
智能球铰链空间磁场分布仿真及其影响分析
2017-03-09 02:45:33杨文国胡鹏浩党学明
中国测试 2017年2期
杨文国,胡鹏浩,党学明
(合肥工业大学仪器科学与光电工程学院,安徽 合肥 230009)
智能球铰链空间磁场分布仿真及其影响分析
杨文国,胡鹏浩,党学明
(合肥工业大学仪器科学与光电工程学院,安徽 合肥 230009)
智能球铰链中球头周边磁场分布对其测量范围和分辨率有直接的影响。该文设计一种新的结构形式,采用多个永磁体和多个磁效应传感器沿球面阵列布置的方案改善测量分辨率,给出其理论模型和新的数值积分算法。Maxwell软件的仿真结果证实理论模型的正确性,并运用理论建模完成相应的理论分析,得出永磁体和传感器的最佳空间位置匹配,对于进一步提高智能球铰链的分辨率和精度有重要意义。
霍尔传感器;球铰链;永磁体;测量分辨率
0 引 言
精密球铰链在并联机构机器人中用途甚广[1-3],在其被动运动过程中,其回转方位及回转角度无法自动获得,为此本课题组提出了一种基于磁效应的智能球铰链:在球头内嵌入永磁体、在球窝内嵌入霍尔传感器阵列,当球头在球窝内转动时,其周边磁场也跟随转动,霍尔传感器阵列获取磁感应强度的变化,然后反算出球头在空间的位姿[4-7]。前期的研究发现采用单个永磁体嵌入球头,样机的测量精度和分辨率很低,且随回转角度变大测量误差增加[8-9]。究其原因是单个永磁体在球头周围产生的磁感应强度偏低,且变化平缓,不利于提高测量精度和分辨率,为此开展了多个永磁体和多个磁效应传感器结合的测量模式,以提高智能球铰链的性能。
1 模型建立
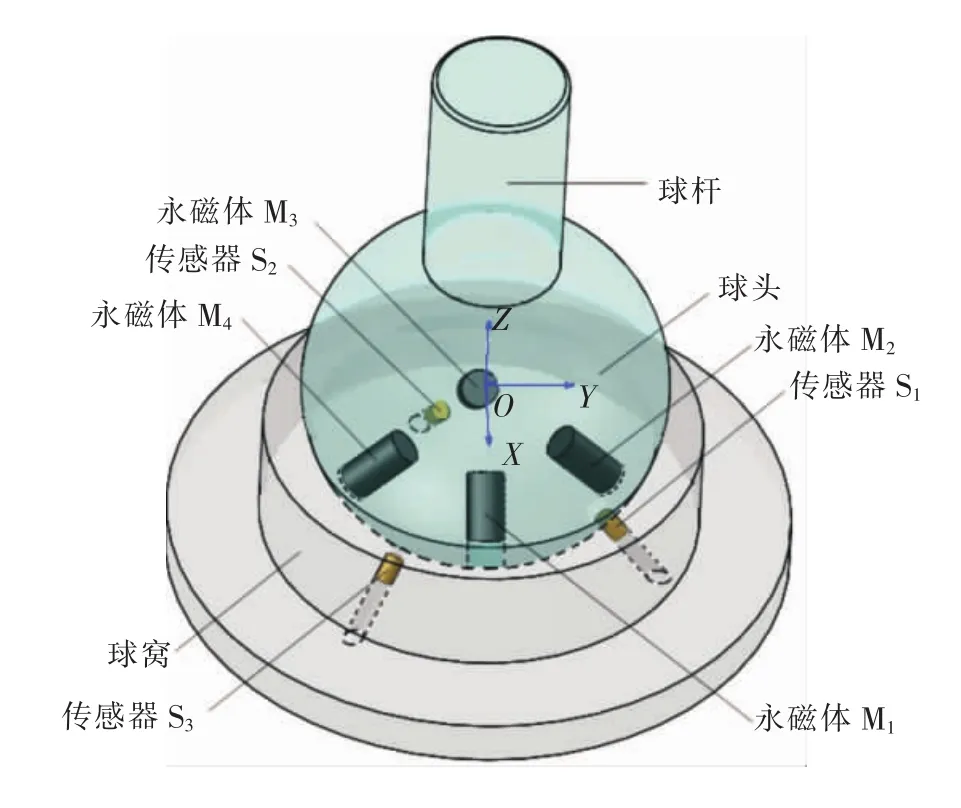
图1 永磁体和传感器空间位置结构图
永磁体阵列和传感器组合模型的空间结构如图1所示,4个同样规格的圆柱永磁体嵌入在球头内、3个霍尔传感器嵌入在球窝中,它们的轴线均穿过球铰链的球心,永磁体M1的轴线在XOZ平面内,俯视XOY平面,从X轴正方向开始逆时针每隔90°分别是永磁体M1、M2、M3和M4,所有永磁体半径为R0,长为L,沿轴向均匀充磁且S极指向球心,N极指向外侧。为避免球头周围磁场出现完全对称现象,永磁体M1的安装半径和其他3个永磁体不同。
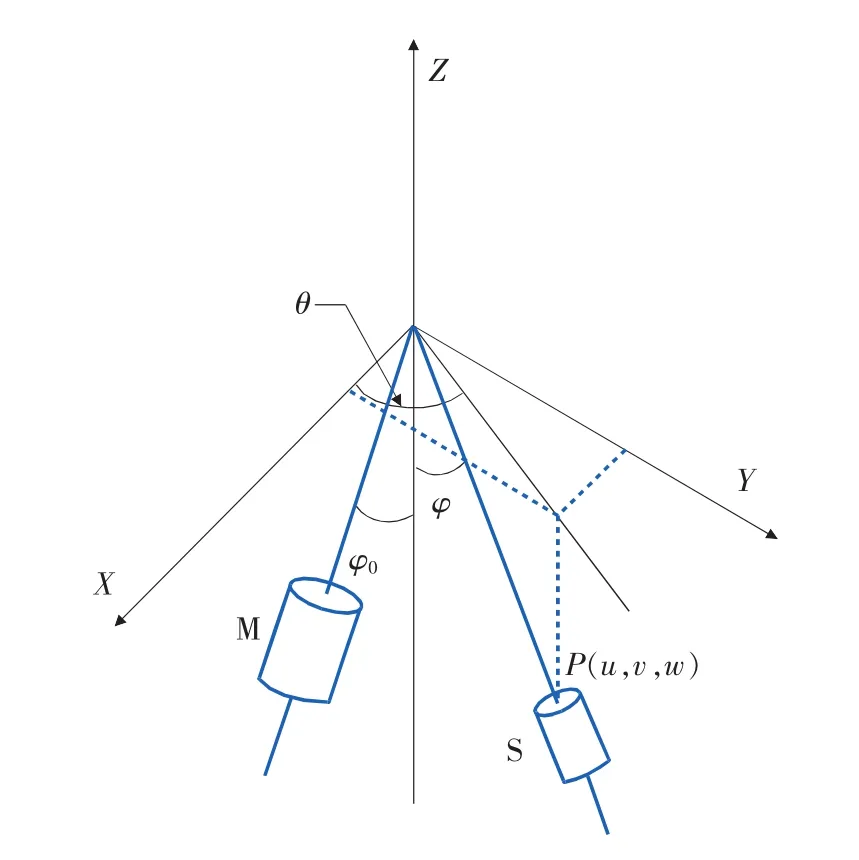
图2 永磁体和传感器空间位置模型图
永磁体和传感器空间位置模型如图2所示,永磁体轴线与坐标轴Z轴负方向夹角为φ0,传感器轴线与Z轴负方向夹角为φ,其在XOY平面上投影与X轴在该平面上沿逆时针方向夹角为θ。
在此采用等效磁荷法计算永磁体周围的磁场[10-11]。以永磁体M1为例,计算其在传感器S所处位置P点的磁感应强度分量Bx1、By1和Bz1,如式(1)~式(3)所示。
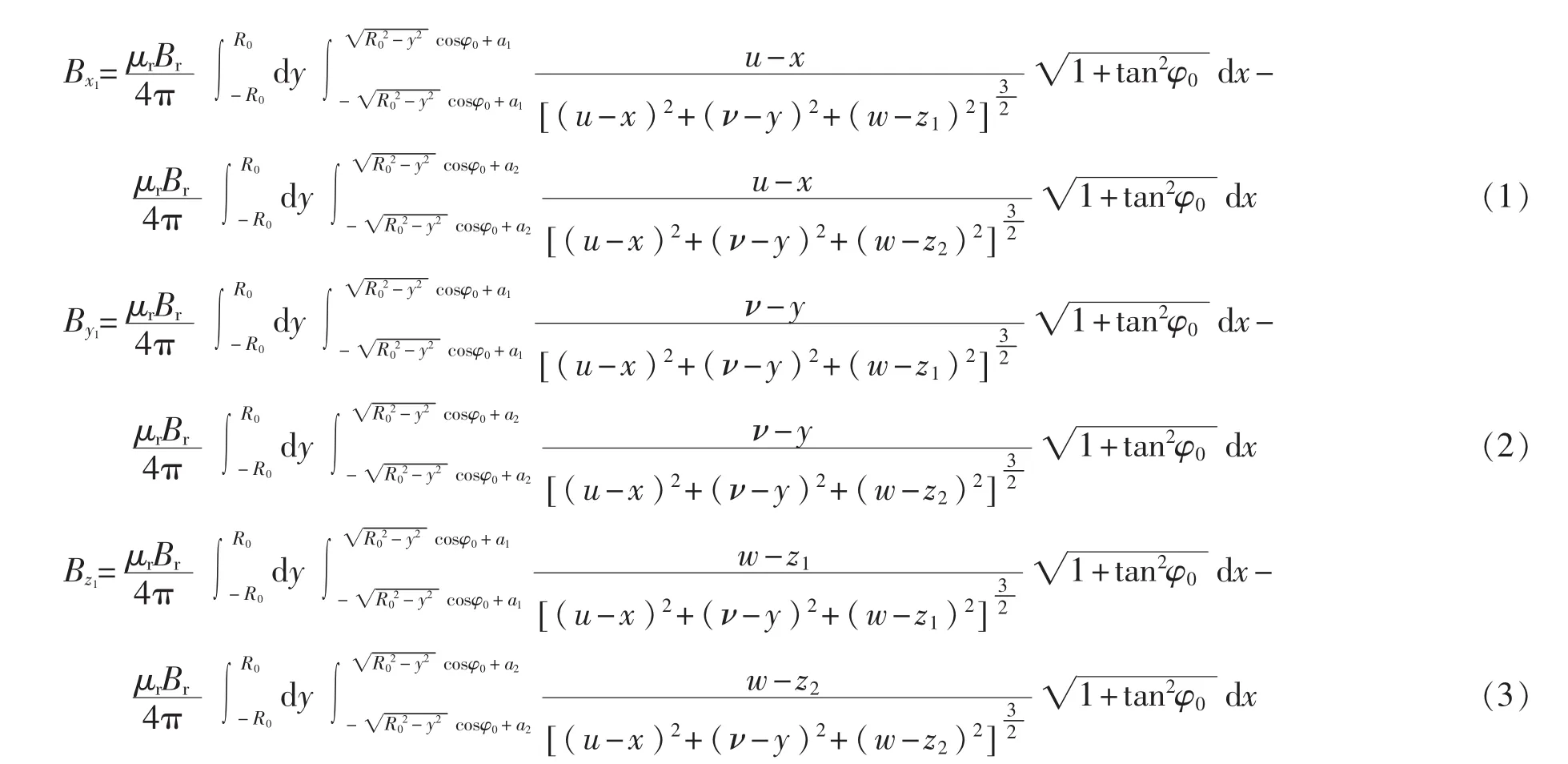
μr——永磁体的相对磁导率;
Br——永磁体的剩磁;
R1、R2——永磁体M1的N、S极端面到原点的距离;
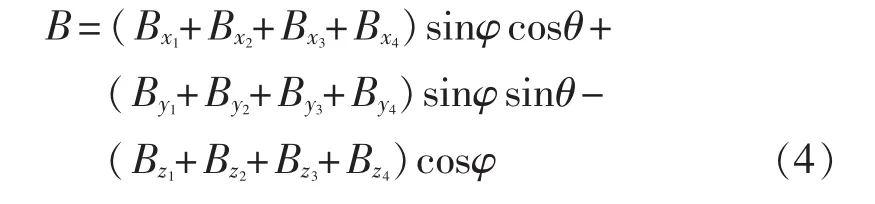
a1、a2——永磁体M1的N、S极端面圆心横坐标。同样的方法可以得到永磁体M2、M3和M4在P点处的磁感应分量Bz4。在4个永磁体同时作用下,P点处的磁感应强度值将会叠加[12-13],霍尔传感器检测到的磁感应强度值是沿球头径向方向的分量,由传感器外指向内为正,反之为负,叠加磁感应强度计算公式为
在采用Matlab积分算法具体计算空间一点沿球面径向方向上的磁感应强度分量时,通过对不同的数值积分算法运算对比,综合考虑积分的精度、计算速度和准确性,选取quadgk函数作为第1积分函数,quadl函数为第2积分函数来完成。
2 Maxwell软件仿真与模型验证
2.1 Maxwell软件仿真模型建立
在此用电磁场软件仿真来验证理论模型的正确性。电磁场常用的数值计算方法主要有时域有限差分法、矩量法和有限元法[14],结合本模型综合考虑,选用Ansoft Maxwell软件进行仿真。所订制的永磁体是烧结钕铁硼N35,半径4 mm,长15 mm,剩磁3.5T,相对磁导率1.1,永磁体轴线与Z轴负方向夹角为30°,要使球头周围磁场变化剧烈,永磁体应尽可能地靠近球面放置,综合考虑球头尺寸(半径为40 mm)以及4个永磁体的装配,确定永磁体M1的S极端面到球心距离为19 mm,其他3个永磁体为24 mm。为了更好地对比 Matlab理论计算值和Maxwell仿真值,在模型外构建了必要的验证线段,所有验证线段的起点均在球头表面上,长度为30mm且沿球头径向放置。
2.2 仿真结果及模型验证
在Maxwell中计算区域的选取对仿真结果有一定影响,通常计算区域取理论模型的3~5倍。取永磁体组边界的4倍作为计算区域边界,通过Maxwell中calculator计算,得到4个永磁体叠加磁场在传感器所在球面(距离球心半径为42mm)法向的磁感应强度值如图3所示,球面上每个小格表示经度10°和纬度5°的角度范围。
从图中可知,传感器所在球面下半球的磁感应强度总体变化明显,呈不对称分布,有利于提高智能球铰链的分辨率。通过Maxwell软件中calculator计算得到所有验证线段上各点的径向磁感应强度分量值和用数学模型经Matlab数值计算的值对比,如图4所示。仿真值和理论值在数值大小和变化趋势上相吻合,说明所改进的模型在理论上是正确的,后续的分析、设计均以此为理论基础。
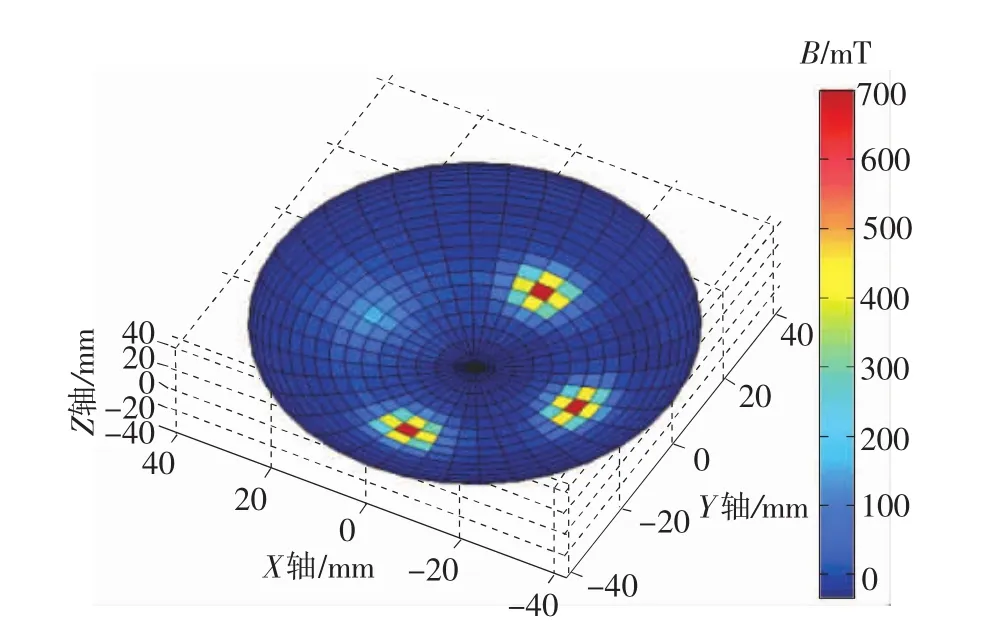
图3 传感器所在球面法向磁感应强度分布图
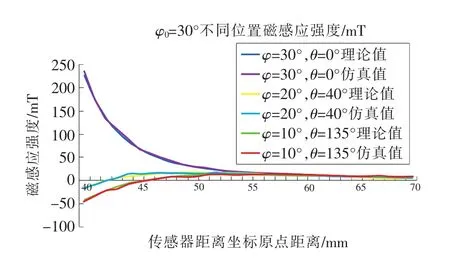
图4 磁感应强度仿真值和理论值
3 永磁体及传感器的最佳空间位置
为满足球头周围磁场变化剧烈和传感器测量范围尽可能大,首先需要确定出该规格永磁体在模型中的最佳摆放位置,在此前提下再确定传感器的最佳摆放位置。Maxwell的仿真值受仿真模型的影响比较大,其计算结果可以用来验证理论模型,但用来探究球头周围的磁场变化却存在不足,使用理论模型计算更准确和方便。在此采用Matlab计算传感器所在球面的法向磁感应强度值,通过对计算结果的观察分析,取传感器不同位置相应角度的磁感应强度值作图,如图5所示。

图5 传感器所在球面上的法向磁感应强度
从图中可以看得出,球面上的磁感应强度在φ0不超过30°范围内、φ从9°到38°的区间中变化比较剧烈,而当φ0为30°时,磁感应强度在φ较小和较大的部分区域内变化却不太明显;当φ0为25°和20°时,磁感应强度在φ较大时变化也不太明显,后者的不明显区域更大一些。由此可知,若使球头周围尽可能大的空间内磁场变化剧烈,φ0应取25°,同理,要使传感器能最大范围的检测到磁场的变化,φ也应取25°。
在φ0取25°的情况下,通过Matlab计算得到半径为42mm、φ在50°范围内的球面上法向磁感应强度值,并作图如图6所示。
图中XY平面上的圆形区域是φ<50°范围内的球面在该平面上的投影,球面上点(0,0,-42)投影即为图中点(0,0),每个小格分别对应球面上经度方向角度差为10°和纬度方向角度差为3°区域,在整个区域内相邻部分的磁场沿轴向和径向变化均比较明显,也就是在φ<50°范围内的球面上的磁感应强度沿经度方向和纬度方向变化较为剧烈,达到了改进模型的目的,同时也证明φ0和φ都取25°是合理的。
4 结束语
1)提出了一种基于永磁体阵列和霍尔传感器阵列的智能球铰链新结构。
2)建立和完善了新结构的理论测量模型,并通过Maxwell软件仿真验证其正确性。
3)为改进的理论模型确立新的数值积分算法,提高了计算效率,为角度实时检测创造了条件。
4)优化了永磁体和传感器的空间位置匹配,确定在一定永磁体剩磁条件下,永磁体和传感器的最佳空间位置匹配。
[1]王海军,王君英.关节间隙对并联机床精度的影响规律研究[J].中国机械工程,2007,18(4):471-474.
[2]TALABA D.The angular capacity of spherical joints used in mechanisms with closed loops and multiple degrees of freedom[J].Roboticsand Computer-Integrated Manufacturing,2012,28(5):637-647.
[3]鲍鑫鑫,胡鹏浩,王静,等.并联机构中精密球铰链的结构和误差特点[J].机械工程与自动化,2013(1):217-218.
[4]刘岩,陈伟海,刘敬猛.可实现三维位置检测的球型电机磁场分析[J].中国测试,2012,38(3):12-16.
[5]汪伟,焦健超,唐力伟,等.基于传感器阵列的振动测试角速度算法研究[J].中国测试,2012,38(4):58-61.
[6]朱福荣,朱红秀,姚欣歆,等.岩石破裂电磁辐射监测系统研制[J].中国测试,2013,39(6):64-67.
[7]胡鹏浩,李帅鹏,赵鹏,等.可实现回转角度测量的球铰链及测量方法:201310502930.2[P].2014-01-22.
[8]李帅鹏.智能球关节的测量原理及关键技术研究[D].合肥:合肥工业大学,2014.
[9]HU P H,WANG L,ZHU L,et al.A measuring method for ball joint spatial rotation angle[J].Sensors and Materials,2015,27(4):341-349.
[10]王春艳,李玉福.基于等效磁荷理论的磁力驱动器磁场计算[J].长春师范大学学报,2015,34(2):15-19.
[11]HUANG R,FENG J.Magnetic field analysis of permanent magnet array for planar motor based on equivalent magnetic charge method[C]∥Proceedings of the 10th World Congress On Intelligent Control and Automa-tion.IEEE,2012:3966-3970.
[12]刘宏娟.矩形永磁体三维磁场空间分布研究[D].北京:北京工业大学,2006.
[13]苟晓凡,杨勇,郑晓静.矩形永磁体磁场分布的解析表达式[J].应用数学和力学,2004,25(3):271-278.
[14]范结义,高成.商用电磁仿真软件的现状与发展[J].电子科技,2011,24(1):121-123.
(编辑:李妮)
Simulation and analysis of influence of magnetic field distribution in intelligent ball hinge
YANG Wenguo,HU Penghao,DANG Xueming
(School of Instrument Science and Opto-electronics Engineering,Hefei University of Technology,Hefei 230009,China)
Magnetic field distribution around ball head directly influences the measurement range and resolution of intelligent ball hinge.An improved intelligent ball hinge structure with several permanent magnets and magnetic effect sensors array around the spherical surface was proposed,which could be beneficial to the measuring resolution,the theory model was offered and followed by a new numerical integral algorithm.The validity of the theoretical analysis had been verified by Maxwell software simulation.After the corresponding theoretical analysis with theoretical model,the optimal spatial position matching of the permanent magnets and sensors was put forward,the result had important significance in improving the resolution.
Hall sensor;ball hinge;permanent magnet;measurement resolution
A
:1674-5124(2017)02-0130-04
10.11857/j.issn.1674-5124.2017.02.026
2016-05-10;
:2016-06-18
国家自然科学基金项目(51475133)安徽省自然科学基金项目(1508085MF122)
杨文国(1992-),男,河南洛阳市人,硕士研究生,专业方向为测试计量技术与仪器。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:07:00
中学生数理化·自主招生(2022年11期)2022-05-30 00:07:26
计量学报(2020年7期)2020-08-07 02:55:36
民用飞机设计与研究(2019年2期)2019-08-05 01:33:44
汽车实用技术(2019年7期)2019-04-18 07:55:52
北京汽车(2019年6期)2019-02-12 05:19:50
汽车电器(2018年10期)2018-11-01 01:17:26
电气化铁道(2016年2期)2016-05-17 03:42:34
哈尔滨师范大学自然科学学报(2014年5期)2014-10-24 10:17:58
CHIP新电脑(2014年5期)2014-05-14 20:54:03
