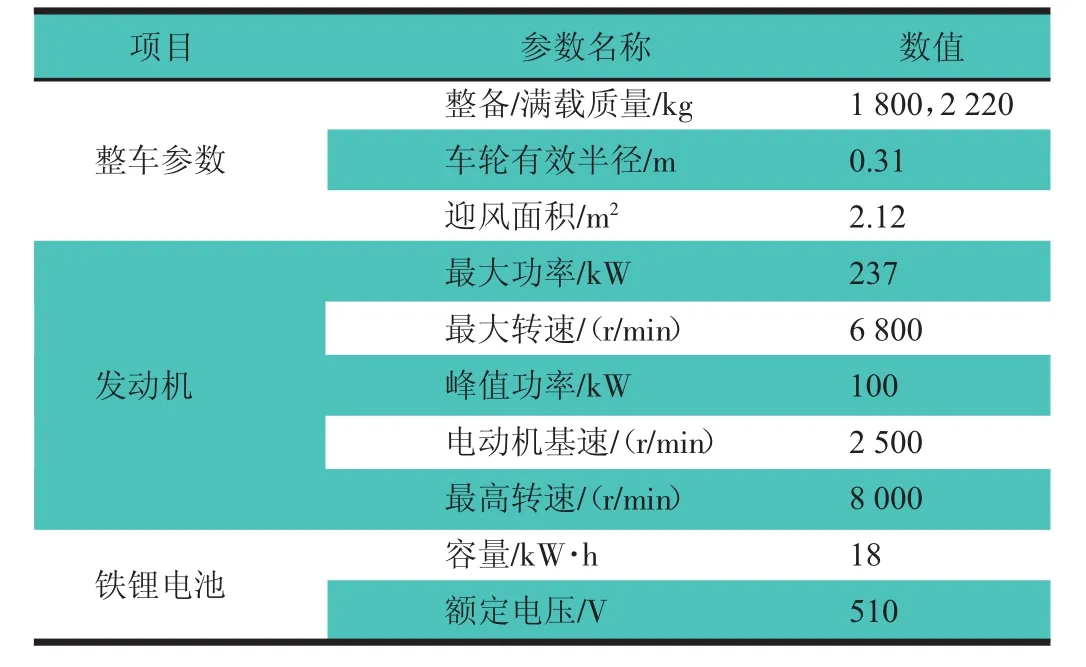
表1 混合动力电动汽车整车主要参数
2 驾驶意图的识别方法
文章通过对驾驶员在行车过程中踩下加速踏板的开度与开度变化率来判断驾驶员需求加速紧急情况,利用模糊控制方法确定驱动补偿转矩,在满足驾驶员驱动需求的同时,尽量降低因电动机补偿发动机迟滞转矩所消耗的电量。
2.1 数据采集
为了更好地辨别驾驶员的意图,利用试验车在试验场地对3位驾驶员不同的驾驶意图下踩下的油门踏板进行数据采集并进行后期处理分析,得出试验数据,如图2所示。并通过计算可以得出,紧急加速状态下的驾驶员踩下油门踏板变化率为70%/s左右,一般状态下的驾驶员踩下油门踏板变化率为15%/s左右,缓慢状态下的驾驶员踩下油门踏板变化率为6%/s左右。
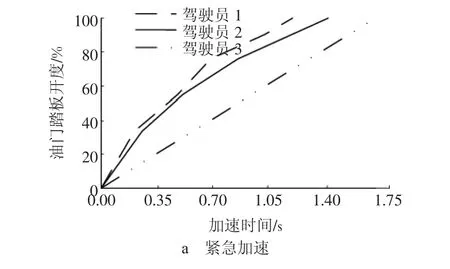
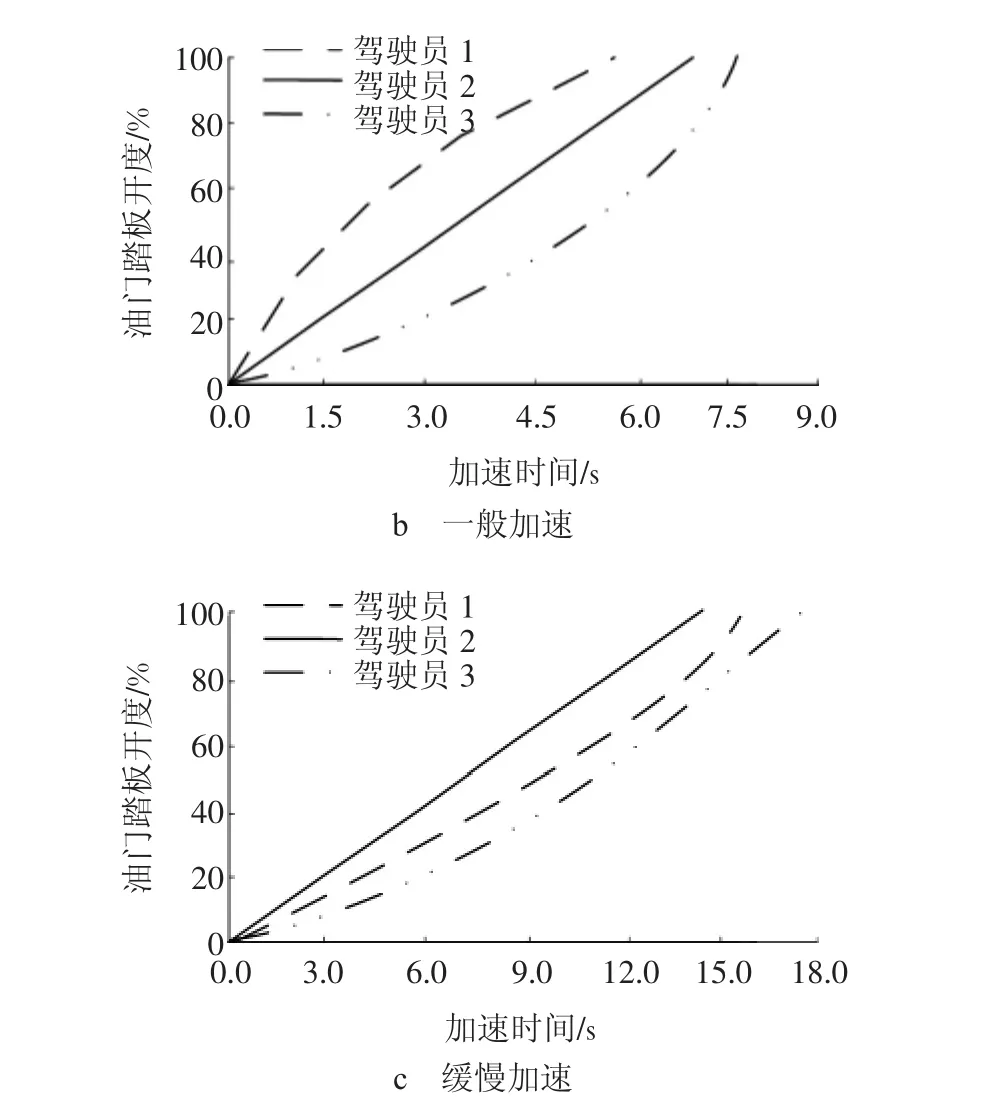
图2 不同驾驶意图下加速时间与油门踏板开度的关系曲线图
2.2 驾驶意图识别参数的确定
为满足驾驶员的转矩需求,需要利用电动机的快速响应特性补偿发动机的响应迟滞。通过对α,Δα的分析,结合模糊控制方法确定β,利用β与发动机迟滞转矩得到电动机最终补偿发动机的转矩。
为了保持信号的稳定性,对当前加速踏板的值(ΔAPP(k))采用增量式调节方式[11],如式(1)所示。

设定α为0~100%,Δα为限定步长内ΔAPP(k)的值,设定Δα最大值为100%/s[12]。
2.3 模糊驾驶意图控制器的设计
文章将模糊控制用于驾驶员驱动意图的推理。在实际设计过程中剔除α和Δα为负的情况,选取α≥0的情况。控制器输入变量为α和Δα,输出变量为β。
α,Δα,β的模糊控制规则,如表2所示,其输入输出量的隶属度函数,如图3所示。表2中,α的语言变量为:{小(S),中(M),大(B),很大(VB)},论域为 0~100%;Δα 的语言变量为:{小(S),中(M),大(B),很大(VB)},论域为 0~100%/s;β的语言变量为:{很小(VS),小(S),中(M),大(B),很大(VB)},论域为 0~100%。

表2 驱动意图模糊控制规则
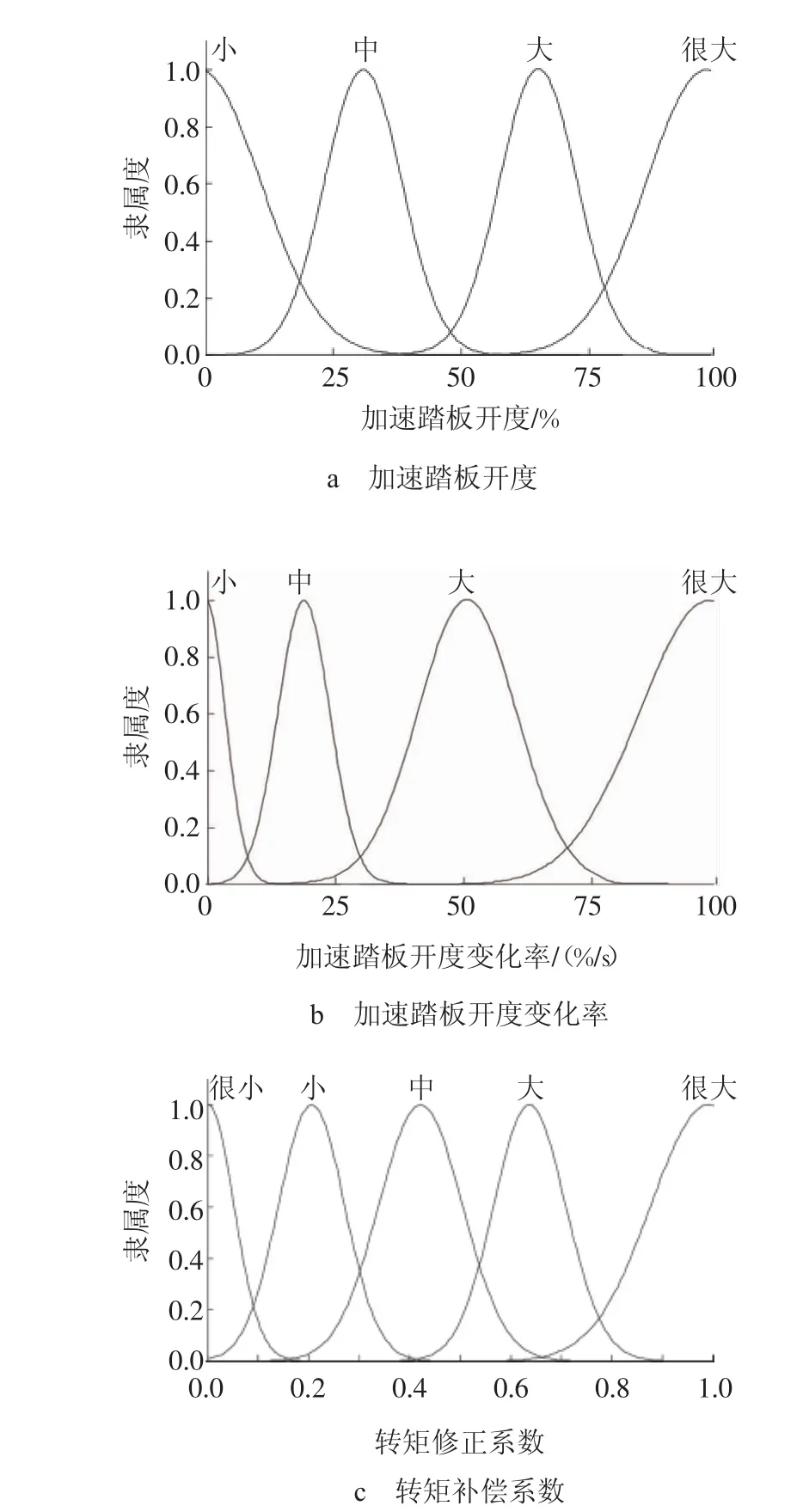
图3 驾驶员驱动意图输入输出量的隶属度函数
驾驶意图识别修正系数模糊控制的主要思想是:根据α和Δα判断驾驶员对加速需求的紧急程度,根据紧急程度利用电机的快速瞬态响应特性弥补发动机的响应迟滞转矩,从而满足驾驶员的加速意图。
3 转矩补偿策略
利用β对汽车行驶过程中的发动机迟滞转矩进行补偿,其表达式,如式(2)所示。

式中:Tv——汽车当前需求转矩,N·m;
Treal——发动机实际输出转矩,N·m;
Te,Tm——发动机、电动机目标转矩,N·m。
驾驶意图转矩补偿控制策略示意图,如图4所示。具体实施步骤:1)通过驾驶员对汽车的操纵,确定了采用α和Δα计算驾驶意图识别系数的方法;2)利用识别出的β,确定了驾驶意图转矩补偿策略;3)在汽车行驶过程中,提取α和Δα,利用模糊规则输出β,结合发动机目标与实际转矩,利用式(2)确定电动机补偿转矩,从而实现最终的转矩分配。
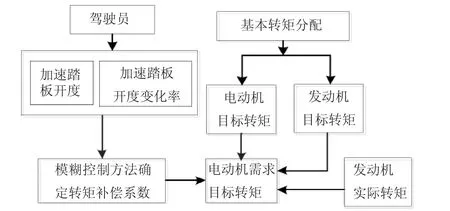
图4 驾驶意图转矩补偿策略示意图
4 仿真及结果分析
利用仿真模型验证采用基于转矩补偿系数进行的电动机转矩补偿策略与采用电动机全部补偿发动机转矩迟滞策略所带来的电量消耗差异,该HEV的动力系统参数,如表(1)所示,选取NEDC工况作为测试工况。在NEDC工况下的仿真结果,如图5所示;电动机转矩变化曲线、电池电流变化曲线及动力电池电量变化曲线,如图5所示。
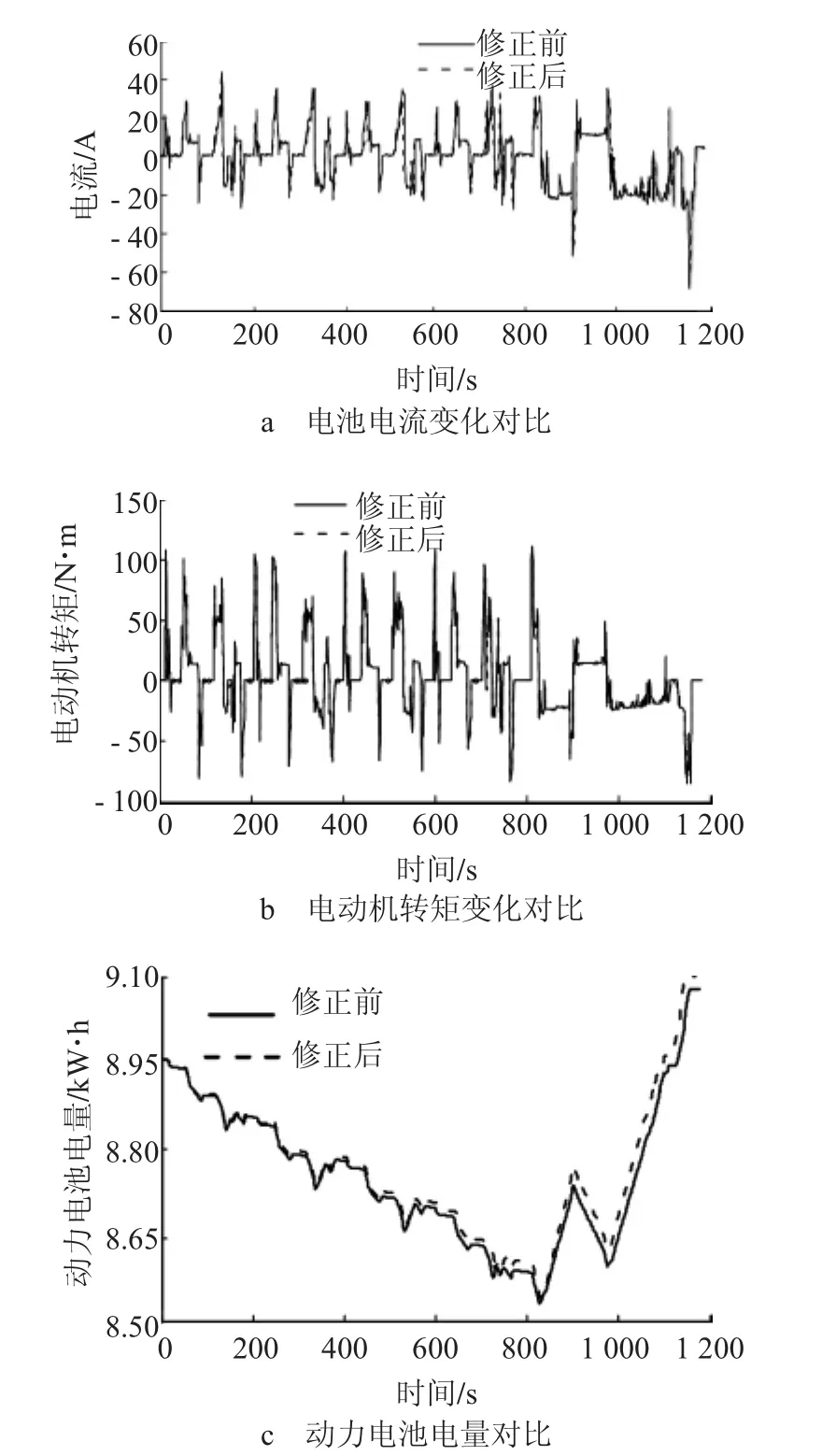
图5 NEDC工况下整车仿真结果对比
图5a与图5b表明:整车可以根据不同的驾驶意图进行转矩补偿,在发动机单独驱动和并联驱动模式下减少驱动转矩的补偿,以及在行车发电模式下相应的减少驱动转矩的补偿以增加发电转矩。
采用驾驶意图转矩补偿系数和采用电动机全部补偿发动机转矩迟滞策略的整车能耗变化对比,如表3所示。

表3 整车能耗变化对比
通过图5c与表3可知,采用驾驶意图转矩补偿系数后,相对于采用电动机全部补偿发动机转矩迟滞转矩策略,电池电量始末变化分别为0.145 8,0.109 8 kW·h,动力电池电量略有升高,可见,加入驱动转矩补偿修正系数后,驾驶员在驱动过程中电池消耗的电量有所降低。
5 结论
1)通过驾驶员对汽车加速踏板操纵的分析,确定了基于α和Δα的驾驶意图识别系数计算方法与转矩补偿方法;2)利用仿真模型对所提出的策略进行验证分析,结果表明:所制定的基于驾驶意图识别转矩补偿控制策略相对于电动机全部补偿发动机迟滞转矩策略相比,在NEDC工况下电量消耗减少了0.036 kW·h。
猜你喜欢
车主之友(2022年6期)2023-01-30 07:58:16
法律方法(2022年2期)2022-10-20 06:42:20
福建基础教育研究(2022年4期)2022-05-16 08:48:40
科学与财富(2021年33期)2021-05-10 16:54:38
北京汽车(2021年2期)2021-05-07 03:56:26
电站辅机(2021年4期)2021-03-29 01:16:52
法律方法(2021年3期)2021-03-16 05:56:58
黄河之声(2019年23期)2019-12-17 19:08:43
汽车实用技术(2019年17期)2019-09-21 03:46:32
黄河之声(2017年13期)2017-01-28 13:30:17