浅谈四足机器人的发展历史、现状与未来
2017-06-05 14:59朱秋国浙江大学
杭州科技 2017年2期
文 / 朱秋国 浙江大学
浅谈四足机器人的发展历史、现状与未来
文 / 朱秋国 浙江大学
自然界中的四足哺乳动物遍布于地球各个大陆上,在地形环境适应性、运动灵活性和运动效率等方面具有显著优势,它们几乎能在任何陆地上活动,不仅可以在崎岖复杂地形环境下快速移动,有些还具有较好的负重能力。它们通过不同的方式适应了环境的变迁,并在自然界中得以生存和繁衍。
四足机器人的发展轨迹
借鉴四足动物独特的运动特点,机器人学者开始了四足机器人的研究。
20世纪60年代,McGhee研制了世界上第一台四足机器人。此后,国内外研制了一批先进的四足机器人,其中最具划时代意义的当属美国波士顿动力公司的Big-Dog,其出众的运动能力以及强大的地形适应能力,使得它能够适应山地、斜坡、丛林、冰面、雪地等复杂地形。近年来,具有强地形环境适应能力、高动态运动能力以及大负载能力的四足机器人越来越受到学者的重视。这些特点使四足机器人在非结构化地形环境下的物质运输、灾后救援、野外勘探、高危环境作业等领域具有较好的应用前景。
20世纪80年代,MIT Leg-Lab开展了腿足动态运动控制研究。他们在研制成功单腿机器人的基础上,将控制算法拓展应用到了四足机器人中。四足机器人类似于将四个单腿机器人前后两两结合在一起,并在该机器人上实现了踱步、对角小跑以及跳跃三种步态,这是早期运动性能最为出色的四足机器人。这项研究为后续波士顿动力公司的四足机器人开发奠定了基础。
2005年,美国波士顿动力公司推出的BigDog是四足机器人发展的一个重要里程碑。BigDog采用了伺服液压缸作为其腿部的驱动器,配套了汽油发动机,为负重型四足机器人的研制提供了新思路,成功地实现了雪地、冰面、瓦砾等复杂地面下的稳定行,且在受到侧向强扰动的情况下仍能保持平衡。LS3进一步改进了身体结构设计,实现了更大的负载能力,对野外复杂地形的通过能力和适应性有了进一步提高。在快速性方面,Cheetah的室内奔跑速度达到了45.5km/h,而WildCat在运动时可以实现小跑、跳跃和奔跑间的相互切换,是目前唯一可以在室外完成gallop奔跑的四足机器人。

图1 MIT早期的单腿、双足和四足机器人

图2 BigDog、LS3、Cheetah和WildCat
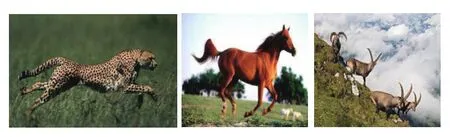
由于上述机器人的液压伺服系统需要发动机提供动力,存在自身质量重和噪声大等问题,为此,波士顿动力公司研发了Spot和Spot Mini。Spot总重量约72千克,采用电液混合驱动,降低了运动噪声,可实现静态行走、对角小跑等步态,通过搭载的感知单元,可以在野外环境下稳定行走、上斜坡、上台阶,在受到侧向推力时可以自主恢复平衡。Spot Mini重量更轻且完全采用电机驱动,极大地降低了运动噪声,运动更为灵活,在Spot Mini上还可以搭载机械臂,完成物品抓取、递送、开门等复杂动作。除此之外,在2012年MIT研制了全电机驱动的四足机器人Cheetah,该机器人通过力矩电机的反驱作用,实现对地面碰撞能量的回收,具有极高的能量利用率。采用虚拟力模型,通过地面反作用力控制,实现了trot和bound步态运动,以及gallop步态的仿真控制。2016年,苏黎世联邦理工学院推出了新一代四足机器人ANYmal,该机器人被设计用于恶劣环境下的自主作业,其躯体上安装了激光传感器和摄像机,用以感知环境地形进行地图构建和自定位,能够自主规划导航路径并且合理选取落脚点,已被应用于油气站的工业检测,在携带电池的情况下自重不超过30kg,能完成2小时自主巡检作业。
我国四足机器人的研究进展
国内四足机器人的研究起步较晚,但也取得了一定的进展。2010年,为了提高国内四足机器人研究水平,缩小与国外的差距,国家863计划先进制造技术领域启动了“高性能四足仿生机器人”项目,旨在开展新型仿生机构、高功率密度驱动、集成环境感知、高速实时控制等四足仿生机器人核心技术研究,以建立高水平四足仿生机器人综合集成平台。山东大学、国防科技大学、哈尔滨工业大学和上海交通大学均展开了液压驱动的四足机器人研究工作,分别研制了各自的液压驱动四足机器人样机,在2013年国家地震紧急救援训练基地进行了沙砾石地面、凹凸地形和坡道地形上的行走测试。中国北方车辆研究所研制的山地四足仿生机器人在“跨越险阻2016”中正式亮相,比赛成绩优异。
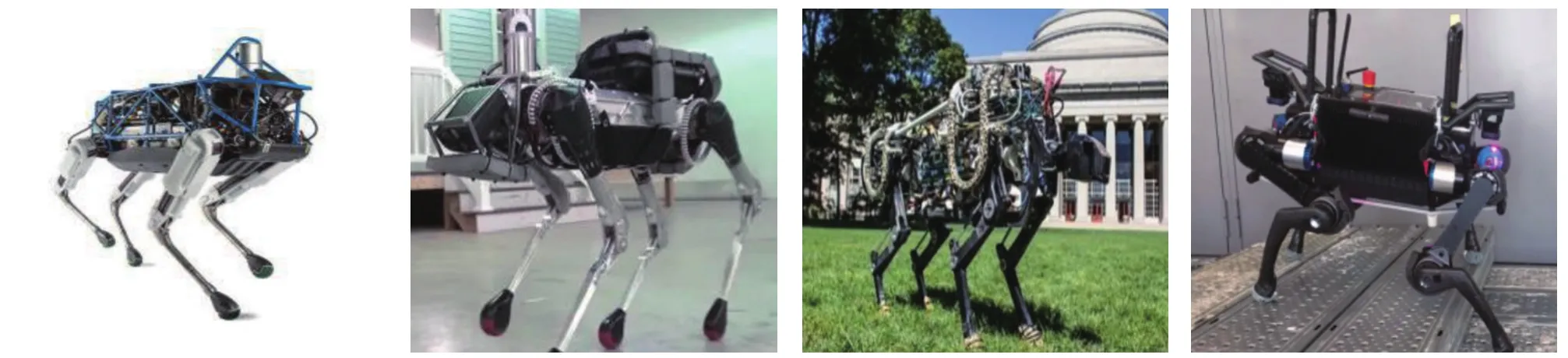
图3 Spot、pot Mini、MIT-Cheetah和ETH-ANYmal

图4 山东大学、国防科技大学、哈尔滨工业大学、上海交通大学和中国北方车辆研究所的四足机器人
浙江大学自2011年开始研究单腿机器人的动态平衡控制与高能效问题。先后开展了带脚踝关节的单腿机器人高能效跳跃和欠驱动单腿机器人的动态平衡控制研究。针对冗余多关节单腿机器人,通过研究膝踝关节刚度匹配问题,使得膝踝在跳跃过程中呈现较高的协调性,从而实现了最高跳跃高度35cm,最高跳跃能效值CoT为0.29。而平面内的单腿动态平衡跳跃运动,在跳跃过程中不仅需要满足预期的前进速度,还要保持身体的平衡性,最终实现了0.8m/s的稳定前进跳跃。这些研究工作为后期研制四足机器人“赤兔”奠定了基础。

图5 单腿机器人高能效跳跃与动态平衡控制
2016年,浙江大学-南江机器人联合研究中心在第3次世界互联网大会上推出了四足仿生机器人“赤兔”。“赤兔”全身12个自由度,身长1m,宽0.5m、高0.6m,总重65kg,负载50kg,全身关节采用力矩电机进行驱动,通过加入小减速比的齿轮箱,实现了关节的力矩、速度和位置控制。“赤兔”机器人具有爬坡、爬楼梯、崎岖路面行走、小跑和奔跑等功能,目前最快跑步速度超过6km/h。
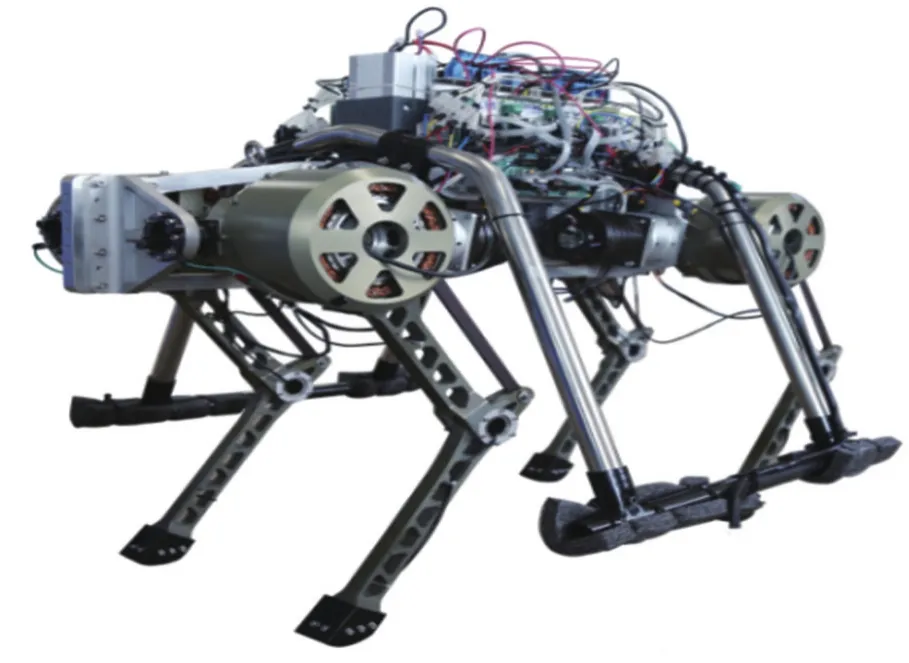
图6 四足仿生机器人“赤兔”
在四足机器人爬行步态中,浙大根据步态特性引入了状态机进行步态控制,建立了在线运动规划流程,提出一种基于COG(Center of Gravity)稳定性判据的路径规划方法与基于ZMP(Zero Moment Point)稳定性判据的重心轨迹规划方法,有效保证了四足机器人身体运动轨迹的光滑性以及四足移动行走的稳定性。对于未知地形,提出了一种足端轨迹规划方法确保四足机器人有效实现未知复杂地形上的摆动腿跨步。同时,根据感知策略获取的地形信息,提出了四足机器人躯体的质心高度和姿态对于未知复杂地形的自适应控制方法。
针对四足机器人的bound奔逃步态,浙大提出了一种竖直虚拟弹簧模型,通过规划机器人对地面的反作用力轮廓和相应控制率,实现机器人的跳跃运动。同时,引入了相位实时反馈计算,用于修改机器人运动过程中的节律偏差,最终实现了bound奔跑运动,也是目前国内唯一实现奔跑的电驱型四足机器人。
四足机器人的发展趋势
纵观国内外四足机器人的发展现状,我认为四足机器人未来的发展趋势可能有以下几方面:
四足机器人将根据负载大小决定驱动的类型,电机驱动四足机器人系统开发和控制相对容易,在低噪声上具有优势,适用于中小型、低负载和低成本的平台开发;而液压驱动四足机器人尽管在运动快速性和大负载上都可以发挥其优势,但是噪声大,易漏油,更适用于室外应用。
在快速稳定上,除了波士顿动力公司之外,快速稳定跑步控制仍然是一项重大挑战,因此开发快速跑步运动,且具有较强环境适应能力的四足机器人仍然将是机器人领域的研究热点。

图7 面向台阶地形的自适应行走与前向跳跃运动
腿足机器人由于每次落地与地面存在较大的碰撞,容易造成能量的损失,在有限能源的情况下,如何实现更加高能效的运动,开发更好性能的仿生机构和控制算法是未来的发展趋势之一,另外结合腿足与轮式的优势,开发出具有更强适应环境的混杂机器人系统,也许是一种更好的方式。
发掘更多的应用场景。由于四足机器人运动性能和开发成本等约束,四足机器人的应用仍然受到限制,因此如何结合国情特点,大胆开拓应用示范,在科研教育、抗灾救险、侦察巡逻、以及太空探索等场合积极探索,也十分必要。四足机器人开发者如何将开发机器人产品与实际应用有机结合也是未来需要考虑的重要问题之一。
浙江大学-南江机器人联合研究中心研制的“赤兔”四足机器人致力于打造国内四足机器人科研和教学的通用化平台,为广大机器人学者和爱好者提供高性价比的机器人开发平台。该平台不仅具备了基本的行走和跑跳功能,还为开发者提供了二次开发编程接口,开发者只需重新编写程序即可体验运动控制所带来的独特魅力。这种方式极大地减轻了研究者在工程量上的时间投入,使得大家可以集中精力研究机器人的运动控制、以及智能感知与控制等算法上,更快地促进我国机器人技术的快速发展。
(作者系浙江大学控制科学与工程学院、工业控制技术国家重点实验室硕士生导师,主要研究领域为腿式机器人、柔性机械手、医疗机器人以及人工智能等。)
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
汽车实用技术(2022年7期)2022-04-20
火力与指挥控制(2021年6期)2021-08-06
房地产导刊(2020年11期)2020-12-28
铁道通信信号(2019年4期)2019-10-10
电子制作(2018年18期)2018-11-14
自动化学报(2018年6期)2018-07-23
知识经济·中国直销(2018年6期)2018-06-29
发明与创新·大科技(2017年7期)2017-07-17
中华骨与关节外科杂志(2016年3期)2016-05-17