纯电动汽车CAN信号解析*
2017-08-22 06:13:54辛明华郭艳萍窦汝振苟毅彤
汽车工程师 2017年12期
辛明华 郭艳萍 窦汝振 苟毅彤
(天津清源电动车辆有限责任公司)

20世纪80年代推出了串行数据通信协议CAN,使得汽车上控制系统和检测系统之间的数据通信和资源共享问题得到非常有效的解决[1]。CAN发展至今也衍生出众多更加完整规范、互用性更强的通信协议,使得其在传统动力汽车中越来越普及和“低配”。它的同步性以及实时性等众多优点也使得CAN总线技术在电动汽车中继续被推崇和使用。因此在对标纯电动汽车时,解析车辆的CAN信号是分析整车性能、功能和控制策略非常关键的前提条件之一。文章阐述了对国外某纯电动车CAN信号的解析过程,最终形成dbc文件,同时对解析出的CAN信号进行匹配验证。
1 CAN总线解析流程
CAN总线解析流程为:1)分析数据链路层的帧类型(标准帧或扩展帧)以及报文的格式(Intel格式或Motorola格式);2)解析总线网络拓扑结构,分析各子网络的控制部件;3)找出关键信号进行信号解析;4)校验解析的信号是否正确。
1.1 总线拓扑结构解析
通常汽车网络结构采用多条不同速率的总线分别连接不同类型的节点,并使用网关服务器来实现整车的信息共享和网络管理。通过实车查找,并结合样车的原理图及维修手册等资料,依次关闭控制器,确定报文控制器对应关系,得出CAN网络拓扑结构。图1示出某纯电动汽车CAN网络拓扑结构。
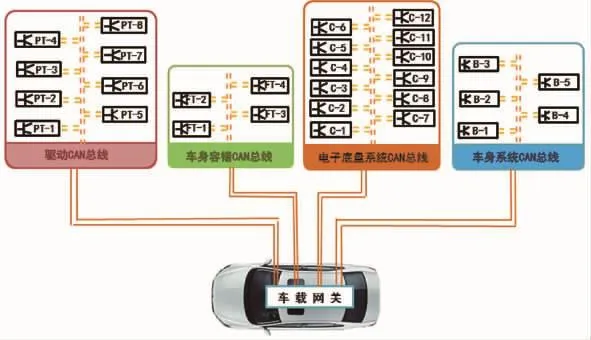
图1 某纯电动汽车CAN网络拓扑结构显示界面
驱动CAN总线系统的受控对象主要包括电机控制器、电池管理系统、DC/DC及充电机等电驱动总成部件,系统的受控对象直接关系到汽车的行驶状态,对通讯实时性有较高的要求;车身容错CAN总线系统受控对象包括寒地气候加热模块及座椅控制记忆模块等附加功能配置;电子底盘系统CAN总线系统受控对象主要包括助力转向控制单元、操纵稳定控制器、被动安全控制器、胎压监测控制器和电子驻车系统控制器等底盘系统控制部件;车身系统CAN总线系统受控对象主要包括门锁、车窗、后视镜及照明等控制单元,该总线为低速CAN总线。
按照总线拓扑结构,梳理需要解析的关键CAN信号的参数列表,如表1所示。
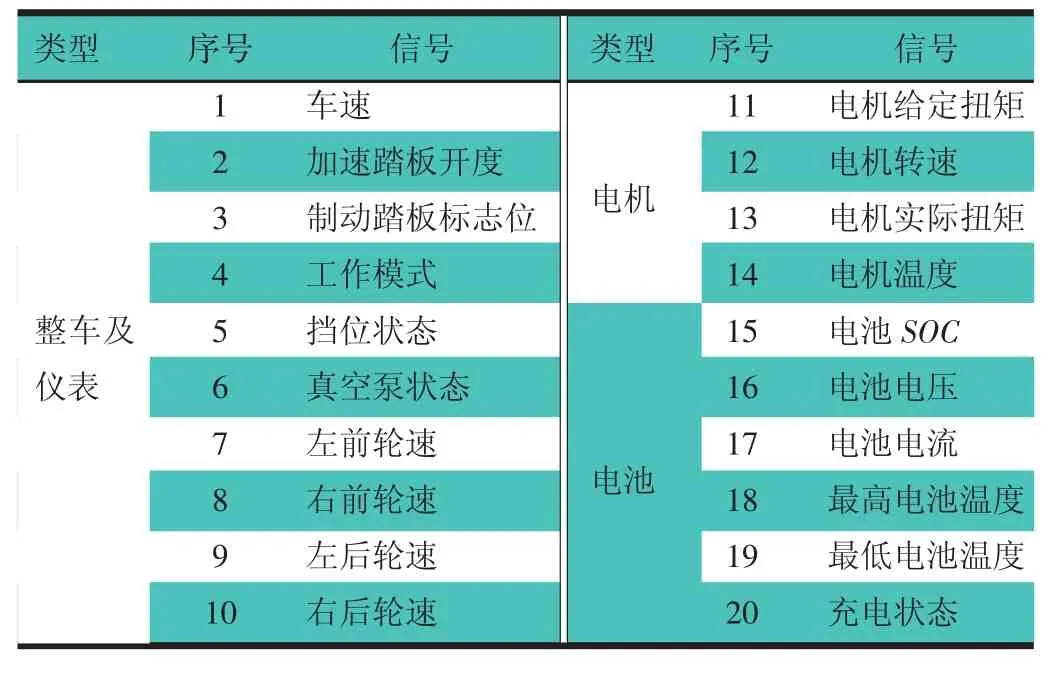
表1 某纯电动汽车CAN总线信号列表
1.2 总线信号解析
判断整车诊断接口是否有动力CAN,如果有则直接连接CANoe(CANoe是一款汽车总线开发环境,可以对CAN通信网络进行建模、仿真、测试和开发)[2],如果没有可以通过其他控制器CAN接口将CAN线并出,接入CANoe进行CAN信号的采集。并线和CANoe监控报文示意图,如图2所示。
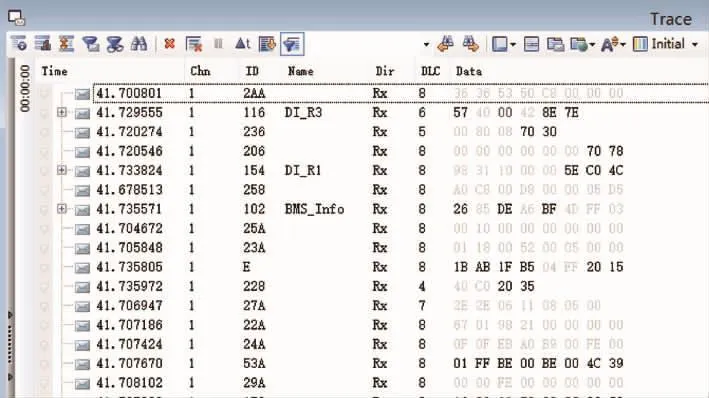
图2 整车CANoe监控报文示意图
对驱动系统结构进行分析,制定关键信号的解析策略。确定能够反映出各个信号的典型工况。挡位、车速及电池SOC 3个信号的测试工况为:
挡位:将汽车启动,进行换挡操作,通过CANoe采集整车CAN报文,并将仪表显示的挡位信号一同记录;
车速:启动汽车,挂挡,轻踩踏板,保持整车其他工况不变,通过CANoe采集整车CAN报文(如车速为5,10,15 km/h等),并将仪表显示的挡位信号一同记录;
电池SOC:在汽车充电时,通过CANoe采集整车CAN报文,在 SOC 为 30%,40%,50%,60%,70%,80%,90%,100%时分别记录报文。
上述记录报文的时间要很短,数据过多会影响分析的速度。将采集到的数据结合当时的工况,通过CANoe及MATLAB等工具对数据进行解析。
在解析的过程中确定如下内容:1)信号所在的ID;2)信号在报文里是Motorola格式还是Intel格式;3)信号在各个ID中的起始字节、起始位和信号长度;4)确定信号的比例因子和偏移量。在确定以上内容后,最终形成的dbc文件,如图3所示。

图3 某纯电动车dbc文件
1.3 总线信号校验
将解析出来的CAN信号,形成用于监控的dbc文件,使用CANoe工具建立工程文件,加载解析出的dbc文件,在实车上进行验证。比较监控显示的结果和整车仪表显示的报文是否一致,如果一致,证明报文解析是正确的。车速、电池SOC及挡位3个信号的校验测试方法,如表2所示。

表2 某纯电动车总线信号校验方法
2 结论
文章对纯电动汽车CAN信号解析进行了研究。通过对CAN总线解析流程的梳理,结合对标车型总线结构形式分析,以通用类CAN总线开发环境为基础,进行总线信号解析,并且对解析结果进行校验,为工作人员提供了后续思路,并对纯电动汽车整车控制策略解析和零部件性能分析起到了重要作用。
猜你喜欢
汽车电器(2022年9期)2022-11-07 02:16:24
铁道通信信号(2020年4期)2020-09-21 09:15:24
中国外汇(2019年11期)2019-08-27 02:06:30
中国铸造装备与技术(2017年6期)2018-01-22 01:50:04
汽车维修技师(2017年6期)2017-11-18 06:01:49
铁道通信信号(2016年8期)2016-06-01 12:10:21
电测与仪表(2015年1期)2015-04-09 12:03:02
电测与仪表(2015年19期)2015-04-09 11:32:44
设备管理与维修(2015年9期)2015-03-16 02:24:04
汽车维护与修理(2015年5期)2015-02-28 12:16:30