压电微传动电机发展综述
2016-11-29 09:43:57许立忠高立超贺晓东
微特电机 2016年3期
李 冲,许立忠,高立超,贺晓东
(燕山大学,秦皇岛 066004)
压电微传动电机发展综述
李 冲,许立忠,高立超,贺晓东
(燕山大学,秦皇岛 066004)
介绍了压电微电机的特点及在尖端技术领域的应用前景,根据定转子间的接触形式给出了压电微传动电机的分类,详述了各类压电微电机国内外的研究现状。针对各类压电微电机的优缺点,分析了各类压电微电机的应用范围。以一类电磁式非接触压电电机为例,指出了压电微电机的发展趋势及未来广泛的应用前景。
压电微电机;研究现状;发展趋势;应用领域
0 引 言
随着航空航天、精密加工技术的不断发展以及电子和控制技术向机械领域的不断渗透,跨学科、跨领域,集机械、电气与控制于一体的新型复合传动成为微型机械科学领域的国际性前沿课题[1]。其中利用压电陶瓷材料作驱动的各类微型传动电机因具有控制方便、频率响应快、位移分辨率高、无噪声、无电磁干扰、低电压驱动及易于微型化的优点成为研究的热点[2-4]。
压电电机利用压电材料的逆压电效应,将电能转化为机械能。目前,各种不同类型的压电电机已成功应用于精密定位平台、微型机器人、月球探测器等尖端技术领域。根据定转子间的接触类型,可将压电微传动电机分为三类,即摩擦式压电微电机、非接触式压电微电机和点接触式压电微电机。本文在总结压电微电机研究现状及分类的基础上,给出未来压电微电机的发展方向,为压电电机的广泛应用提供一定借鉴。
1 压电微电机研究现状
压电电机从提出到现在已经走过了几十年的历程,但仅仅在近20多年来,压电电机才真正从理论过渡到应用阶段。压电电机最初由苏联专家最先提出,1964年基辅理工学院的V. Vlavrinenko设计了第一台旋转压电电机[5]。日本对压电电机研究较早,成果较多,最早将压电电机推向实用化发展阶段。压电电机的发展主要经历了四个阶段,分别是基础研究阶段、专利申请阶段、产品研制阶段和工业应用阶段,如图1所示[6]。20世纪60、70年代,压电电机处于基础研究阶段,各国学者纷纷投入到压电电机的研究工作中;80年代左右,科研工作者取得初步成果,并将成果以专利的形式保护起来;80年代中后期,科研单位和企业纷纷投入到压电电机的应用研制阶段;90年代以后,大量压电电机已经投入到工业应用中。目前,压电电机产业发展最好的国家是日本,佳能、松下、丰田等公司分别将压电电机应用在相机调焦系统、家用电器、汽车转向系统中[7]。此外,压电电机在航空、精密定位、机器人等领域发展迅速,麻省理工学院研制的双面齿压电超声电机已经应用于火星探测器操纵臂关节驱动中;压电电机具有响应快的优点,使得其能够迅速起动和停止,适合应用于高精密定位。由于压电电机没有噪声,在办公室、图书馆、家庭、宾馆、医院等对环境要求较安静的场所,可使用压电超声电机为窗帘机提供驱动,达到保持室内安静、减小噪声的效果。

图1 压电电机发展历程
我国在20世纪80年代中后期开始接触和研究压电电机,南京航空航天大学、清华大学、吉林大学、天津大学等高校率先研制出各种类型的压电超声电机样机[8-9]。在压电电机实用化进程中,南京航空航天大学和清华大学走在了时代的前列,先后将压电电机应用于家用电器、医用设备、航天探测器等领域。据不完全统计,目前在国内开展压电电机、压电驱动器研究的高校及研究所已经高达上百所,各具特色的压电微电机被设计和研制出来。虽然国内压电微电机已经获得应用,但是其应用领域还不够广泛,与日本、美国等世界先进技术国家相比还有很长路要走。
2 压电微电机分类
2.1 摩擦式压电微电机
摩擦式压电微传动电机是最早出现、最早被应用到工程实际中的一类压电电机,其典型代表的就是压电超声电机在世界范围内的广泛使用。日本是最初将压电电机推向商业应用的国家,其拥有目前世界上一半以上压电超声电机的发明专利[10-11]。早在1972年,日本著名的松下电器公司将自主研发的具有商业应用前景的压电超声电机申请了专利[12],该电机同时也是世界上第一个拥有专利的压电超声电机。1980年,日本指田年生设计和制造出第一台驻波型兰杰文振子结构的压电超声电机[13],该电机的研制第一次符合工程实用的条件。与此同时,前苏联学者Vasiliev等[14]在1981年设计出一种能够驱动较大负载的压电电机,该电机后来成为最早被实际使用的压电电机。1987年,日本佳能相机公司将研发的环状行波型压电超声电机成功配备于EOS相机的自动调焦系统中[15],标志着压电超声电机正式迈向商业实用化的队列。1996年,日本东京大学Takeshi Morita等[16]设计和制造出薄膜沉积式柱状弯曲型超声电机,当给该电机施加106 kHz的激励频率时,此电机的空载转速和堵转转矩分别达到880 r/min和7 μN·m。
进入21世纪,压电电机的研究在世界范围内获得迅猛发展。2002年,宾夕法尼亚州立大学的学者Burhanettin Koc[17]研制出一种采用金属柱体弯曲振动模态的单相驱动微型压电超声电机,后来该电机被韩国三星公司成功应用于手机相机的调焦系统中。2005年,日本学者T. Kanda等[18]先后研制出一系列利用单转子轴作为输出装置的管状压电超声电机,并对该电机的定转子在不同接触角时的输出特性进行了研究。2013年,日本Tomoaki Mashimo[19]研制出一台定子体积仅为1 mm3的压电超声电机,该电机能产生0.013 μN·m的转矩。
尽管海外学者对摩擦式压电微电机做出了显著成果,然而国内高校和科研机构近年来也对此种微电机进行了深入探索。1989年,清华大学周铁英和董蜀湘申请了中国首个自主研发的压电微动电机专利[20]。1995年,南京航空航天大学赵淳生团队研制出首台环形压电行波超声电机[21],该电机具有广阔的市场前景,经优化后被用于驱动电动窗帘。1996年,哈尔滨工业大学江溯和孙立宁等设计了一种内置角位移传感器的压电旋转型驱动电机[22]。1997年,清华大学董蜀湘等设计和制造出弯曲型压电超声电机[23],试验测得该电机的最大转矩为55 mN·m,在激光谐振腔的微调器中获得成功应用。此外,清华大学周铁英科研团队于2004年成功研制出当时最细微直径仅1 mm的微型压电超声电机[24],该电机最大堵转转矩和最高转速分别为4 μN·m和1 800 r/min,在医学OCT内窥镜中体现了商业价值。2014年,哈尔滨工业大学陈维山等设计出一种定子具有“三明治”结构的新型行波压电超声电机[25],当给电机施加100 V的激励电压时,电机的无负载最大转速为2.23 r/min,最大输出转矩为0.15 N·m。
2.2 非接触式压电微电机
非接触式压电微电机独特之处在于定转子间分离或者通过一定介质隔开。根据驱动力的来源,可将非接触式压电微电机分为基于声辐射压力型、基于声流型和基于声辐射压力和声粘性力的混合型。早在1990年,日本中村健太郎、上羽贞行等人就研制出以液体为媒介的非接触型压电超声波电机[26]。1995年日本学者山崎藤吾等人研制一种驱动频率为26 kHz的圆筒型非接触超声波电机[27],该电机的最高转速为3 000 r/min。与此同时,K. Nakamura等人利用电流变作为定转子间的介质研制了一种扭转振动的非接触式压电超声电机[28]。2011年,白俄罗斯学者D.A. Stepanenko等设计了一种由环形定子和刀片状转子构成的非接触式压电电机[29],电机转子通过接收声辐射的能量产生转动。
21世纪以来,国内非接触式压电传动微电机的研究进入快速发展时期,吉林大学、清华大学、南京航空航天大学等高校都涌现出众多成果。赵淳生团队提出一种筒型非接触式压电超声电机[30],电机主要由筒状的定子和转子组成,最大转速和堵转转矩分别达到2 100 r/min和13 μN·m。鄂世举等[31]通过试验和分析非接触式压电电机的结构,对非对称波驱动原理进行了验证,找出了非对称波型非接触式压电电机的激励频率,给出了激励电压与样机转速间的关系。陈超等[32]提出了一种由球形转子构成的非接触式压电电机,该电机通过压电陶瓷激励碗状定子产生两相驻波且合并成一处强行波,进而诱发高声强声场来同时悬浮和驱动球形转子,在激励电压为300 V时,电机转速为521 r/min。邱伟等人研发了一种通过巨电流变流体控制扭转振子的非接触式旋转压电电机[33],该电机激励频率为118 Hz,最高转矩和转速分别达到1.04 mN·m和6.98 rad/s。
2.3 点接触式压电微电机
将定转子间通过点接触的形式传递运动的压电电机归为点接触式压电微电机。点接触式压电微电机最经典的方案就是将压电驱动与谐波传动实现有机结合。压电谐波电机最早由学者Hamaguchi[34]提出。2000年,德国学者Oliver Barth设计并制造出一种小型伺服电机即压电谐波电机[35],如图2所示,该电机以压电力控制柔轮和刚轮啮合,实现了驱动、控制和传动的结构集成,使整个机电系统的结构尺寸进一步减小,该电机的堵转转矩为0.75 N·m。2004年,中国辛洪兵等利用8个压电叠堆和位移放大机构设计了一种压电谐波电机[36]。2014年,李霞等提出一种新型压电换能器式波发生器驱动的压电谐波电机[37],该电机利用沿柔轮内圆圆周均匀分布6组压电换能器和位移放大机构来实现能量的传递。
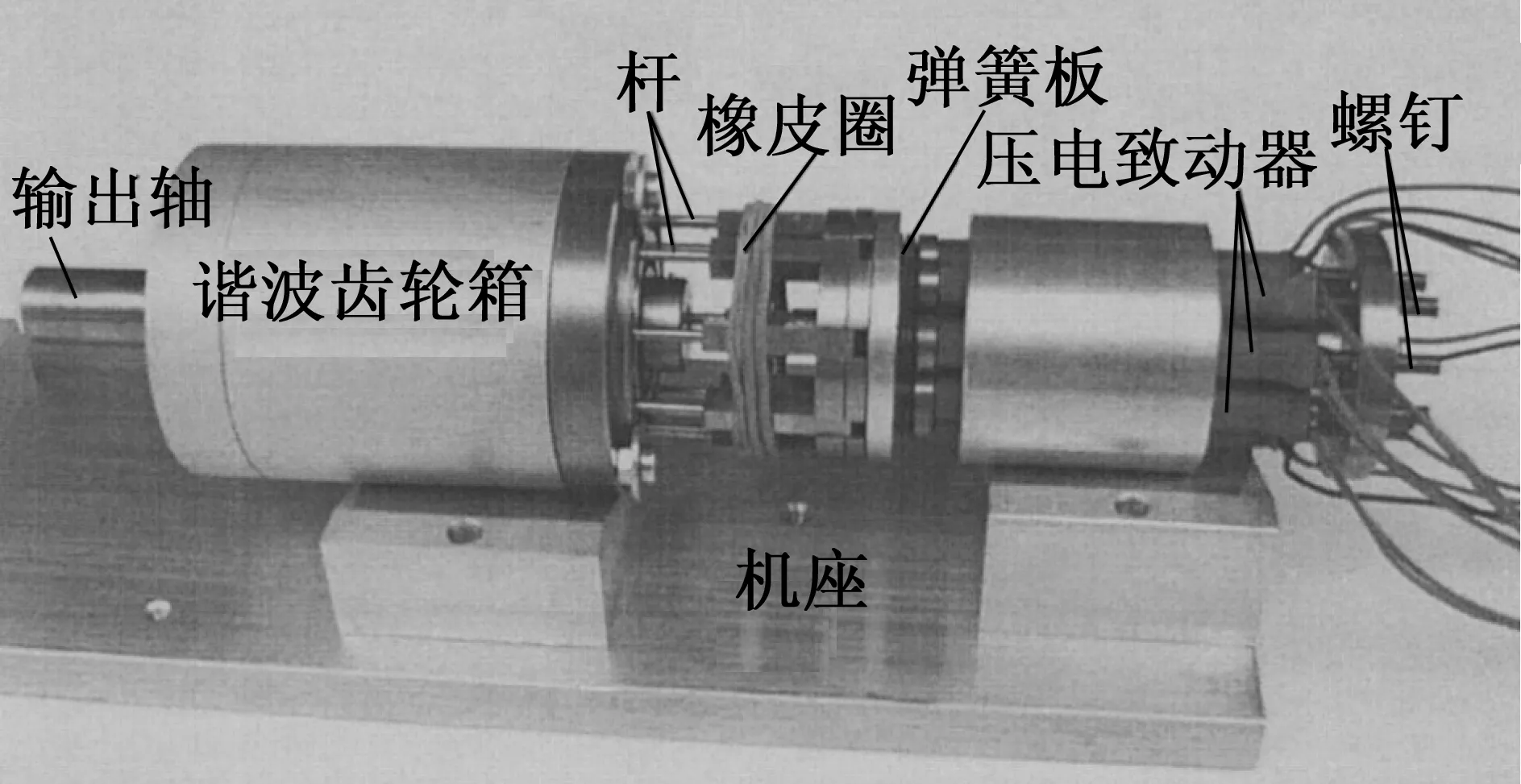
图2 压电谐波电机
许立忠等[38]提出一种机电集成压电谐波传动电机,如图3所示。该电机将压电驱动、谐波传动、活齿传动集成于一体,具有低速、大转矩等特性。电机工作时,给两个相互垂直方向的压电叠堆通入相位差为90°的余弦信号后,两压电叠堆在激励作用下进行伸缩变形,通过位移放大机构的作用,两方向的变形量在波发生器边缘处形成连续谐波,谐波推动活齿移动,进而输出运动。

(a) 样机

(b) 工作原理
3 不同类型比较及发展趋势
3.1 不同类型压电微电机比较
表1给出了各种类型的压电微电机的比较,通过比较可以看出,各种压电微电机各有优缺点,而且不同类型的电机可用于不同的场合。摩擦式压电微电机适合用在对输出转矩要求较大且对传动比要求不是很高的场合;非接触式压电微电机适合应用在对输出转矩要求较小的场合,且非接触式压电微电机具有较长的寿命;点接触式压电微电机适合应用在既对输出转矩要求较高,又对输出转速要求较低的情况下。
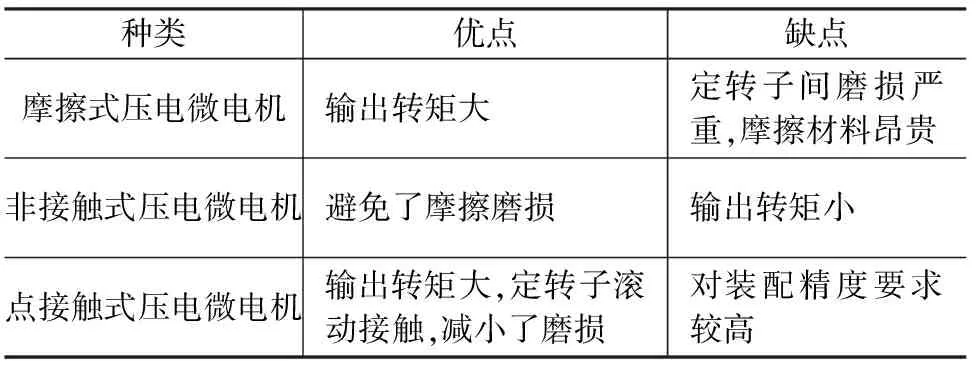
表1 各种压电微电机比较
3.2 未来压电微电机发展趋势
目前,各类压电微电机已经成功应用于工程实际和航空尖端技术领域。2013年,南京航空航天大学赵淳生科研团队[39]将研发的直径30 mm、重量仅为46 g的TRUM-30A型压电超声电机首次用于“嫦娥三号”探测器,协助探测器在月球表面实现完美着陆。
在未来对压电电机研究中,各类跨学科、跨领域的压电微电机将成为研究热点。2015年,邢继春等将压电与电磁结合,设计了一种基于电磁夹持非接触式旋转压电电机[40],如图4所示。该电机将电磁力引入到非接触式压电电机中,克服了非接触式压电电机输出转矩较小的缺陷,在未来工程实际中具有重要的应用价值。

图4 电磁夹持非接触式旋转压电电机
随着科技的发展和研究的深入,类似电磁式的新型压电微电机还会被研发出来。压电微电机在尖端科技领域的作用将会进一步加强。
综合国内外压电电机的研究现状,作者认为以下几个方面会成为未来科研热点研究方向:(1)高度集成的微纳米尺寸的低速大转矩的压电微电机会继续在航空、国防、武器装备等领域发挥重要作用;(2)价格低廉、结构简单、形状各异的压电微特电机会在家用设备中得以应用;(3)如何提高中国压电微电机产品转化率,使试验样机成为工业产品是未来科研和技术人员亟待解决的问题。以上三大方向的研究会加快压电微电机的各方位的工程应用。
4 结 语
社会的发展对微型传动机构的应用越来越广泛,压电微电机作为一类特种微型传动电机已经在工业和社会各行业获得极其广泛的应用。在中国,压电微电机的应用技术还有很大的发展空间,各种跨学科领域的压电微特电机还有待探索和研究。在未来的科技发展中,对于压电微电机的关注还会进一步提升。
[1] 王国彪,赖一楠,范大鹏,等.新型精密传动机构设计及制造综述[J].中国机械工程,2010,21(16): 1891-1897.
[2] PASQUALE M. Mechanical sensors and actuators [J]. Sensors and Actuators A, 2003,160(1/3): 142-148.
[3] 鄂世举,吴博达,杨志刚.压电式微小驱动器的发展及应用[J].压电与声光,2002,24(6): 447-451.
[4] 秦大同.机械传动科学技术的发展历史与研究进展[J].机械工程学报,2003, 39(12): 37-43.
[5] 芦亚萍,孟繁琴,袁云龙.超声波电机研究现状[J].微电机,2005,38(5): 75-77.
[6] AKIYAMA Y.日本超声电机现状[J].压电与声光,2008,(4): 58-62.
[7] 栗大超,靳世久,曾周末,等.压电超声微电机的研究现状与应用前景[J].微电机,2001,34(3): 31-34.
[8] 赵淳生,熊振华.国内压电超声马达研究的现状和发展[J].振动、测试与诊断,1997,17(6): 1-7.
[9] 黄国庆,刘群亭,黄卫清,等.直线型超声电机研究的现状[J].微特电机,2003,(2): 24-26+30.
[10] 赵淳生.面向21世纪的超声电机技术[J].中国工程科学,2002,4(2): 86-91.
[11] 赵淳生,李朝东.日本超声电机的产业化、应用和发展[J].振动、测试与诊断,1999,19(1): 1-7.
[12] AKIYAMA Y. Present status of ultrasonic motors in Japan [J]. J. Elect. Eng., 1987, 24: 76-80.
[13] 指田年生.振动片型和表明波型超声波电机(译)[J].压电与声光,1985,7(1): 73-78.
[14] VASILIEV P,KLIMAVICHJUS R,KONDRATIEV A,et al.Vibration motor control:UK, GB2020857A[P].1979.
[15] 于寒冰.不断发展的超声电机[J].日本的科学与技术,1995,(5):39-44.
[16] MORITA T,KUROSAWA M K,HIGUCHI T.A cylindrical micro ultrasonic motor using PZT thin film deposited by single process hydrothermal method (Φ2.4mm,L=10mm stator transducer) [J]. IEEE Transactions on Ultrasonics, Ferroelectrics and Frequency Control,1998,45(5): 1178-1187.
[17] KOC B,CAGATAY S,UCHINO K.A piezoelectric motor using two orthogonal bending modes of a hollow cylinder [J]. IEEE Trans.Ultrason. Ferroelectr. Frequency Control,2002,49(4): 495-500.
[18] KANDA T,MAKINO A,OOMORI Y,et al.A cylindrical micro ultrasonic motor using micro-Machined piezoelectric vibrator [C]//The 13th International Conference on Solid-state Sensors and Actuators and Microsystems, Seoul, Korea, 2005: 721-724.
[19] MASHIMO T. Micro ultrasonic motor using a one cubic millimeter stator [J]. Sensors and Actuators, A: Physical, 2014, 213(7): 102-107.
[20] 周铁英,董蜀湘.环形三迭片超声振子及用其钳位的微动马达:中国,89109320[P].1989-12-21.
[21] 赵淳生.21世纪超声电机技术展望[J].振动、测试与诊断,2000, 20(1):7-12.
[22] 江溯,孙立宁,安辉,等.机构、驱动、检测一体化的压电陶瓷旋转型驱动器的研究[J].中国机械工程,1997,8(4): 65-67.
[23] 董蜀湘,王淑听,沈文江,等.弯曲振动模式压电超声微马达研究[J].声学学报,1999,24(2): 120-126.
[24] 周铁英,张凯,陈宇,等.1 mm圆柱式超声电机的研制及在OCT内窥镜中的应用[J].科学通报,2005,50(7): 713-716.
[25] ZHOU Xiangyu,CHEN Weishan,LIU Junkao.A novel traveling wave ultrasonic motor using sandwich-type ring stator [C]//ISAF/IWATMD/PFM, PA, United States, 2014.
[26] NAKAMURA K.A trial construction of an ultrasonic motor with fluid coupling [J]. Jap J Appl Phys, 1990, 29(1): 160-161.
[27] YAMAZAKI T. Trial construction of a non-contact ultrasonic motor with an ultrasonically levitated rotor [J]. Jpn J Appl Phys, 1996, 35(5): 3286-3288.
[28] NAKAMURA K,MARUYAMA M,UEHA S.A new ultrasonic motor using electrorheological fluid and torsional vibration [J]. Ultrasonics, 1996,34: 261-264.
[29] STEPANENKO D A,MINCHENYA V T.Development and study of novel non-contact ultrasonic motor based on principle of structural asymmetry [J]. Ultrasonics, 2012,52(7): 866-872.
[30] 季叶,赵淳生.一种圆筒型非接触式超声电机[J].南京航空航天大学学报,2005,37(6): 690-693.
[31] 鄂世举,汤乐超,程光明.非对称波驱动的非接触式超声电机[J].中国电机工程学报,2011,31(9): 94-98.
[32] 陈超,李繁,严小军,等.非接触式球形转子压电作动器的研究[J].中国电机工程学报,2012,32(6): 163-169.
[33] QIU W,HONG Y,MIZUNO Y,et al.Non-contact piezoelectric rotary motor modulated by giant electrorheological fluid [J]. Sensors and Actuators, 2014, 217: 124-128.
[34] ISHIDA M,HAMAGUCHI J,SHIRASUKA K,et al.A new friction-type piezoelectric motor utilizing mechanism of the strain wave gearing [M]. USA: PacificGrove, 1990: 1199-1204.
[35] OLIVER B.Harmonic piezodrive-miniaturized servo motor [J]. Mechatronics, 2000, 10(4): 545-554.
[36] 辛洪兵,郑伟智.压电谐波电机的研究[J].压电与声光,2004,26(2): 121-125.
[37] 李霞,郭正阳,张伟伟,等.换能器式波发生器驱动的压电谐波电机设计与分析[J].微电机,2014,47(11): 19-22+31.
[38] XU Lizhong,LI Chong.Coupled dynamics for an electromechanical integrated harmonic piezodrive system [J].Arabian Journal for Science and Engineering, 2014, 39(12): 9137-9159.
[39] 沈大雷.南航助“嫦娥”完美登月[N].中国教育报,2013-12-18(8).
[40] 邢继春,李冲,许立忠. 基于电磁夹持非接触式旋转压电电机:中国,201410826520.8[P].2015-04-29.
作者简介:李冲(1988-),男,博士研究生,研究方向为机电集成压电谐波传动系统。
Overview of Micro Piezodrive Motors
LI Chong,XU Li-zhong,GAO Li-chao,HE Xiao-dong
(Yanshan University, Qinhuangdao 066004, China)
The piezoelectric micro motors' characteristics and the wide application prospects in advanced technology field were introduced. According to contact form between stator and rotor, the classification of piezoelectric micro motors was given, and research status at home and abroad of piezoelectric motors was discussed. Base on the advantage and disadvantage of various piezoelectric motors, the application scope of different piezoelectric motors was analyzed. Taking an electromagnetic type non-contact piezoelectric motor as example, the developing trend and wide application prospect of piezoelectric micro motors were indicated.
piezoelectric micro motors; research status; developing trend; application fields
王新君(1991-),男,硕士研究生,研究领域为DSP的交流电机调速与伺服控制。
2015-06-08
国家自然科学基金项目(51275441);河北省研究生创新项目(00302-6370001)
TM359.9
A
1004-7018(2016)03-0071-05
猜你喜欢
物流技术与应用(2022年8期)2022-08-26 04:10:54
物流技术与应用(2020年4期)2020-05-06 03:31:28
压电与声光(2019年1期)2019-02-22 09:46:06
中国自行车(2018年8期)2018-09-26 06:53:30
四川冶金(2018年1期)2018-09-25 02:39:26
铜仁学院学报(2018年6期)2018-07-05 09:47:40
制造技术与机床(2017年3期)2017-06-23 08:11:52
通信电源技术(2016年1期)2016-04-16 04:57:26
电机与控制应用(2015年3期)2015-03-01 03:49:59
振动、测试与诊断(2014年6期)2014-03-01 01:14:55