基于DSP的PMSM矢量控制的优化设计与实现
2016-11-29 09:43:53王新君巫庆辉申庆欢
微特电机 2016年3期
王新君,巫庆辉,申庆欢
(渤海大学,锦州 121013)
基于DSP的PMSM矢量控制的优化设计与实现
王新君,巫庆辉,申庆欢
(渤海大学,锦州 121013)
设计了基于DSP2812永磁同步电动机(PMSM)矢量控制系统,采用高性能的霍尔电流传感器采集电流信号、隔离电压传感器采集母线电压信号的措施对硬件进行了优化设计,提高了硬件的效率,另外,采用片外高精度AD7606提高A/D转换精度。在软件上,根据有无霍尔信号提出了矢量控制中扇区的混合计算方法,提高了扇区判断的准确性与可靠性;另外,又将算法分为实时算法和非实时算法,在实时算法中使用IQmath函数库提高算法运算速度,提高了控制的实时性。通过MATLAB仿真及试验验证了系统良好的运行效果。
数字信号处理器;矢量控制;空间电压脉宽调制;永磁同步电动机;优化设计
0 引 言
近年来,随着电力电子技术、微电子技术、新型电机控制理论,稀土永磁材料的快速发展,永磁同步电动机(以下简称PMSM)被广泛的应用在工业控制领域[1]。由于其转子不需外部励磁,因此具有体积小、重量轻、运行效率高、动态性能好、调速范围宽等优点[3-6]。本文从实际应用出发,通过对硬件电路和软件算法的优化设计,实现了对PMSM高精度、高动态性能控制。随着数控机床、机器人等领域对伺服驱动器性能要求不断提高,PMSM高性能控制系统逐渐成为交流伺服传动系统的主流[7-10]。
1 PMSM矢量控制系统
PMSM矢量控制系统结构框图如图1所示,其控制思想是设法在三相交流电动机上模拟出直流电动机转矩控制的规律,通过坐标变换、磁场定向的方法将定子电流分解为励磁电流分量与转矩电流分量,并且两个分量互相垂直,相互独立,从而实现解耦控制[13-15]。由图1可知,系统采用id=0控制,通过检测定子电流与转子位置,可以得到实际id,iq的大小,通过速度、电流PI双闭环调节实现对PMSM的转速控制[11]。由dq坐标系下电磁转矩方程:
Te=pφriq
此时电机的电磁转矩正比于iq的大小,它具有和直流电动机一样的控制特性。
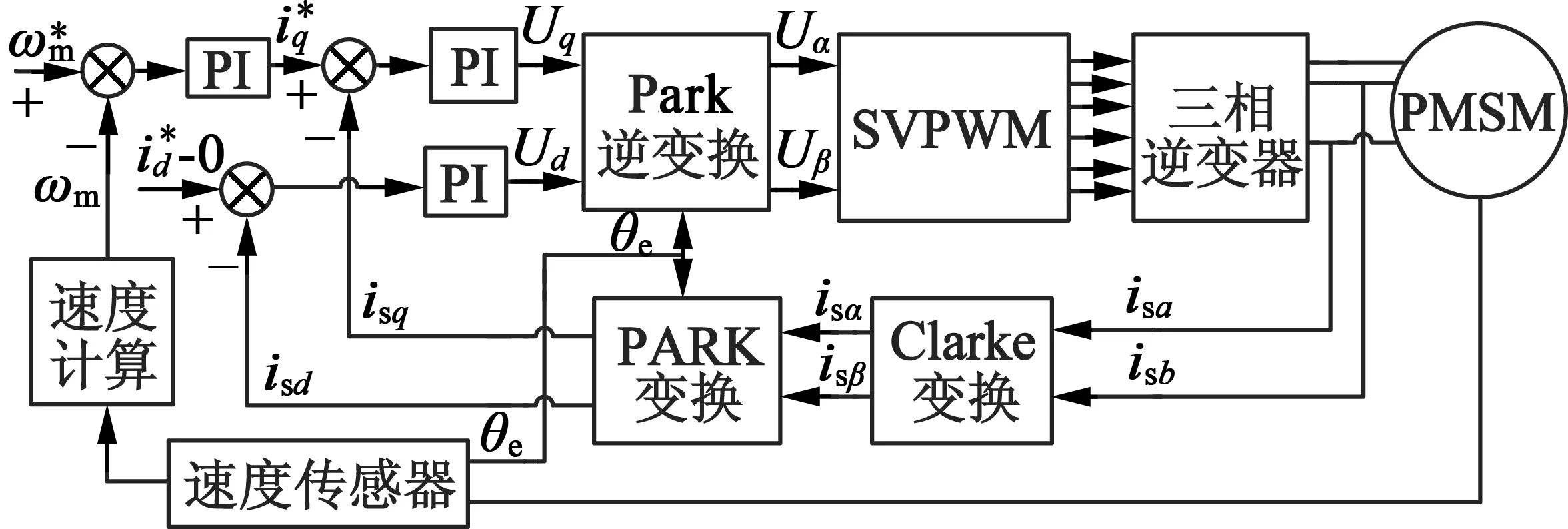
图1 PMSM矢量控制系统结构框图
2 系统硬件设计
本文的PMSM矢量控制系统主要由TMS320-F2812控制芯片、IPM智能功率模块、整流桥、稳压电容、光耦芯片、PMSM组成,硬件电路结构图如图2所示。

图2 硬件结构框图
2.1 电流采样电路
为了提高检测电流的准确性和可靠性,采用霍尔传感器CS040GT对U,W两相电流进行采集,采集电流范围-80~80 A,并对电流信号滤波隔离,减少高频信号干扰。U相霍尔电流传感器检测电路及隔离电路分别如图3和图4所示。

图3 U相电流检测电路
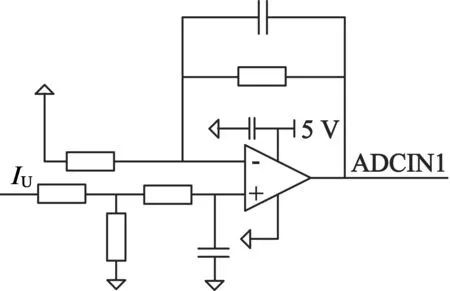
图4 U相电流隔离滤波
2.2 片外A/D转换电路
为了提高电流、电压计算精度,本文采用ADI高性能同步模数转换芯片AD7606,分辨率达到16位,采用单电源5 V工作方式,具有片内滤波和高输入阻抗,可以实现8路高精度同步采样,保证了矢量控制的准确性。
2.3 母线电压采集电路
DSP将实时检测母线电压的大小,为了提高系统的可靠性,采用HCNR200光耦隔离器实现电压的采集,隔离后的电压信号经滤波后送入AD7606的ADCIN5接口,母线电压采集电路如图6所示。
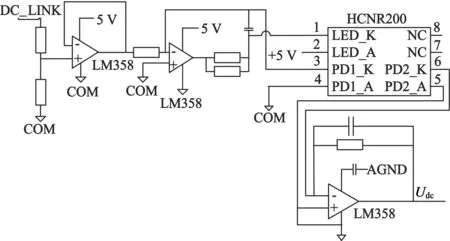
图6 母线电压采集电路
2.4 信号接口电路
硬件设计了多种编码器信号接口,支持差分光电增量编码器信号、差分霍尔信号、单端霍尔信号、位置脉冲指令信号。其中输入的差分信号经AM26LS32转换成单输出信号供DSP采集,如图7所示。
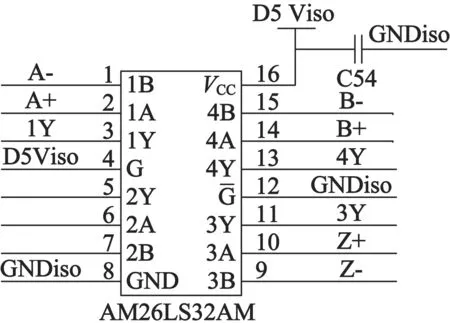
图7 编码器接口电路
3 系统软件设计
系统软件设计采用C语言编写,由于矢量控制程序对数据处理的速度和精度要求非常高,因此使用IQmath函数库进行数据运算[2],数据格式为_IQ15,并对数据进行标幺化处理,合理分配运算单元,同时根据电机有无霍尔信号线改进了扇区的计算方法。
3.1 程序流程图
程序流程图如图8所示,主要包括程序的初始化、主程序和中断程序等。初始化程序的作用是对系统和用户的参数进行初始设置,保证各部分功能正确工作。
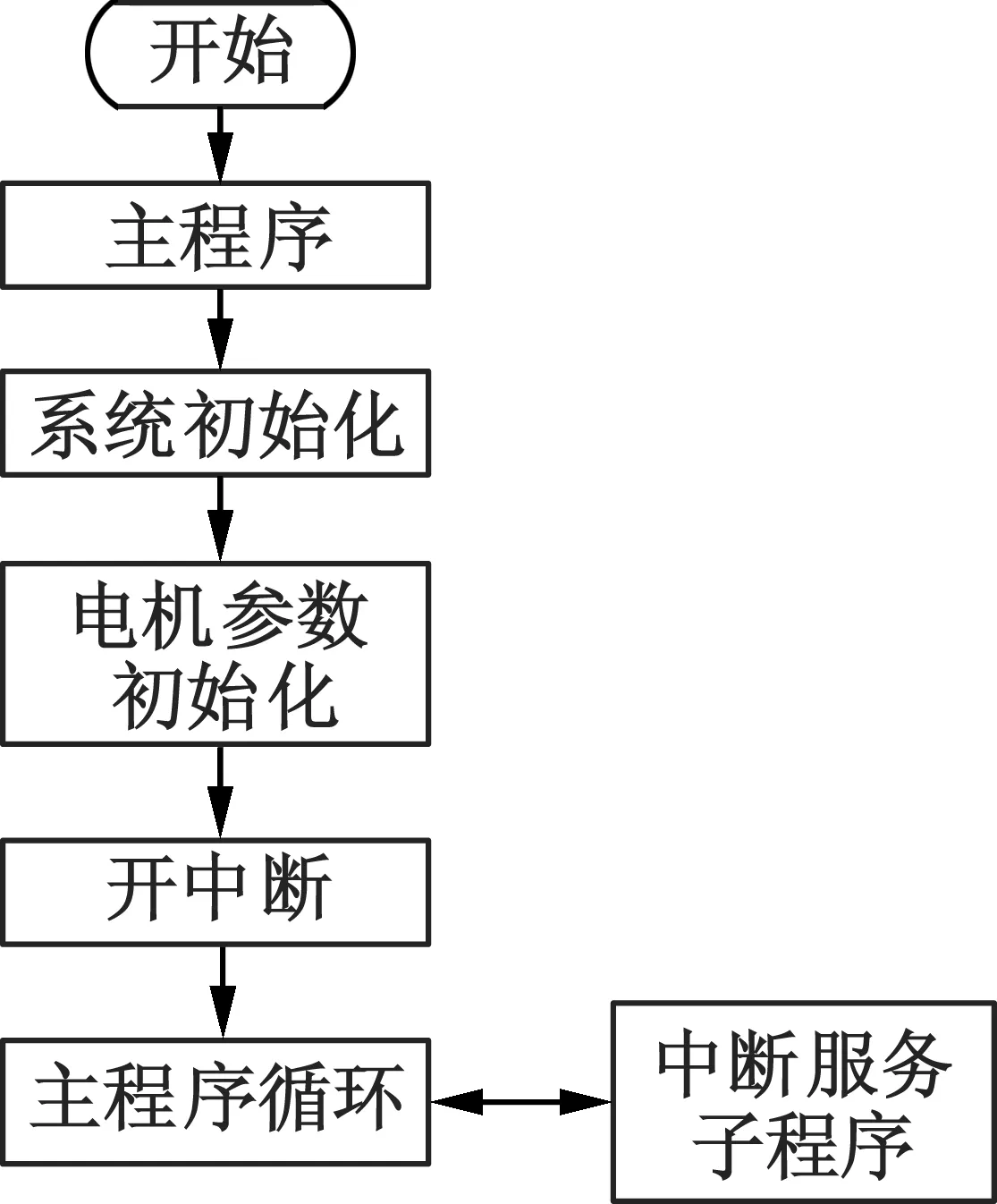
图8 程序流程图
3.2 下溢中断程序
定时器1的下溢中断完成了对U,W两相电流的检测,转子初始位置的定位[12],电机转速的计算,对检测电流进行Clarke变换,Park变换,id,iq电流环计算,速度环计算,逆Park变换,SVPWM的产生,PWM信号生成等。程序流程图如图9所示。
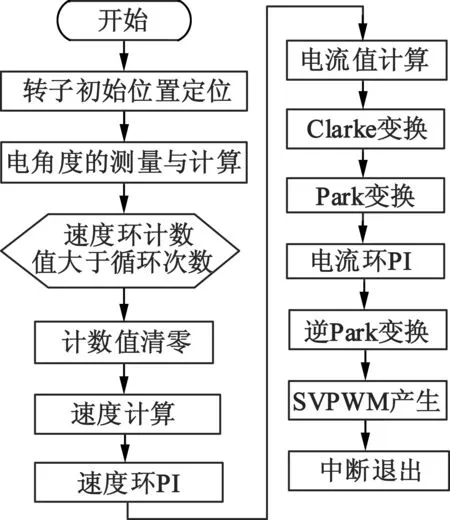
图9 下溢中断程序流程图
3.3 SVPWM产生
在SVPWM算法中,根据电机有无霍尔信号改进了扇区的判断方法,提出了矢量控制扇区的混合计算方法,提高了扇区判断的准确性和可靠性。程序流程图如图10所示。

图10 SVPWM合成流程图
4 仿真结果
在MATLAB的Simulink模块建立PMSM矢量控制仿真模型,仿真结果如图11、图12所示。由图11、图12知,电机起动时相电流很大,电磁转矩达到最大值,与之对应的是转速迅速上升,在0.02 s时达到给定转速250 rad/s,此时电磁转矩与定子三相电流也基本达到稳态。之后在负载转矩由5 N·m增加到10 N·m时,转速略有下降,定子电流增加,电磁转矩增加到10 N·m,转速运行平稳。

(a) A相电流波形
(b) B相电流波形

(a) 转速
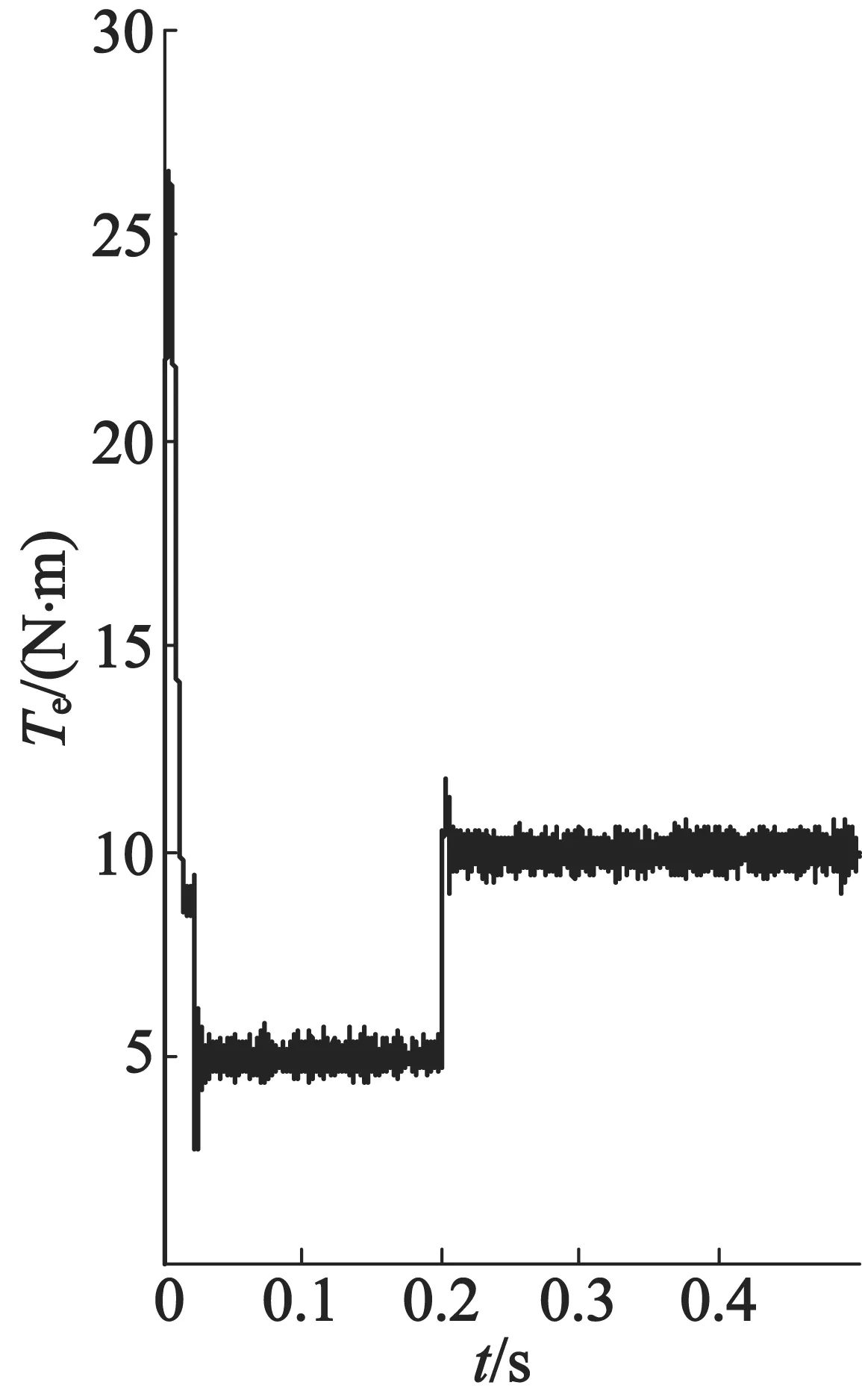
(b) 电磁转矩
5 实验结果
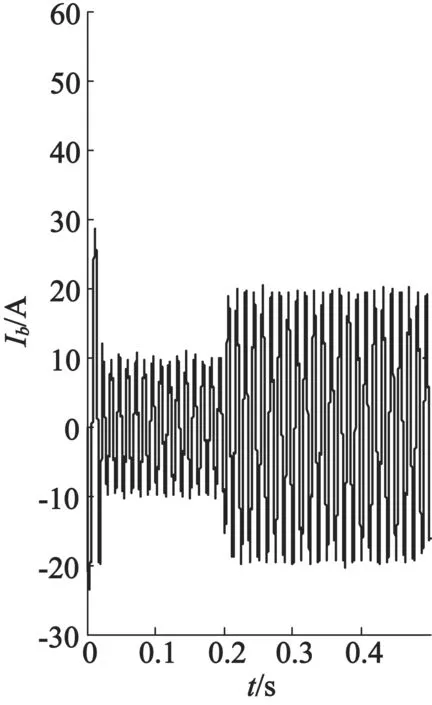
图13为PMSM矢量控制硬件设计实物图,电机为DBL032PMSM,电机参数如表1所示。通过实际运行,在转速、电流双闭环调节下,经示波器检测定子两相电流波形,结果如图14所示,电流波形变化
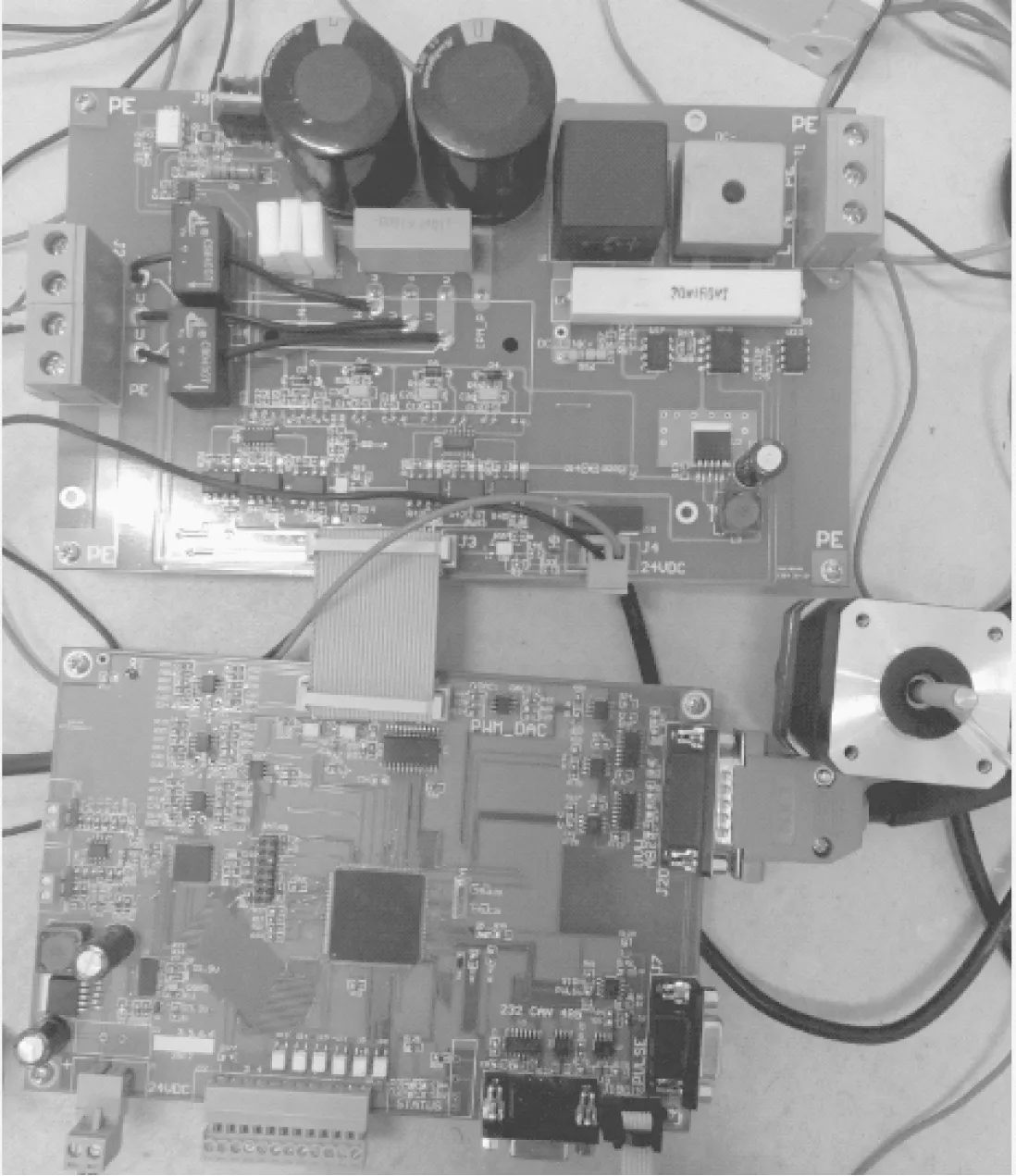
图13 硬件实物图
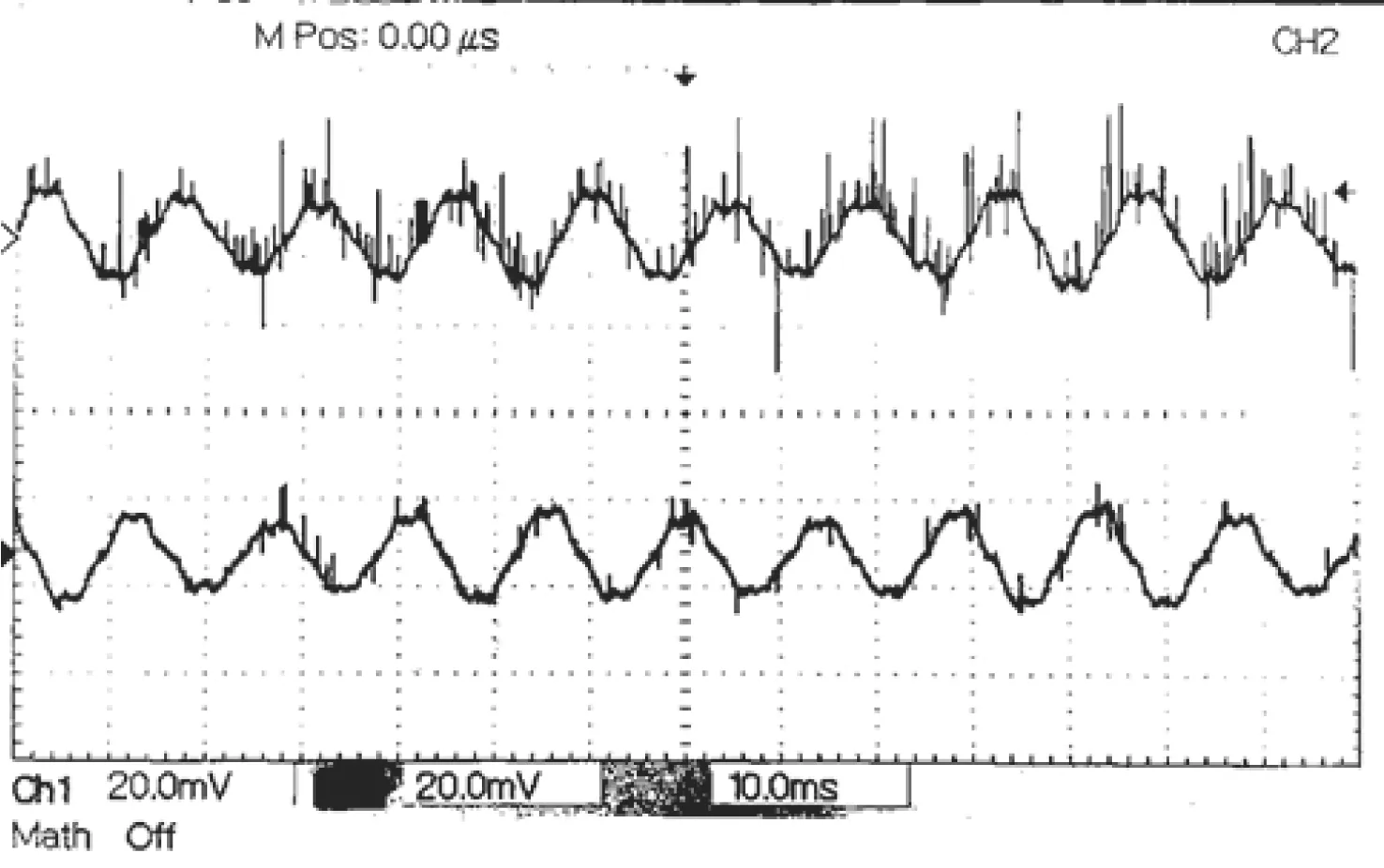
图14 定子U,V两相电流波形
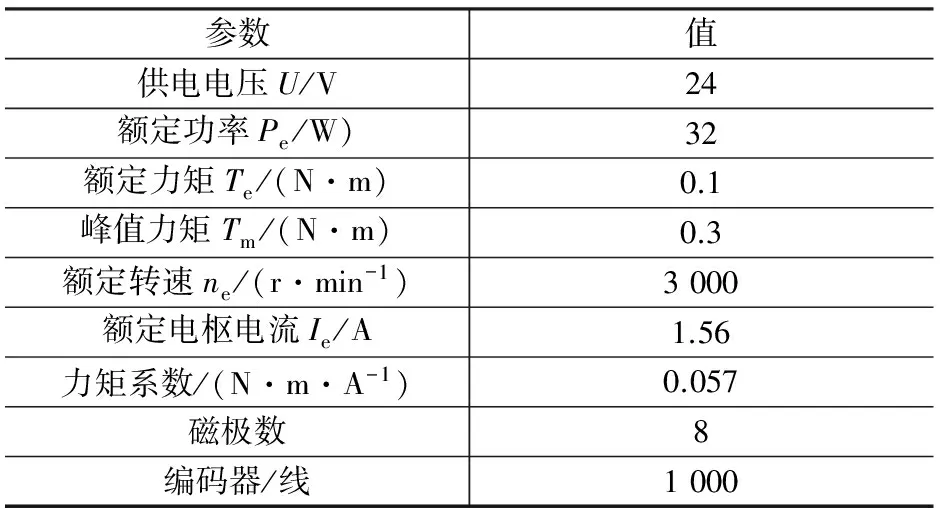
参数值供电电压U/V24额定功率Pe/W)32额定力矩Te/(N·m)0.1峰值力矩Tm/(N·m)0.3额定转速ne/(r·min-1)3000额定电枢电流Ie/A1.56力矩系数/(N·m·A-1)0.057磁极数8编码器/线1000
平稳,电流的正弦性较好,系统可以稳定运行,证明硬件和软件设计的正确性。
6 结 语
本文从硬件和软件方面对PMSM矢量控制系统进行了优化设计,提高了系统的可靠性和控制精度,通过仿真和实际运行验证了该闭环系统具有启动快,响应快,运行稳定的特点,系统获得了良好的控制效果。
[1] 任志斌.电动机的DSP控制技术与实践[M].1版.北京:中国电力出版社,2012:172-181.
[2] 苏奎峰.TMS320X281x DSP原理及C程序开发[M].2版.北京:北京航空航天出版社,2011:186-224.
[3] 王桂荣,李太峰.基于DSP的PMSM矢量控制系统的设计与研究[J].电力电子技术,2012,46(2):114-116.
[4] 宋雪雷,王永兴.基于DSP的PMSM控制器设计及相关问题分析[J].电力电子技术,2010,44(7): 33-34.
[5] 周霞.基于DSP的永磁同步电机无位置传感器控制方法[J].电源技术,2012,36(5): 740-743.
[6] 卢铁斌,李春江,章跃进,等.基于DSP的永磁同步电机伺服系统矢量控制研究[J].微电机,2010,43(12): 34-38.
[7] 舒志兵,翟正磊,章杰,等.基于滑模观测器的PMSM无传感器控制[J].电气传动,2012,42(11): 7-10.
[8] 周锋,粟梅,孙尧,等.基于滑模控制的TSMC-PMSM调速系统[J].电力电子技术,2012,46(8): 93-96.
[9] 王桂荣,李太峰.基于TMS320F2812的PMSM调速控制系统设计与分析[J].机床与液压,2012,40(15):87-90.
[10] SHEN F,ZHANG M Q,YAN Z Y,et al.Design of the PMSM servo upper controller system based on DSP and VC ++[J].Journal of the Suzhou University,2012,32(3):45-50.
[11] DEMIRTAS M,KARAOGLAN A D.Optimization of PI parameters for DSP-based permanent magnet brushless motor drive using response surface methodology[J].Energy Conversion and Management,2012,56(2):104-111.
[12] 韩利,姚宏,武将,等.电压矢量定向的PMSM转子初始位置测量方法及应用[J].微特电机,2012,40(7):15-18.
[13] LIU K,ZHU Z Q.Parameter estimation for condition monitoring of PMSM stator winding and rotor permanent magnets[J].IEEE Transactions on Industrial Electronics,2013,60(12):5902-5913
[14] 陈亚东.基于DSP的永磁同步电机伺服系统的研究与设计[D].成都:西南交通大学,2014.
[15] 毛文杰.基于DSP的PMSM伺服系统设计[D].杭州:浙江大学,2013.
Optimal Design and Implementation of Vector Control for PMSM Based on DSP
WANG Xin-jun,WU Qing-hui,SHEN Qing-huan
(Bohai University,Jinzhou 121013,China)
In this paper, a vector control system of permanent magnet synchronous motor (PMSM) was designed based on DSP2812. In hardware, the optimal design methods were adopted to improve the efficiency of hardware by using high performance Hall current sensor to collect current signal, using isolated voltage sensor to collect busbar voltage signal. In addition, a high precision AD7606 was utilized to improve A/D conversion accuracy. In software, a mixed calculation method of sector in vector control was put forward according to the presence of Hall signal, resulting in the better accuracy and reliability of the sector judgment. In addition, the algorithm was divided into real-time algorithm and non real time algorithm. In the real-time algorithm, the IQmath function library was applied to improve the running speed of the algorithm, and increase the real-time of the control. A good running effect of the system was verified by MATLAB simulation and actual operation.
DSP; Vector control; SVPWM; PMSM; optimal design
2015-06-26
辽宁省教育厅一般项目(L2012402);渤海大学教学改革项目(YG13YB011)
TM341;TM351
A
1004-7018(2016)03-0062-03
猜你喜欢
防爆电机(2023年6期)2023-11-30 03:05:28
南北桥(2022年2期)2022-05-31 04:28:07
新型工业化(2021年8期)2021-10-23 10:27:10
电子与封装(2021年7期)2021-07-29 10:58:48
电脑知识与技术·经验技巧(2017年9期)2018-02-24 19:55:20
河南科技(2016年8期)2016-09-03 08:08:22
河南科技(2016年6期)2016-08-13 08:18:29
西南交通大学学报(2016年4期)2016-06-15 20:29:36
计算机技术与发展(2016年10期)2016-02-27 00:44:08
浙江共产党员(2014年12期)2014-07-10 03:30:06